0.设备、环境和说明
笔记本电脑i5-8300H、GTX 1060、32GRAM
因为后面要测试Vins-Fusion和ORB-SLAM3,所以推荐安装Ubuntu 18.04(或者Ubuntu 20.04) + ROS 1(不建议用比Ubuntu18更低的版本)
ROS一键安装命令:
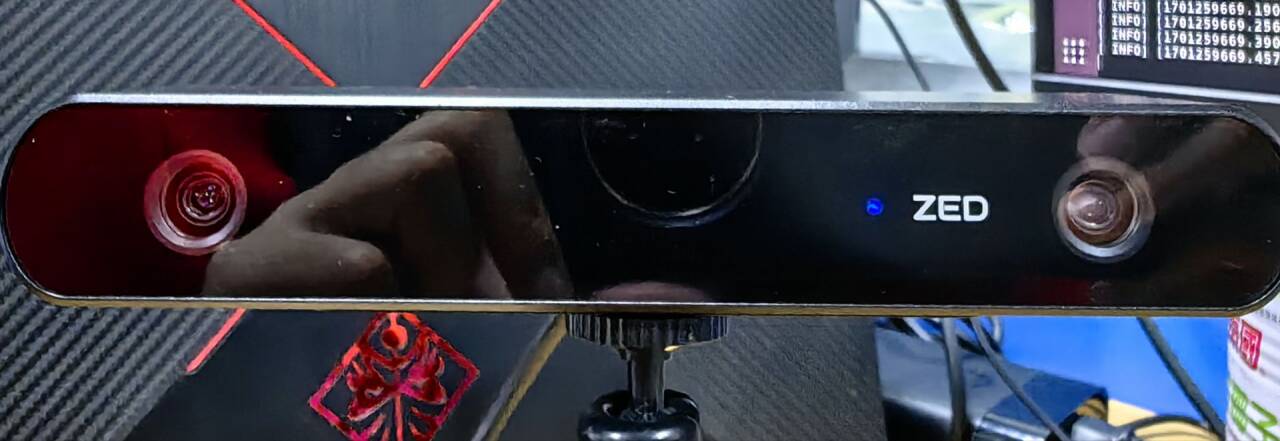
ZED 2i:双目相机配有9轴IMU
此前电脑已经配置好:Ubuntu 18.04,ROS 1,Vins-Fusion,OpenCV 3.2.0,ceres–solver 1.14.0,CMake 3.12,Eigen 3.3.3,g2o(20年版本),Pangolin-0.6,Kalibr,imu_code等。
1.安装ZED SDK3.8.2
官方手册Linux版本: https://www.stereolabs.com/docs/installation/linux/
