今天分享的是机器人系列深度研究报告:《2023机器人灵巧手的分类与商业化应用及未来市场规模分析报告》。
报告共计:26页

1 灵巧手是人形机器人重要的运控交互部件,近年来海内外研究进展加速
1.1 灵巧手是机器人的新型末端执行器,在运控交互中起关键作用
灵巧手是机器人的一种新型末端执行器。一般而言,机器人与环境交互的方式主要包括: 移动行走、视觉等信息的获取、决策的执行输出。末端执行器(End.Effector) 是机器人执行部件的统称,一般安装于机器人腕部的末端,是直接执行任务的装置。末端执行器作为机器人与环境相互作用的最后环节与执行部件,对提高机器人的柔性和易用性有着极为重要的作用,其性能的优劣在很大程度上决定了整个机器人的工作性能。

灵巧手以人手的结构和功能为模仿对象,在机器人与环境的交互中起着关键作用。“灵巧”指的是手的姿势可变性,这种可变性越高,则认为手就越灵巧。机器人灵巧手从结构和功能上参考人手,能够灵活操作对象,实现对物体的灵活抓取,满足多种工作需求。多指灵巧手最普遍的手指数目为 3-5个,各手指具有 3个关节,手指关节的运动副都是采用转动副。
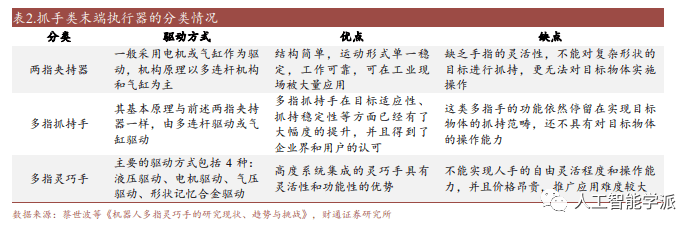
两指央持器:是抓持物体进而操控物体的装置,模仿的是手指的央持运动。它能够在执行某些动作的同时央住和松开目标物体。应用于机器人的末端央持器一般采用电机或气缸作为驱动,机构原理以多连杆机构和气缸为主。例如德SCHUNK 公司的气动平行爪央持器、FESTO 公司的气动夹持器、亚德客手指气缸等。

多指抓持手:一般为三指或者四指抓持手,主要包括联动型抓持手、多关节手指抓持手、软体多指抓持手等,其基本原理与前述两指央持器一样,由多连杆驱动或气缸驱动实现多指的同步运动。例如 Righthand Robotics 公司的 ReFlexTakkTile三指手、苏州钧舵机器人有限公司的均巧三指手、德国 SCHUNK 公司的 3-fingergripper hand SDH 等。
多稽灵巧手;机构形式是多指多关节,并且最普遍的是手指数目为 3~5 个,各手指具有 3 个关节,手指关节的运动副都是采用转动副。灵巧手主要的驱动方式包括4种: 液压驱动、电机驱动、气压驱动、形状记忆合金驱动。如日本“电子技术实验室”的 Okada 灵巧手、美国斯坦福大学研制成功了 Stanford/JPL 灵巧手美国麻省理工学院和犹他大学联合研制的 Utah/MIT 灵巧手等。

1.2 灵巧手是机器人研究的重要课题,近年来国内外研究进展加速
自20世纪 70年代起,国内外对灵巧手展开了大量研究,从三指到五指,从工业到生活,从简单的抓取到灵巧操作,以期解决复杂的实际作业问题。
