本文介绍: 在没有任何硬件的情况下,SITL模拟运行Plane、Copter或Rover。提供了一个本地可执行文件(ArduCopter or ArduPlane Desktop Executable, elf),允许在没有硬件的情况下测试代码的行为。该方法比较适合熟悉ardupilot系统,也便于研发人员验证软件算法方面的控制逻辑。如果之前工程有过编译或者编译缺少组件导致失败,可以用以下命令对工程进行清理。第一次运行时,应该使用-w选项擦除虚拟EEPROM,加载正确的默认参数。加载默认参数后,可以正常启动模拟器。
1. 源由
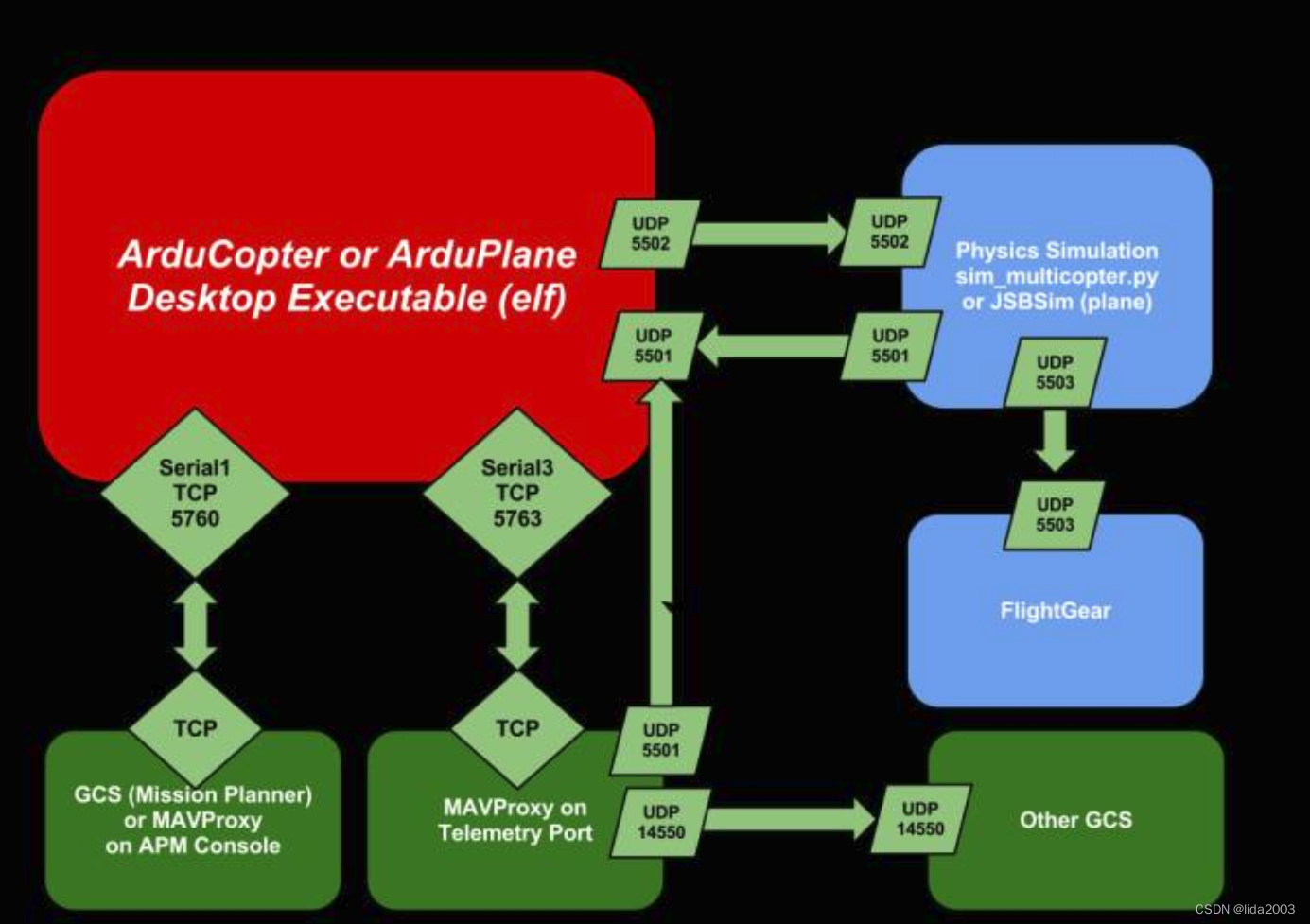
在没有任何硬件的情况下,SITL模拟运行Plane、Copter或Rover。提供了一个本地可执行文件(ArduCopter or ArduPlane Desktop Executable, elf),允许在没有硬件的情况下测试代码的行为。
该方法比较适合熟悉ardupilot系统,也便于研发人员验证软件算法方面的控制逻辑。
2. SITL编译
2.1 准备ubuntu 22.04环境
