本文介绍: RT-Thread的定时器提供两类定时器机制:第一类是单次触发定时器,这类定时器在启动后只会触发一次定时器事件,然后定时器自动停止。第二类是周期触发定时器,这类定时器会周期性的触发定时器事件,直到用户手动的停止,否则将永远持续执行下去。另外,根据超时函数执行时所处的上下文环境,RT-Thread的定时器可以分为HARD_TIMER模式与SOFT_TIMER模式。
时钟管理
时间是非常重要的概念,和朋友出去游玩需要约定时间,完成任务也需要花费时间,生活离不开时间。
操作系统也一样,需要通过时间来规范其任务的执行,操作系统中最小时间单位是时钟节拍(OS Tick)。
时钟节拍
任何操作系统都需要提供一个时钟节拍,以供系统处理所有和时间有关的事件,如线程的延时、线程的时间片轮转调度以及定时器超市等。
时钟节拍是特定的周期性中断,这个中断可以看做是系统心跳,中断之间的时间间隔取决于不同的应用,一般是1ms~100ms,时钟节拍率越快,系统的实时响应越快,但是系统的额外开销就越大,从系统启动开始计数的时钟节拍数称为系统时间。
RT-Thread中,时钟节拍的长度可以根据RT_TICK_PER_SECOND的定义来调整,等于1/RT_TICK_PER_SECOND秒。
时钟节拍的实现方式
时钟节拍由配置为中断触发模式的硬件定时器产生,当中断到来时,将调用一次:void rt_tick_increase(void),通知操作系统已经过去一个系统时钟;不同硬件定时器中断实现都不同。
可以看到全局变量rt_tick在每经过一个时钟节拍时,值就会加1,rt_tick的值表示了系统从启动开始总共经过的时钟节拍数,即系统时间。
此外,每经过一个时钟节拍时,都会检查当前线程的时间片是否用完,以及是否有定时器超时。
获取时钟节拍
定时器管理
RT-Thread定时器介绍
HARD_TIMER模式
SOFT_TIMER模式
定时器工作机制

定时器控制块
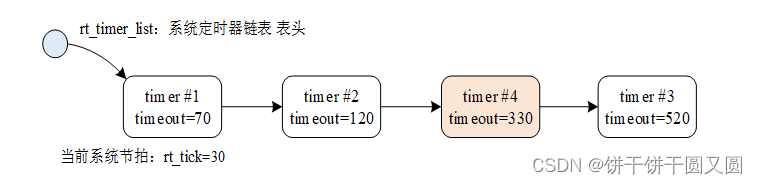
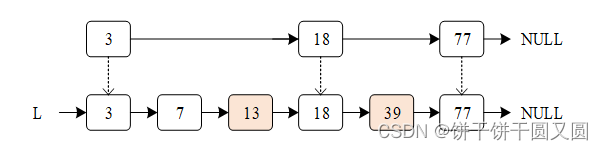
定时器跳表(Skip List)算法

定时器的管理方式
启动和停止定时器
高精度延时
声明:本站所有文章,如无特殊说明或标注,均为本站原创发布。任何个人或组织,在未征得本站同意时,禁止复制、盗用、采集、发布本站内容到任何网站、书籍等各类媒体平台。如若本站内容侵犯了原著者的合法权益,可联系我们进行处理。