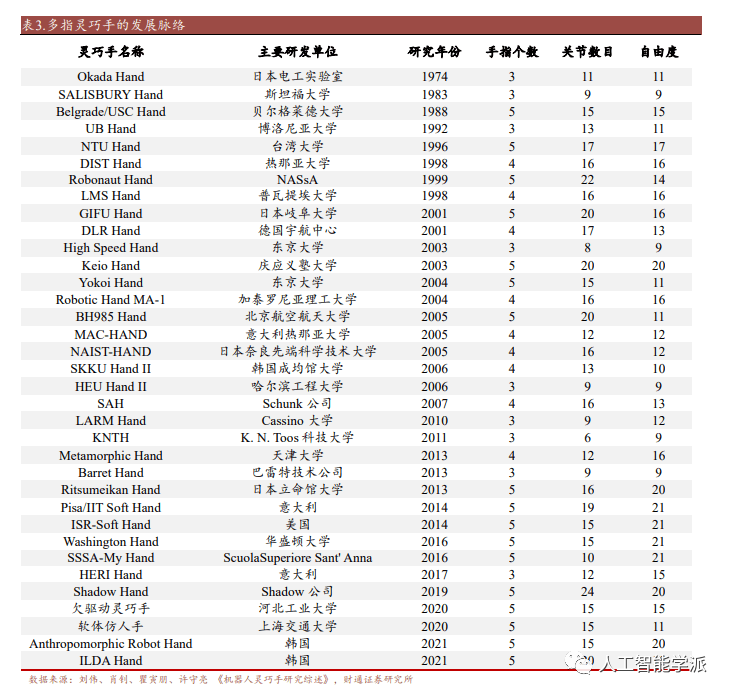
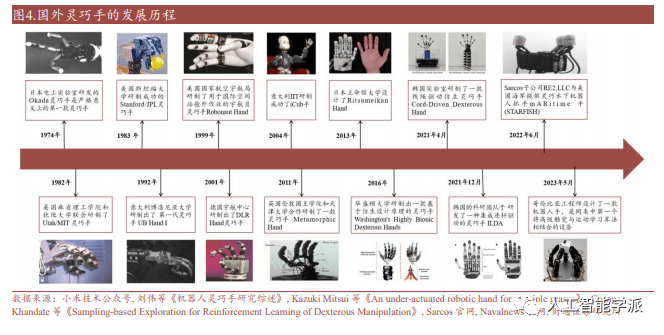
海外灵巧手研究历经了 50 余年的发展,从开始简单的机械手发展成现在的高科技人形仿生灵巧手。
(1) 20 世纪 70 年代,日本“电子技术实验室”研制出了Okada 灵巧手,该灵巧手具有 3 个手指和一个手掌,拇指有 3 个自由度,另外两个手指各有 4个自由度,采用电机驱动和肌腿传动方式。
(2) 20世纪 80年代,美国斯坦福大学研制成功 Stanford/JPL 灵巧手,该手有 3 个手指,每指各有 3 自由度,采用 12 个直流伺服电机作为关节驱动器,采用腿驱动系统传递运动和动力:美国麻省理工学院和犹他大学联合研制 Utah/MIT 灵巧手,该手具有完全相同的4个手指,每个手指有 4 个自由度,为后续仿人型多指灵巧手研究建立了理论基础。
(3) 20 世纪末,随着嵌入式硬件的发展,多指灵巧手的研究向着高系统集成度和丰富的感知能力提升的方向发展,进入了快速发展阶段。
(4) 近年来,高度系统集成的灵巧手具有灵活性和功能性的优势,但是复杂的系统导致了高额的制造成本并且降低了系统的可靠性和易维护性。因此近 10 年,多指灵巧手设计的一个重要方向是简化系统、提高鲁棒性。
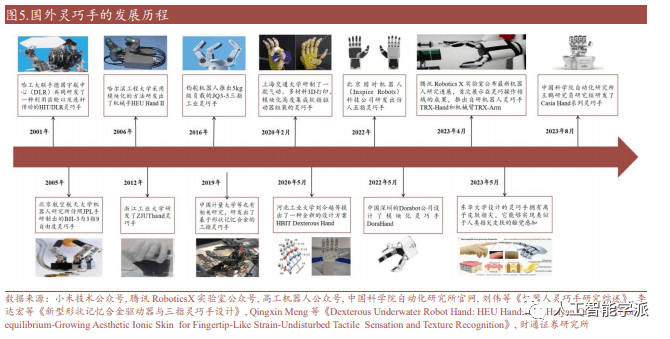
国内灵巧手的研究则是随着国外研究的不断推进。在 2000 年左右国内一些机器人研究机构和部分高等院校相继开展了机器人多指灵巧手的研究工作。
(1) 2001 年,哈工大 (HIT) 联手德国宇航中心(DLR) 共同研发了一种利用齿轮以及连杆传动的 HIT/DLR 灵巧手。DLR 有 4根手指,每根手指有 3 个自由度。指尖部分采用多连杆耦合机构,基础关节的 2个自由度通过差动机构耦合来完成。
(2) 2005年,北京航空航天大学机器人研究所仿照 Stanford/JPL 手研制出了 BH3为3指9自由度灵巧手。BH 灵巧手主要用于多指手的操作理论研究: 通过数据手套可实现远距离控制。最新一代灵巧手 BH-985,其具有 5 个手指,外形尺寸约为人手的 1.5 倍,质量小于 1.5kg,采用内置的 Maxon 直流伺服电机驱动,用齿轮、连杆和钢丝传动。
(3)2022年5月23 日,DoraHand 是由中国深圳的 Dorabot 公司设计的模块化灵巧手。鉴于其 5mmm 的厚度,指尖可以在一些狭小的空间中使用。为了提供类似人类的能力,这款手配备了一个高度敏感的 0.3m 薄膜力传感器,作为触觉传感器,可同时感知力和位置。
