目录
1 概述Summary…………………………………………………………………………………………. 4
1.1 目的Purpose…………………………………………………………………………………………. 4
1.2 范围Range…………………………………………………………………………………………. 4
1.3 术语及缩写Terms and Abbreviations……………………………………………………………………. 4
1.4 设计与实验标准Design and Experimental Standards………………………………………………5
1.4.1 设计标准Design Standard……………………………………………………………………..5
1.4.2 设计标准执行优先顺序Priority of Design Standard Execution…………………….. 5
2 功能规范Functional specification……………………………………………………………………………………7
2.1 功能描述Functional Description……………………………………………………………………………..7
2.1.1 工作条件与应用范围…………………………………………………………………………………. 7
2.1.2 道路交通Road Traffic……………………………………………………………………………. 7
2.1.3 天气与光线Weather and Light…………………………………………………………………….8
2.2 传感器方案及需求Sensor Scheme and Requirements……………………………………………..9
2.2.1 环境感知Environmental Perception………………………………………………………. 9
2.2.2 驾驶员状态Driver status…………………………………………………………………………….9
2.2.3 雷达Radar………………………………………………………………………………….10
2.2.4 地图Map………………………………………………………………………………….10
2.3 执行器方案及需求Actuator Solutions and Requirements……………………………………… 11
2.3.1 纵向控制Longitudinal control………………………………………………………………… 11
2.3.2 横向控制Lateral control………………………………………………………………………….. 11
2.4 接口描述Interface Description…………………………………………………………………………….12
2.4.1 输入信号Input signal………………………………………………………………………….. 12
2.4.2 输出信号Output Signal………………………………………………………………………….. 15
2.5 HMI 描述HMI Description……………………………………………………………………………….. 16
2.5.1 按键方案描述Key Scheme Description………………………………………………………. 16
2.5.2 仪表显示方案描述Instrument Display Scheme Description…………………………17
2.6 功能使用场景描述Function usage scenario description…………………………………………17
2.6.1 基本场景一(道线类型) Basic Scenario 1 (Line Type)…………………………….. 18
2.6.2 基本场景二(前车)Basic Scene 2 (Leading vehicle)…………………………………. 22
2.6.3 基本场景三(侧前车)Basic Scenario 3 (Front Side vehicle)………………………. 23
2.6.4 基本场景四(邻车)Basic Scenario IV (Neighboring Vehicles)…………………… 26
2.6.5 基本场景五(侧后车)Basic Scenario V (Side Rear Vehicle)………………………. 27
2.6.6 基本场景六(后车)Basic Scene 6 (Rear Vehicle)……………………………………… 31
2.6.7 特殊场景Special Scene………………………………………………………………………….. 33
3 算法机制Algorithmic mechanism………………………………………………………………………………….39
3.1 DCLC_FSM 功能逻辑与状态转移图…………………………………………………………………….39
3.2 DCLC_FSM 状态说明State description of DCLC_FSM…………………………………………39
3.2.1 DCLC_FSM 各功能状态描述……………………………………………………………………..39
3.2.2 DCLC_FSM 状态转移条件描述………………………………………………………………….41
附录DCLC_FSM 参数列表……………………………………………………………………………………….. 46
1 概述Summary
1.1 目的Purpose
本文档的目的是描述ADC(ADAS Domain Controller) 系统中换道(Driver Controlled Lane Change,DCLC)功能的技术规范和设计说明。
The purpose of this document is to describe the technical specifications and design instructions for the functions of Driver Controlled Lane Change in ADC (ADAS Domain Controller) system.
1.2 范围Range
本文档适用于ADC 系统中DCLC 功能的整个生命周期。
This document is applicable to the whole life cycle of DCLC function in ADC system.
1.3 术语及缩写Terms and Abbreviations
序号术语或缩写描述
1.4 设计与实验标准Design and Experimental Standards
1.4.1 设计标准Design Standard
设计标准-非法规类Design Standards – Illegal Regulations
TBD
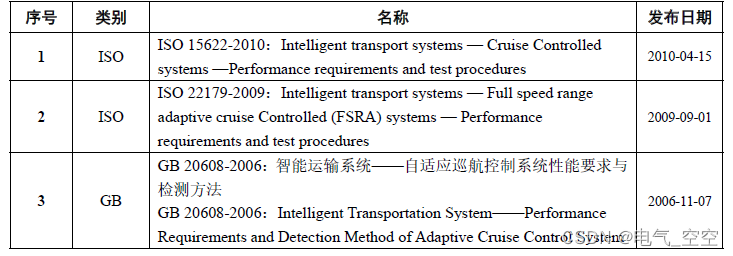
设计标准-法规类Design Standards – Classification of Laws and Regulations
2 功能规范Functional specification
2.1 功能描述Functional Description
在车辆行驶过程中,会遇到不同场景,根据不同场景选择不同的驾驶方式。
当驾驶员发出指令指令,根据车辆当前状态和状态机的状态转换条件,进行驾驶状态的转移,换道功能可以根据车辆行驶状况及交通情况,对驾驶行为进行评估,在满足条件时自主执行,以此减轻驾驶员的操作负担。
原文地址:https://blog.csdn.net/weixin_45905610/article/details/134647605
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。
如若转载,请注明出处:http://www.7code.cn/show_15417.html
如若内容造成侵权/违法违规/事实不符,请联系代码007邮箱:suwngjj01@126.com进行投诉反馈,一经查实,立即删除!