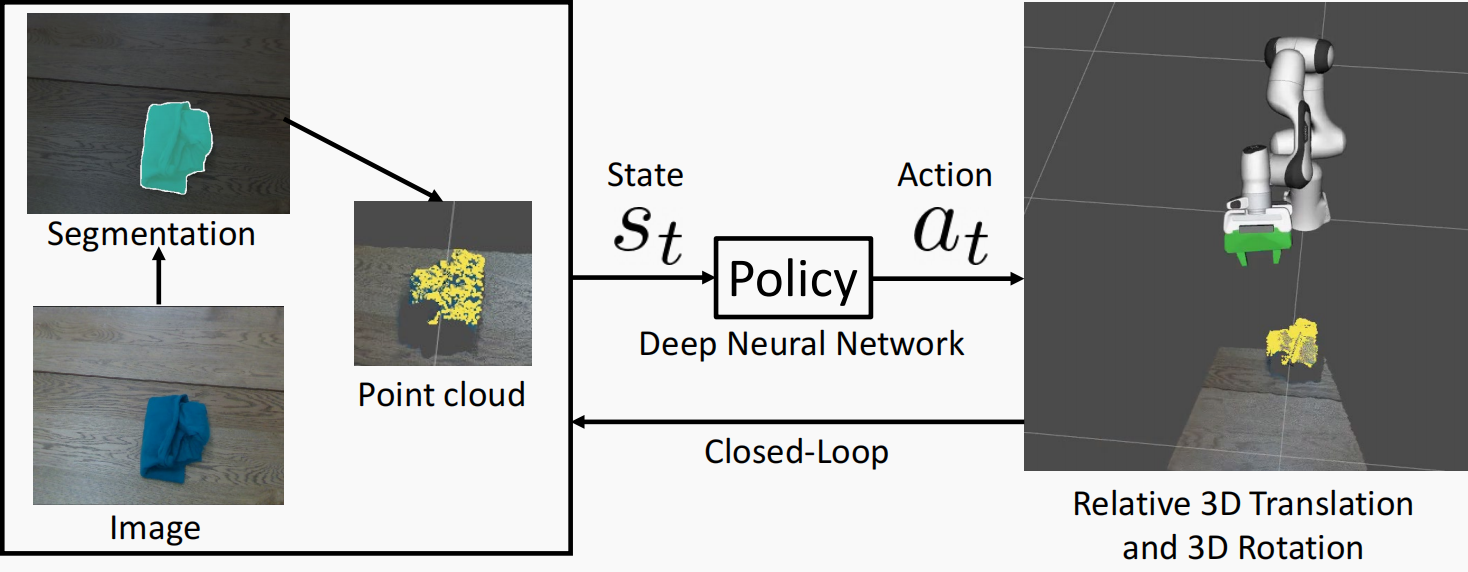
互联网 论文笔记(四十)Goal-Auxiliary Actor-Critic for 6D Robotic Grasping with Point Clouds 本文介绍: 超越自上而下的垃圾箱拣选场景的 6D 机器人抓取是一项具有挑战性的任务。以往基于...
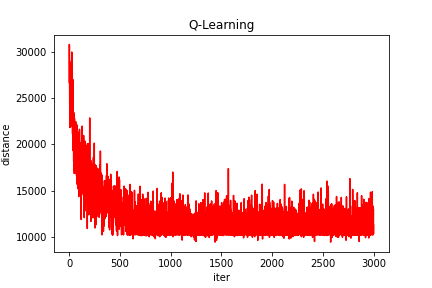
python 强化学习应用(一):基于Q-learning的无人机物流路径规划研究(提供Python代码) 本文介绍: Q-learning是一种强化学习算法,用于解决基于马尔可夫决策过程(MDP)的...
python 强化学习求解TSP(一):Qlearning求解旅行商问题TSP(提供Python代码) 本文介绍: Q-learning是一种强化学习算法,用于解决基于奖励的决策问题。它是一种无模...