(4)2022年,北京Inspire机器人科技公司研发的灵巧手。它有 5个手指、6个自由度和灵活的抓取能力,大小接近人类的手。拇指手指有 2 个自由度,而其他手指只有 1 个自由度。6 个带有肌腿的微型线性致动器用于驱动手指。这款灵巧手的效率很高,可以用于假肢、服务机器人和教学等领域。
(5)2023 年4月25 日,腾讯 RoboticsX 实验室公布最新机器人研究进展,首次展示在灵巧操作领域的成果,推出自研机器人灵巧手 TRX-Hand 和机械臂TRX-Arm。其中,灵巧手TRX-Hand拥有像人手一样灵活的操作能力,可适应不同场景,灵活规划动作,自主完成操作。而机械臂 TRX-Armm 针对人居环境自主研发,拥有七自由度和拟人的特性,具有运动灵巧、爆发力强、触控一体以及柔顺安全等特点。
1.3 目前学术上的研发方向及难点
虽然灵巧手的应用需求凸显并日趋旺盛,这些需求也引领着机器人多指灵巧手的研发方向和发展趋势,但目前的技术和产品依然存在诸多问题和挑战,呕待解决。
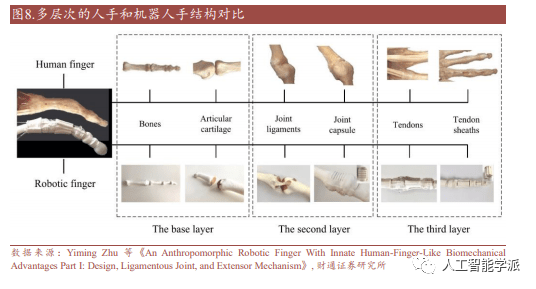
1.深度仿生:多指灵巧手最初是从结构,特别是外形上进行仿生设计。随着更多更复杂的应用功能需求提出,研究人员逐渐开始从人手内在结构、驱动和传动原理等方面思考其仿生结构的设计,并逐步延伸到复合材料、智能材料的研制和设计,智能材料的研究又反过来影响多指灵巧手的仿生设计: 同时,对于人手操作过程的研究,也应属于机器人多指灵巧手仿生研究的重要范畴,会在很大程度上决定多指灵巧手的仿生程度并成为一个重要的衡量指标。
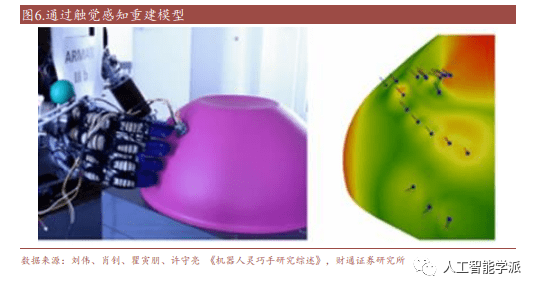
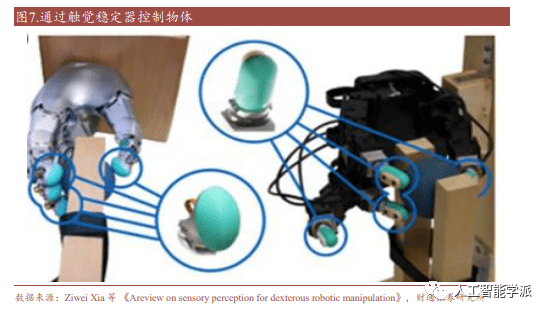
2.柔性感知技术:由于人手结构精巧复杂、功能多样、感觉丰富,实现仿生的机器人灵巧手必然需要像人类皮肤一样能够感知丰富信息的柔性感知技术和传感器.灵巧手触觉传感器用于实时传输与物体的接触信息,目前还面临着几个巨大的挑战需要克服。
(1) 理解高级语义信息。机器人需要从低级感官数据中提取任务需求和人类偏好等高级语义信息,首先要知道被操作的对象是什么,需要进行什么样的操作,即任务要求。
跨模态算法,不同的感觉模式间的知识传递。人类不是通过单一的感官形态来探测物体,而是通过多种感官整合信息,例如触觉/味觉/视觉/声音信息等都可以帮助人类理解物体。例如,视觉数据提供的几何属性,与触觉数据提供的物理属性(如重量或硬度)是互补又共存的,整合多种感知模式的传感器可以解决单一传感器的局限性,并获得更加丰富的环境信息,但对不同模态信息建立统一的特征表示和关联关系的方法仍需进一步探索。
