本文介绍: 轨迹绘制是一项重要的技术,它在各个领域中都具有广泛的应用。无论是在自动驾驶系统中,还是在运动轨迹分析方面,轨迹绘制都能提供有关运动和路径的有用信息。本文将介绍轨迹绘制的基本原理和常见应用场景,并探索一些用于路径规划和轨迹可视化的技术。

🎬 鸽芷咕:个人主页
🔥 个人专栏: 《linux深造日志》《粉丝福利》
⛺️生活的理想,就是为了理想的生活!
⛳️ 推荐
前些天发现了一个巨牛的人工智能学习网站,通俗易懂,风趣幽默,忍不住分享一下给大家。点击跳转到网站。
引入
轨迹绘制是一项重要的技术,它在各个领域中都具有广泛的应用。无论是在自动驾驶系统中,还是在运动轨迹分析方面,轨迹绘制都能提供有关运动和路径的有用信息。本文将介绍轨迹绘制的基本原理和常见应用场景,并探索一些用于路径规划和轨迹可视化的技术。
- 下面我们就来使用Apollo 的Dreamview+工具来试下吧
步骤一:安装并启动 Dreamview+
这里可以去看一下官方的启动文档哦,博主就不过多演示了
- 社区操作文档 https://apollo.baidu.com/
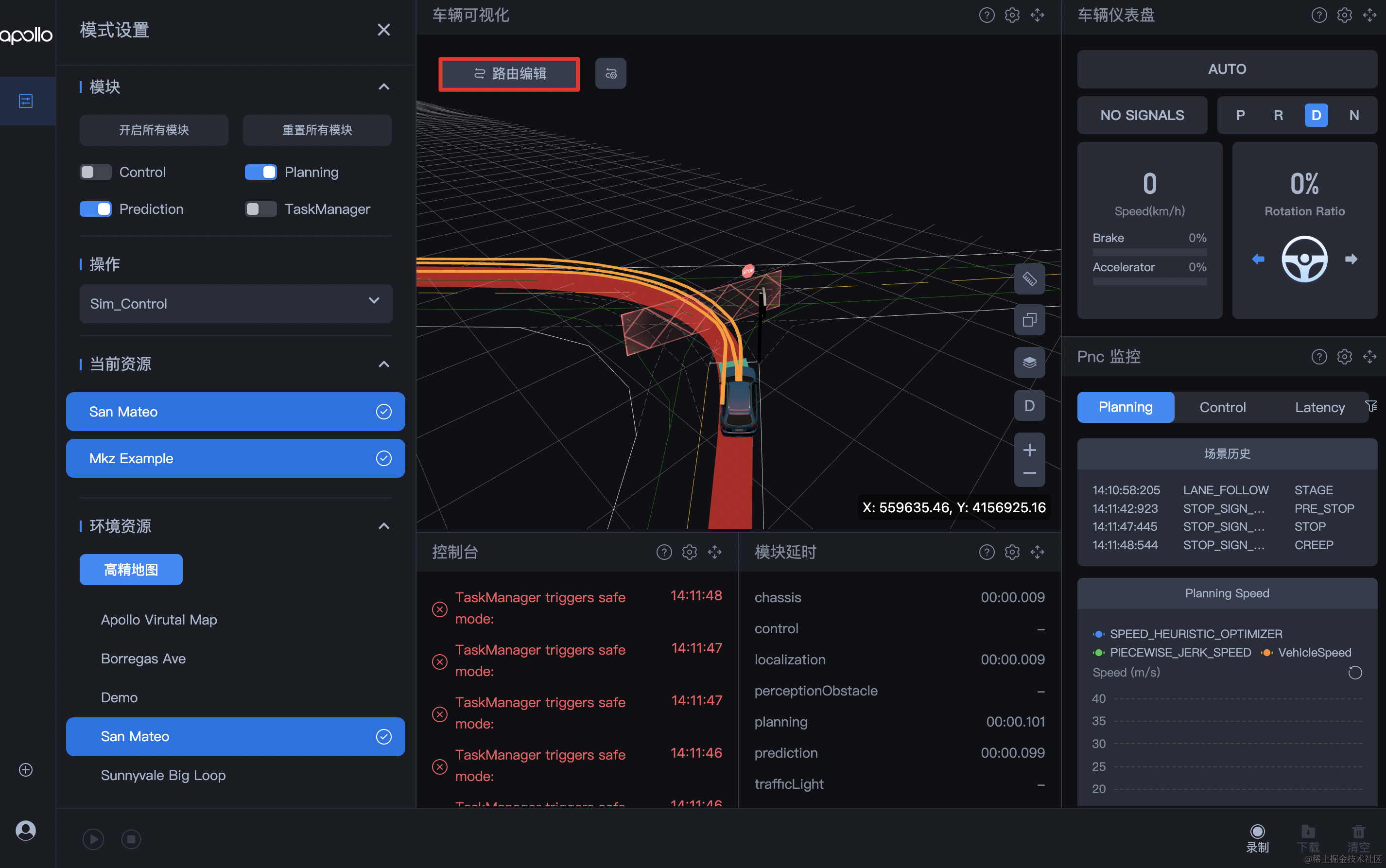
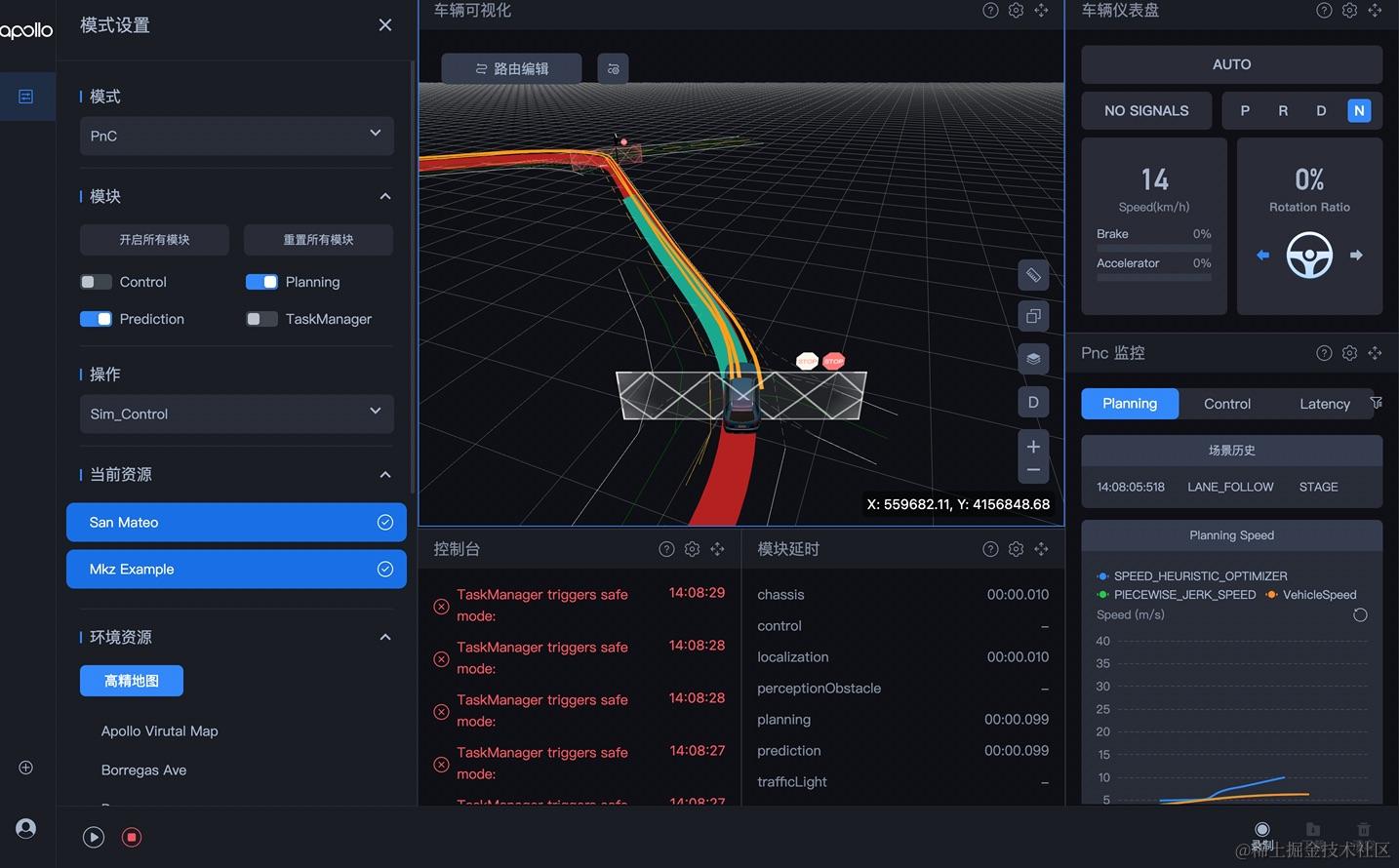
步骤二:选择仿真模式
在 操作 中选择 Sim_Control 或者 Scenario_Sim 。此处以 Sim_Control 为例。
步骤三:选择地图和车辆
-
在 环境资源 中选择地图。此处以 San Mateo 为例。
-
