首页
web
php
html
css
vue
小程序
mysql
python
android
java
chatgpt
linux
大数据
redis
隐私协议
登录
规划
价格
价格
免费
付费
会员免费
会员折扣
永久会员免费
排序
发布日期
更新日期
评论数量
随机展示
热度排行
互联网
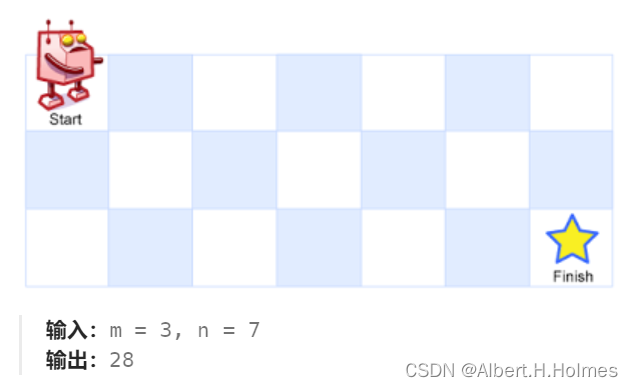
C++算法学习心得八.动态规划算法(1)
本文介绍: 动态规划理论基础:动态规划是一个问题有很多子问题时候使用非常适合,其是由上一个状...
互联网
用于自动驾驶最优间距选择和速度规划的多配置二次规划(MPQP) 论文阅读
本文介绍: 本文详细解读了用于自动驾驶最优间距选择和速度规划的多配置二次规划MPQP 论文链...
互联网
一种具有轨迹优化的无人驾驶车实时运动规划器 论文阅读
本文介绍: 本文对这篇论文做了详细解读,不正处希望读者指正和交流 论文题目:A Real-T...
互联网
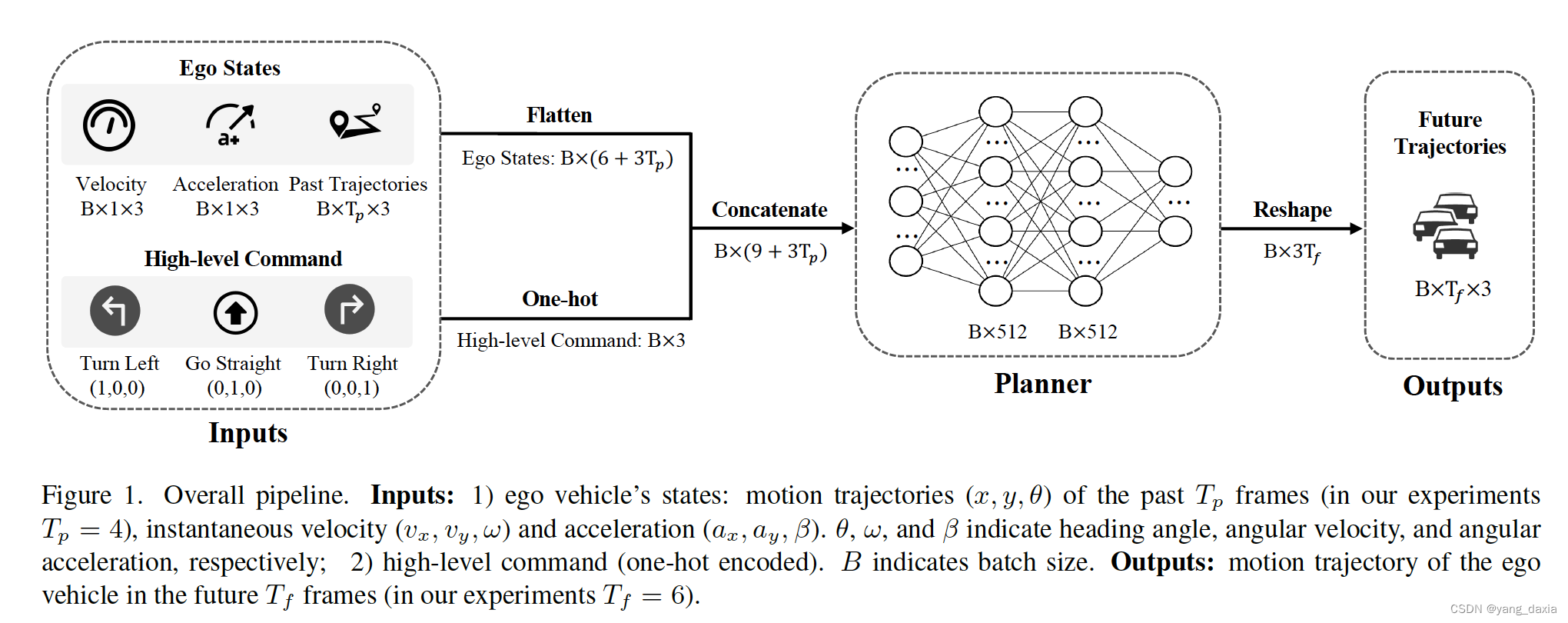
端到端自动驾驶
本文介绍: 自动驾驶主要流程:感知->预测->规划预测是预测周围目标(车、行人、...
