自动驾驶主要流程:感知->预测->规划
预测是预测周围目标(车、行人、动物等)的轨迹,规划是规划自车的运动轨迹。
UniAD[CVPR 2023]:
使用transformer架构,统一自动驾驶流程,完成所有检测,跟踪,建图,轨迹预测,占据栅格预测与规划的端到端推理。
参考:
CVPR 2023 Award Candidate | 自动驾驶通用算法框架UniAD – OpenGVLab的文章 – 知乎
https://zhuanlan.zhihu.com/p/616433397
VAD[ICCV2023]:
核心在于场景表征使用矢量化的方式,非图像常用的栅格化。好处就是可以加快推理。
【「你好,开发者」 ICCV 2023 VAD 基于矢量化环境表征的高效端到端自动驾驶框架】 https://www.bilibili.com/video/BV12u4y1V7zV/?share_source=copy_web
FusionAD
基于BEV统一相机和雷达多模态输入。task使用类似FPN的层级结构。
https://hub.baai.ac.cn/view/28712
Tesla FSD V12
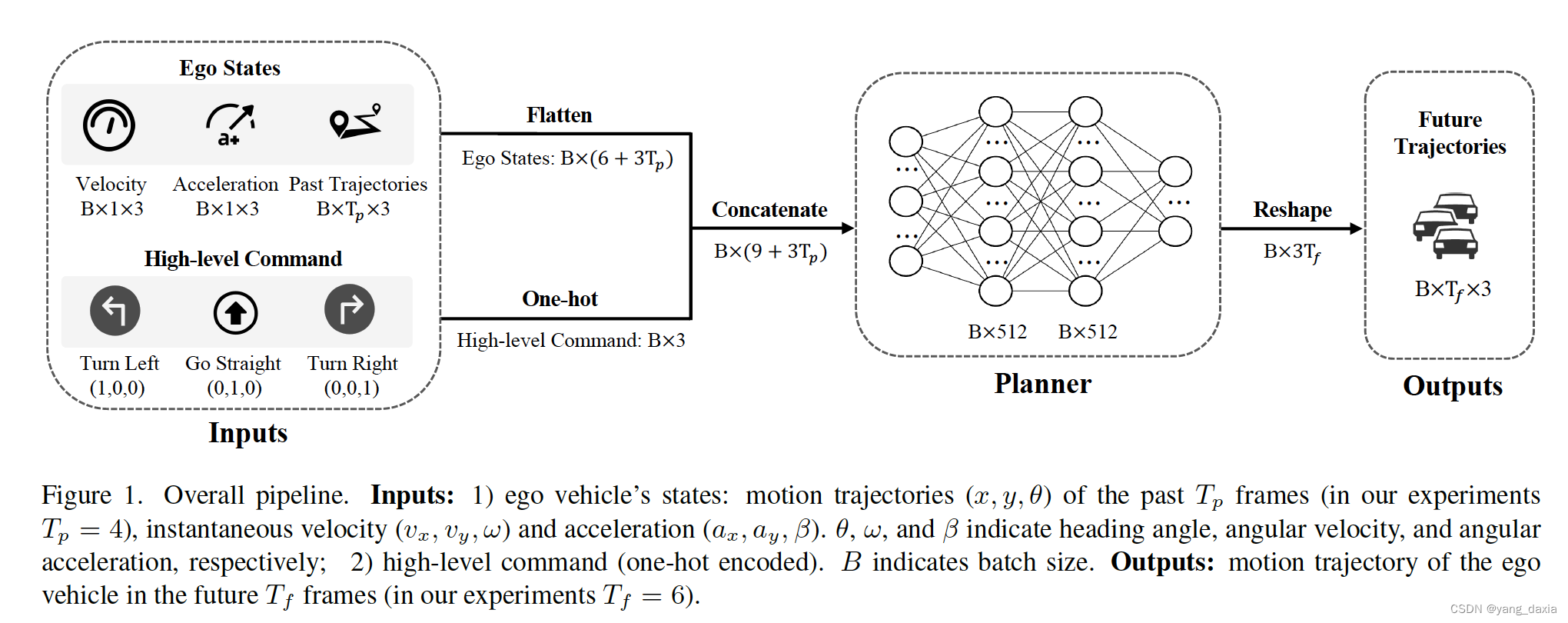
AD-MLP
仅仅使用了传感器数据,利用简单的mlp网络,就在nuscene plan数据集上得到了很好的效果。说明nuscene plan数据集过于简单,仅在这个上面做开环测试不能很好的说明问题,需要引入其他的如仿真环境中做更多的闭环测试。
参考:
端到端自动驾驶算法在 nuScenes 数据集上的开环评测或许并不靠谱 – Muyun99的文章 – 知乎
https://zhuanlan.zhihu.com/p/654533840
https://zhuanlan.zhihu.com/p/669454065
原文地址:https://blog.csdn.net/yang_daxia/article/details/135482976
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。
如若转载,请注明出处:http://www.7code.cn/show_55296.html
如若内容造成侵权/违法违规/事实不符,请联系代码007邮箱:suwngjj01@126.com进行投诉反馈,一经查实,立即删除!