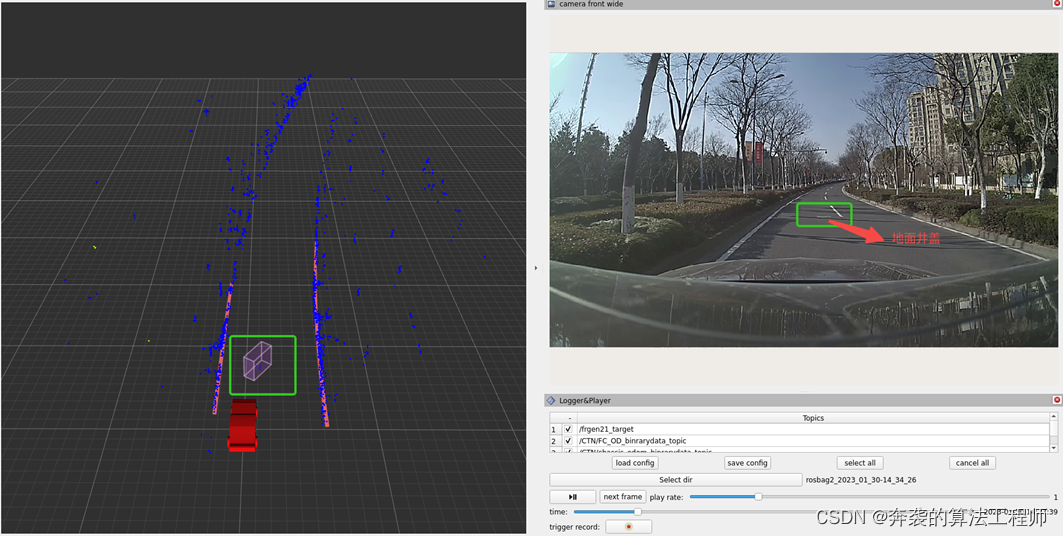
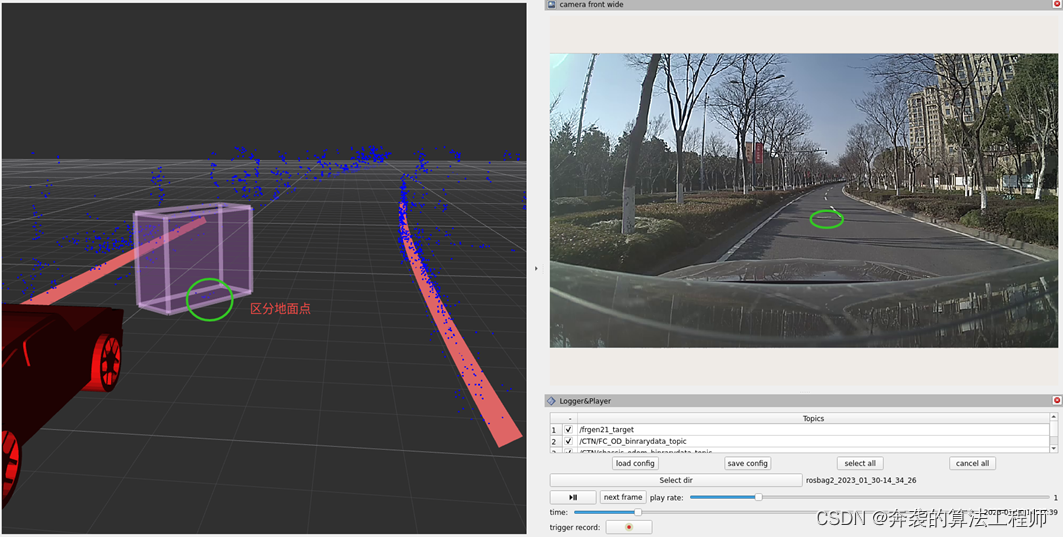
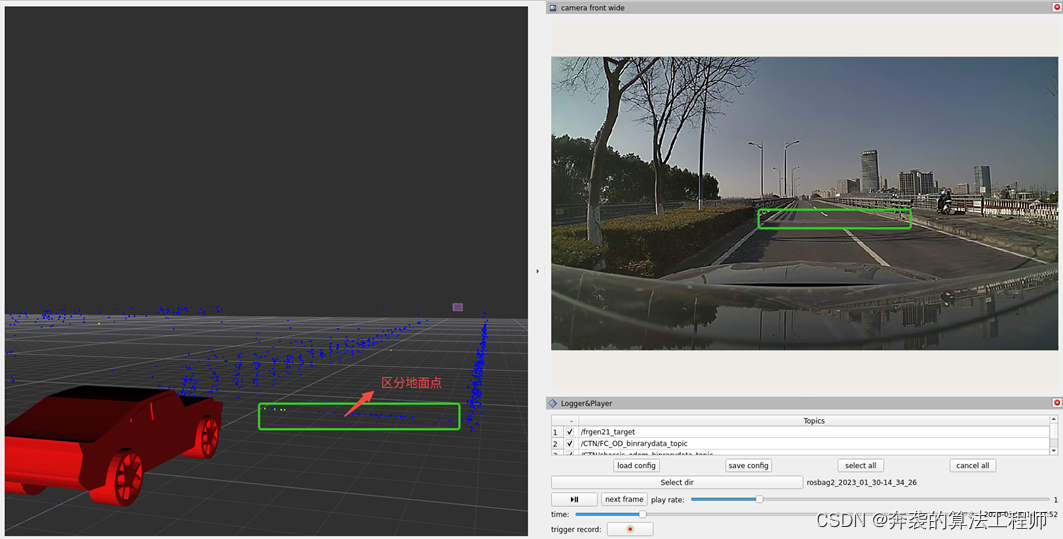
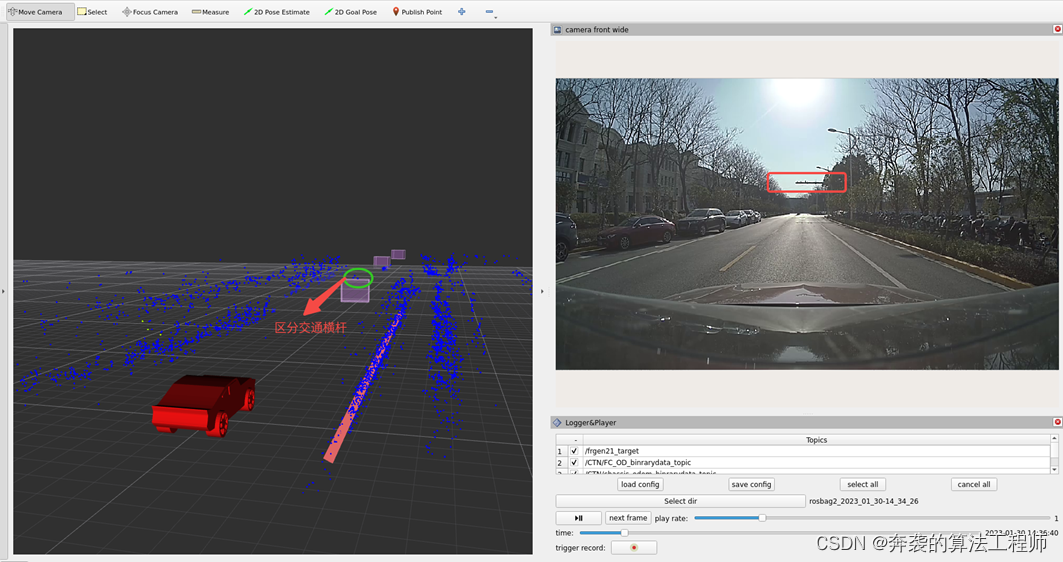
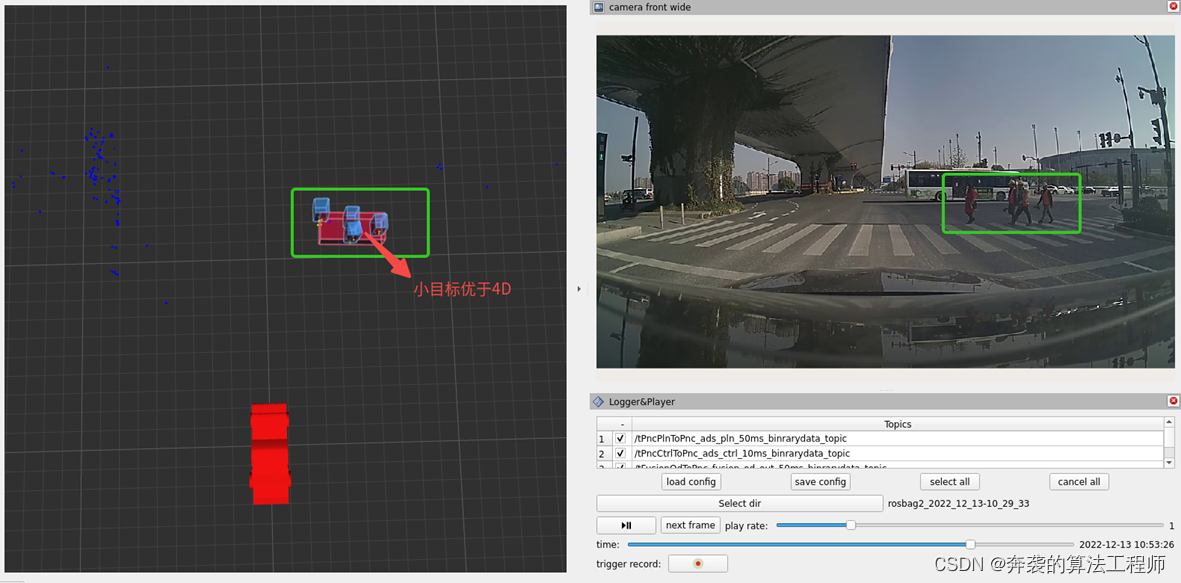
本文介绍: 指示牌和交通杆也是城市道路常见的,下图中408雷达将高处的交通横杆识别为静止目标,但4D雷达的点迹有一定高度,明显高于车辆,会识别为高处点并过滤,不会输出静止目标。当然,指标是抽象的,典型场景的表现更具象,也更有说服力。下图是典型的城市道路,408雷达将前方的窨井盖识别为静止目标并输出,但4D雷达输出点迹判断为地面点直接过滤,不会形成目标,避免了FCW、AEB等误触发。实车测试同步输出激光雷达和4D雷达目标,可以看到激光雷达尺寸朝向优于4D雷达,但远处目标难以检测,不如4D雷达。
1)静止目标和地物杂波混在一起,难以区分;
2) 横穿车辆和行人多普勒为零或很低,难以检测;
3) 高处物体和地面目标不能区分,容易造成误刹,影响安全性;
 典型
典型


声明:本站所有文章,如无特殊说明或标注,均为本站原创发布。任何个人或组织,在未征得本站同意时,禁止复制、盗用、采集、发布本站内容到任何网站、书籍等各类媒体平台。如若本站内容侵犯了原著者的合法权益,可联系我们进行处理。