在 自动驾驶系统资源 中选择车辆。此处以 Mkz Example 为例。
注意:车辆为可选操作。
步骤四:开启轨迹绘制
- 在 车辆可视化 面板中单击 路由编辑 开启路由编辑功能。
- 单击左上角初始位置图标,在地图上单击设定初始位置。
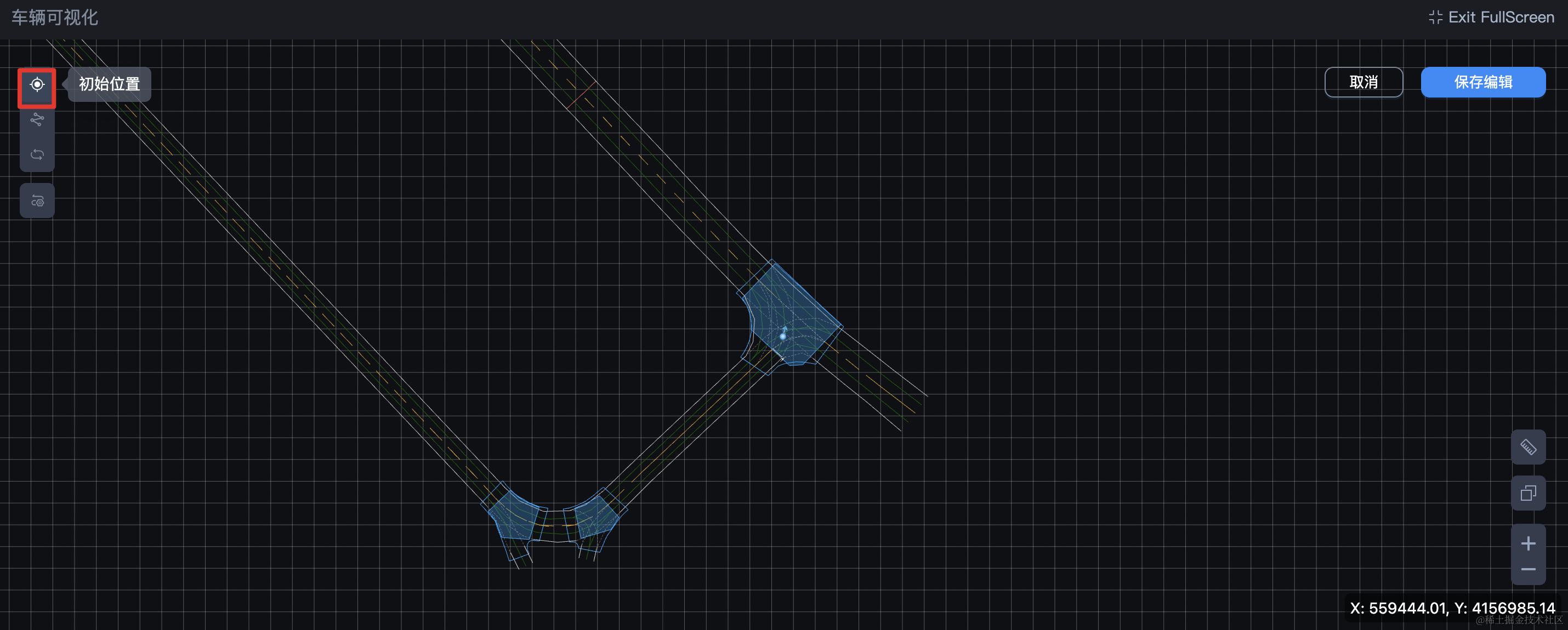
注意:长按鼠标右键可以拖拽移动地图位置。
- 单击左上角轨迹点图标,在地图上单击添加途径轨迹点。
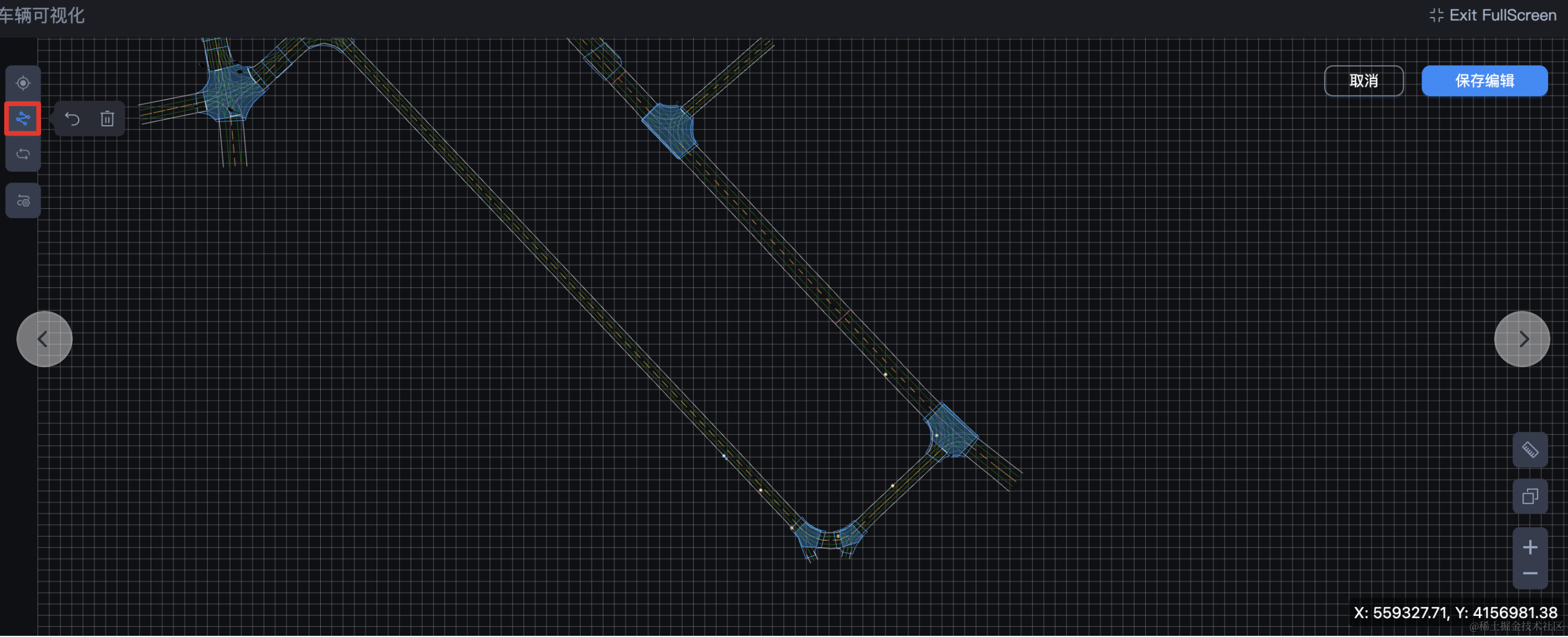
注意:长按拖拽可以修改初始位置和轨迹点的方向。
- 单击 保存编辑 ,完成轨迹绘制。
步骤五:开启模块,查看规划效果
开启 Planning 和 Prediction 模块,并打开底部操作栏的播放按钮,查看规划效果。
原文地址:https://blog.csdn.net/qq_57761637/article/details/135962004
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。
如若转载,请注明出处:http://www.7code.cn/show_63793.html
如若内容造成侵权/违法违规/事实不符,请联系代码007邮箱:suwngjj01@126.com进行投诉反馈,一经查实,立即删除!
声明:本站所有文章,如无特殊说明或标注,均为本站原创发布。任何个人或组织,在未征得本站同意时,禁止复制、盗用、采集、发布本站内容到任何网站、书籍等各类媒体平台。如若本站内容侵犯了原著者的合法权益,可联系我们进行处理。