(3) 探索中的安全性问题。在机器人手与物体的物理交互和触觉探索过程中,雪要保证机器人手及其周围环境的安全。一方面,要及时来集触觉信号并传递给控制器的同时,也需要有避免不必要伤害的能力。另一方面,由于对象模型是未知的,机器人可能会违反一些关键的约束。如果在勘探过程中发生意外损伤,具有一定的自愈能力和拉伸能力可以保证系统的安全性。
(4) 提升触觉传感器的灵活性。因为手的表面通常是不规则的,与刚性传感器相比,柔性传感器更容易与手的表面集成柔性传感器可以放置在整个手掌表面,而不是指尖,接触信息更加丰富。触觉传感器的其他性能也需要进一步提高,如自愈能力和自功率。具有自修复能力的触觉传感器可以提高其对非结构环境的适应能力。
3.成本控制:现有的机器人多指灵巧手的销售价格普遍较高。例如: 哈尔滨工业大学-德国宇航中心合作开发的 HIT/DLR 灵巧手售价在 90 万元人民币以上Shadow Dexterous Hand 报价约 30 万美元,德国 SCHUNK 公司的 SVH 五指手报价 70万元人民币以上。高昂的价格是推广应用一大障碍,许多多指手产品也仅仅在科研实验室里用于科学研究和应用基础开发。近年来,各类科研机构开始投入研发低成本的机器人多指手,从材料、加工方式、驱动器件、感知器件等方面进行低成本化设计和制造,开发了一些样机,但其灵活性、感知丰富性和可靠性等指标普遍较低。所以,如何在性能和成本之间取得合理的平衡也是值得研究的课题。
4.新材料的应用:大部分灵巧式机械手的研究都是通过骨架结构以及橡胶等其他软体材料来模拟人手的外形。对于抓/提/捏/拧等日常手部动作来说,虽然可以有效进行,但是在实际应用过程中依然存在着包络性、灵活性和稳定性差等问题。如果要保持灵巧性和抓取的稳定性,根据仿生学对生物机体环境适应性强、高效能、身体结构合理等特点进行模拟及研究,开发出一种新型材料并用于灵巧式机械手的研发,可最大化生物优势。目前,中外通过研发还原肌肉纤维、结构组织等已在拾取装置实际使用中获得较好的效果。
2 机器人灵巧手的分类与商业化应用
2.1 机器人灵巧手的分类
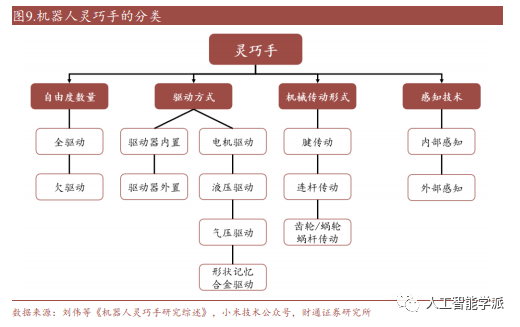
机器人灵巧手作为一种新型的末端执行器,在机器人与环境的交互中起着关键作用。根据自由度数量、驱动方式、机械传动形式以及感知技术的不同,灵巧手可以分为若干类型。
2.1.1自由度数量