互联网
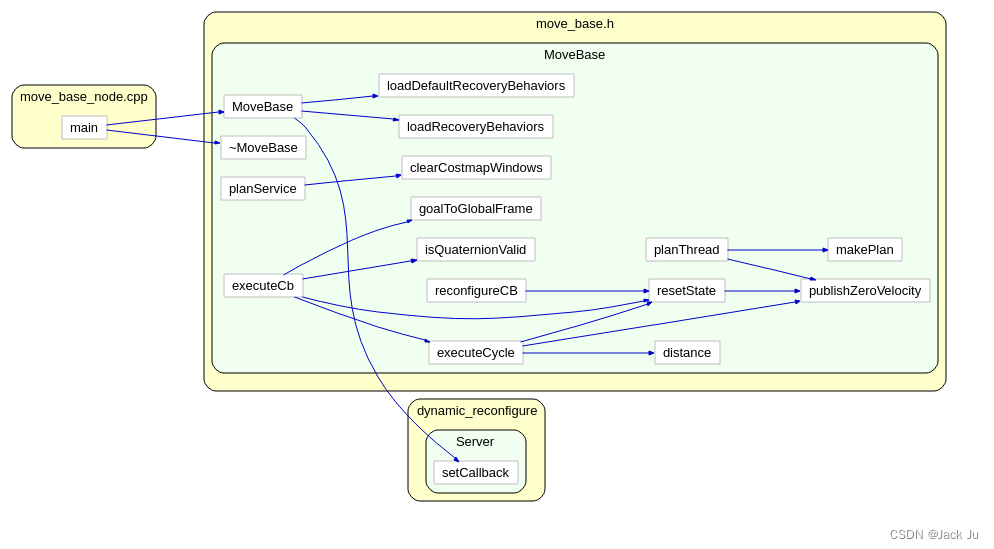
机器人规划算法——movebase导航框架源码分析
本文介绍: 这里对MoveBase类的类成员进行了声明,以下为比较重要的几个类成员函数。 这...
互联网
2023亚太地区数学建模C题思路分析+模型+代码+论文
本文介绍: 非线性规划研究一个 n元实函数在一组等式或不等式的约束条件下的极值问题,且 目标...
首页
我的
顶部
全部
ajax
android
apache
bash
centos
chatgpt
css
dedecms
django
echarts
elementui
ffmpeg
golang
html
java
jquery
layui
linux
mysql
news
nginx
node.js
nodejs
npm
objective-c
pandas
php
pip
python
redis
spring
swift
thinkphp
tomcat
typescript
uniapp
vue
webview
wordpress
xcode
互联网
大数据
小程序
数据库
正则
爬虫
缓存
android
css
html
html
java
java
linux
linux
mysql
mysql
python
python
redis
spring
vue
vue
互联网
安装