选择静默安装即可,跳过CUDA检查。ZED相机依赖CUDA加速,所以电脑必须要安装CUDA!
其中关于CUDA的解释:
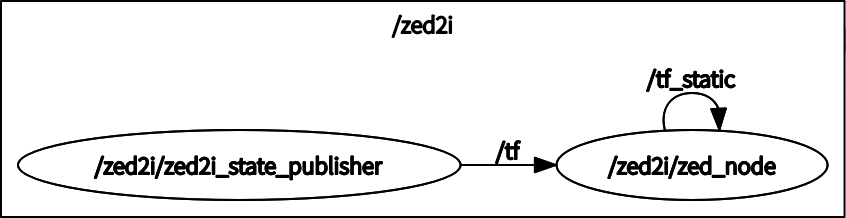
2.安装ZED-ROS

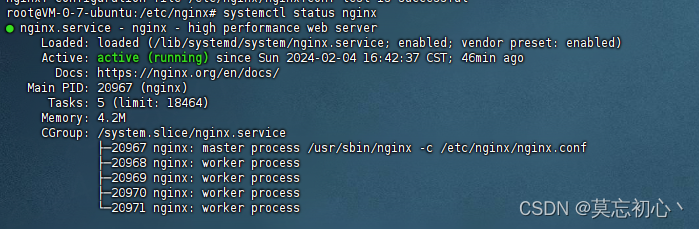
3.ROS相关命令

4.双目相机标定
4.1 说明
4.2 修改相机分辨率和话题频率
(1)分辨率
(2)帧率
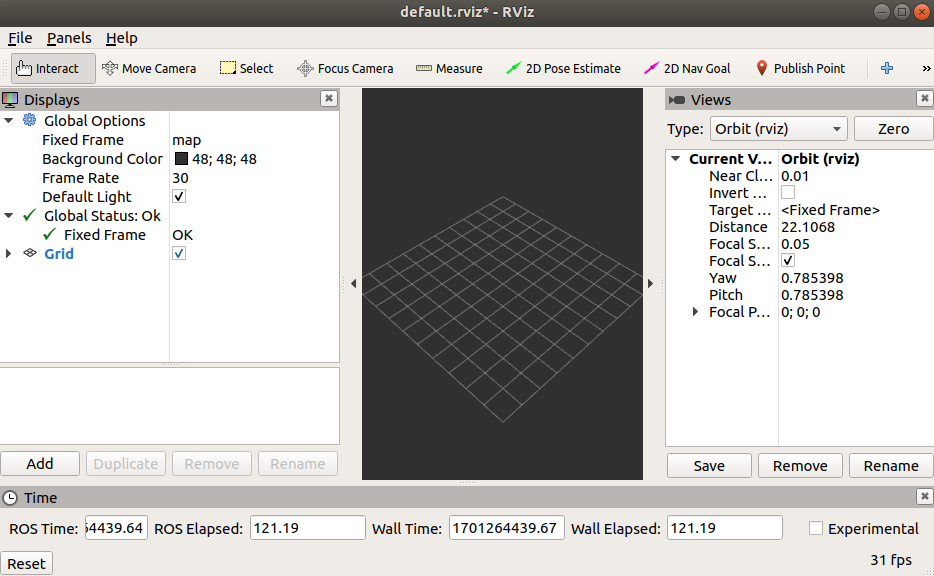
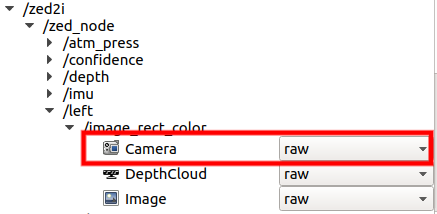
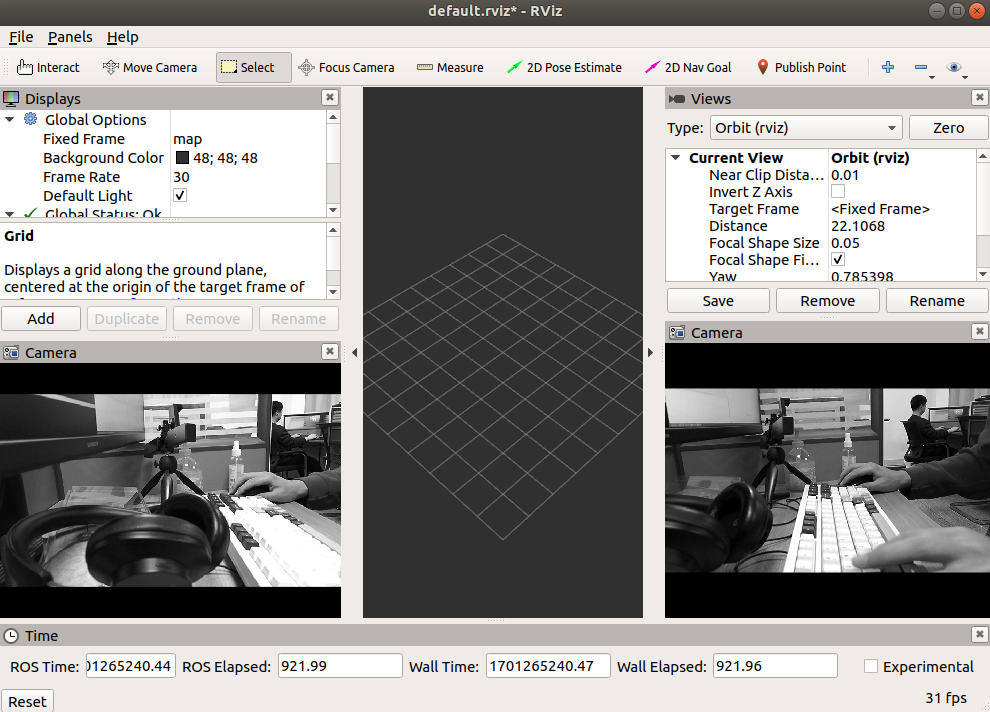
4.3 可视化窗口
声明:本站所有文章,如无特殊说明或标注,均为本站原创发布。任何个人或组织,在未征得本站同意时,禁止复制、盗用、采集、发布本站内容到任何网站、书籍等各类媒体平台。如若本站内容侵犯了原著者的合法权益,可联系我们进行处理。