机器人灵巧手从结构和功能上参考人手,能够灵活操作对象,实现对物体的灵活抓取,满足多种工作需求。手指拥有两种运动形式,通过各指节旋转副的屈曲/前伸运动以及通过手指末端球形副的侧摆运动。我们暂且定义每根手指屈曲的方向为 Pitch,侧摆的方向为 Roll,那么对于 Pitch 方向的自由度,每根手指都有 3个,共15个,对于Roll方向的自由度,大拇指有2个自由度,其余手指各1个,共 6 个。整手通过这 21 个自由度,实现了复杂多变的人手运动形式。由于真实人手的高自由度、结构紧凑、复杂等特征,绝大多数机械手都无法完美复制人手的功能,其设计和功能都是在某些特定场合和功能要求下的简化和权衡。根据严玺《仿人灵巧手的结构设计及其控制研究》,在通常情况下,灵巧手只需要3根3自由度的手指即可完成大多数任务。

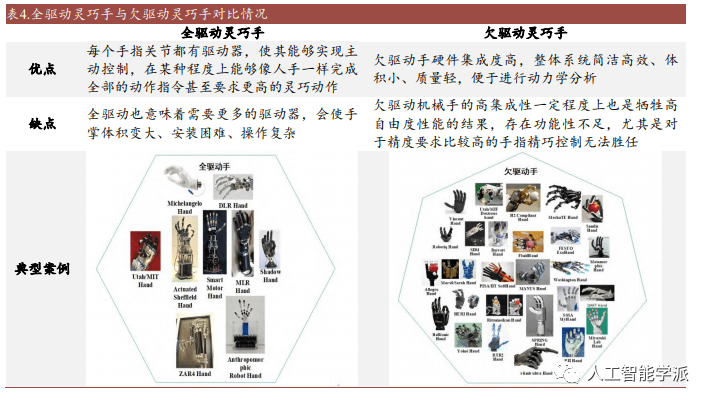
根据自由度与驱动源数量,可将灵巧手分为全驱动和欠驱动两大类。全驱动灵巧手驱动源的数量与被控制灵巧手的自由度数量相等,欠驱动灵巧手被控制的自由度多于驱动源的数目,缺少驱动源的部分则进行耦合随动。
2.1.2驱动方式
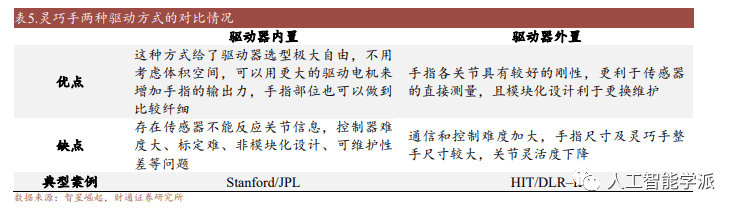
驱动系统是整个系统的动力源,是系统输出力的保证。灵巧手的驱动方式根据驱动器是否布置在手指内分为两种:驱动器内置与驱动器外置。早期的多指灵巧手一般将驱动器外置,主要是受驱动器结构尺寸影响,难以嵌入手指内。随着材料、工艺技术的发展,驱动器的尺寸逐渐减小,机器人多指灵巧手逐渐走向驱动器内置式。驱动器内置很难做到驱动整根手指,于是混合式多指灵巧手的概念就出现了,即驱动器外置和内置相结合的方式,进一步提高手指的输出力矩,保证较高自由度的同时,控制体积大小。
驱动源是驱动系统的动力源,驱动源性能决定了驱动系统的驱动性能。目前,主流的驱动源有:电机驱动、液压驱动、气驱动、形状记忆合(SMA)驱动。
(1)电机驱动:目前多指灵巧手的主要驱动方式,具有驱动力大、控制精度高、响应快、模块化设计、易于更换维护等优点。但是电机本身固有的体积较大等缺陷,导致无论是外置还是内置,都会占用较大的物理空间,并且市场上很难匹配到通用电机。
(2)液压驱动:液压驱动式机械手的驱动系统一般由液动机、伺服阀、油聚和油箱等组成,驱动机械手完成任务,常被用于工业机械手中,适合大型抓取作业。液压驱动能获得较大的工作力,能带动较大的负荷,但体积大,成本高,容易被污染。

原文地址:https://blog.csdn.net/GPT20236688/article/details/134643740
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。
如若转载,请注明出处:http://www.7code.cn/show_24898.html
如若内容造成侵权/违法违规/事实不符,请联系代码007邮箱:suwngjj01@126.com进行投诉反馈,一经查实,立即删除!