2.2 更新ubuntu 22.04环境
2.3 克隆最新Ardupilot代码
2.4 submodule同步Ardupilot代码
2.5 Ardupilot-SITL编译准备
2.6 Ardupilot-SITL环境参数
2.7 Ardupilot-SITL编译
3. SITL运行
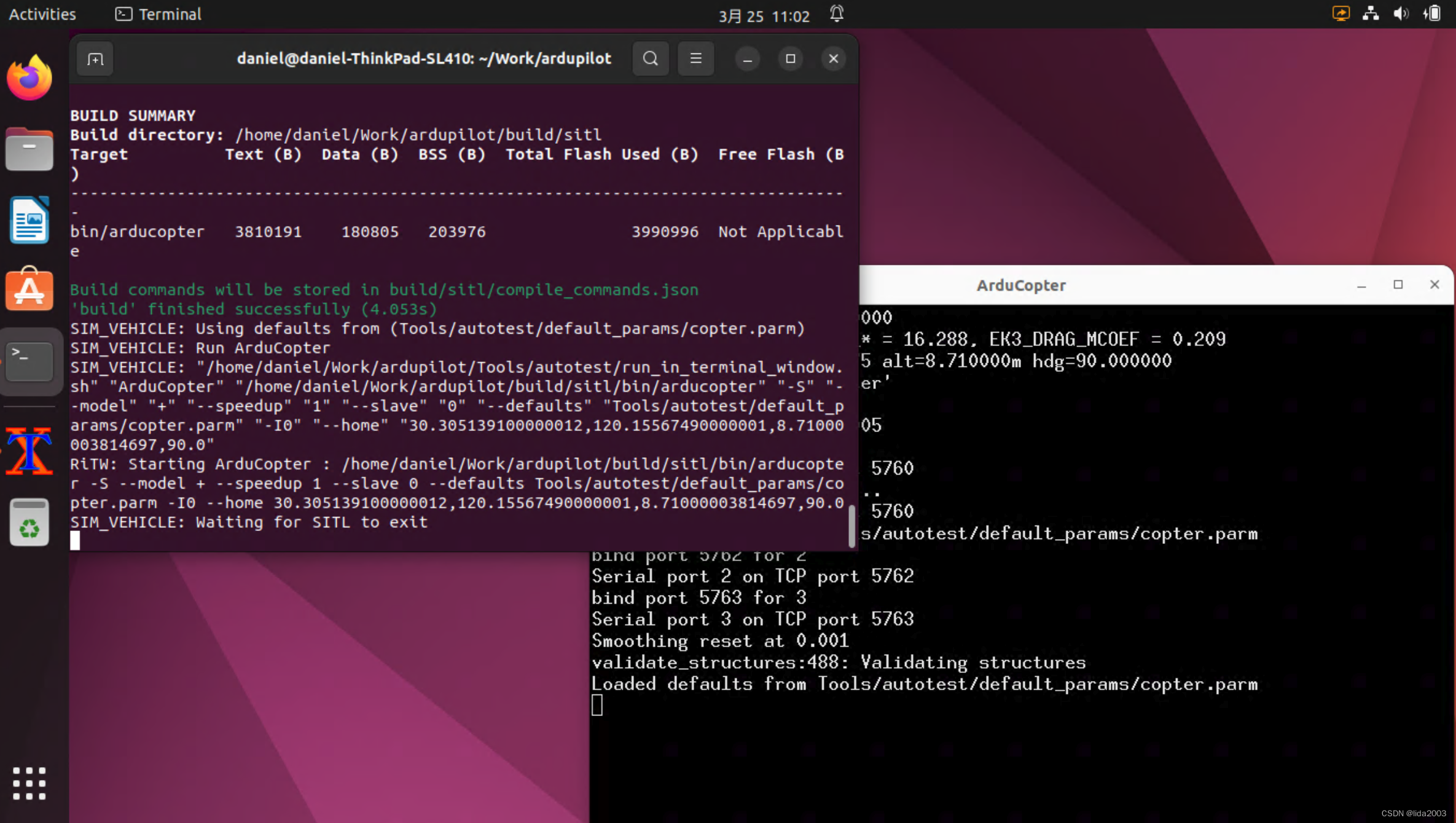
3.1 第一次SITL运行
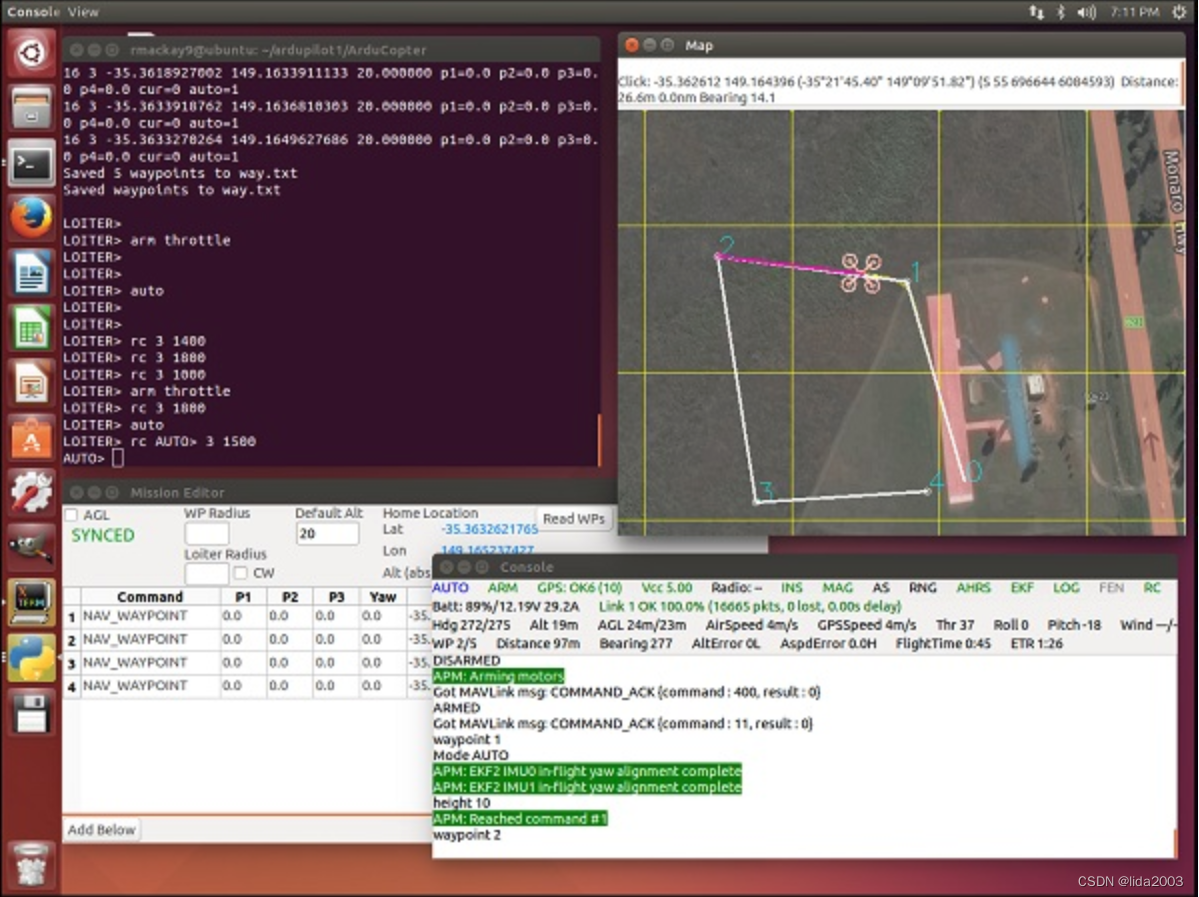
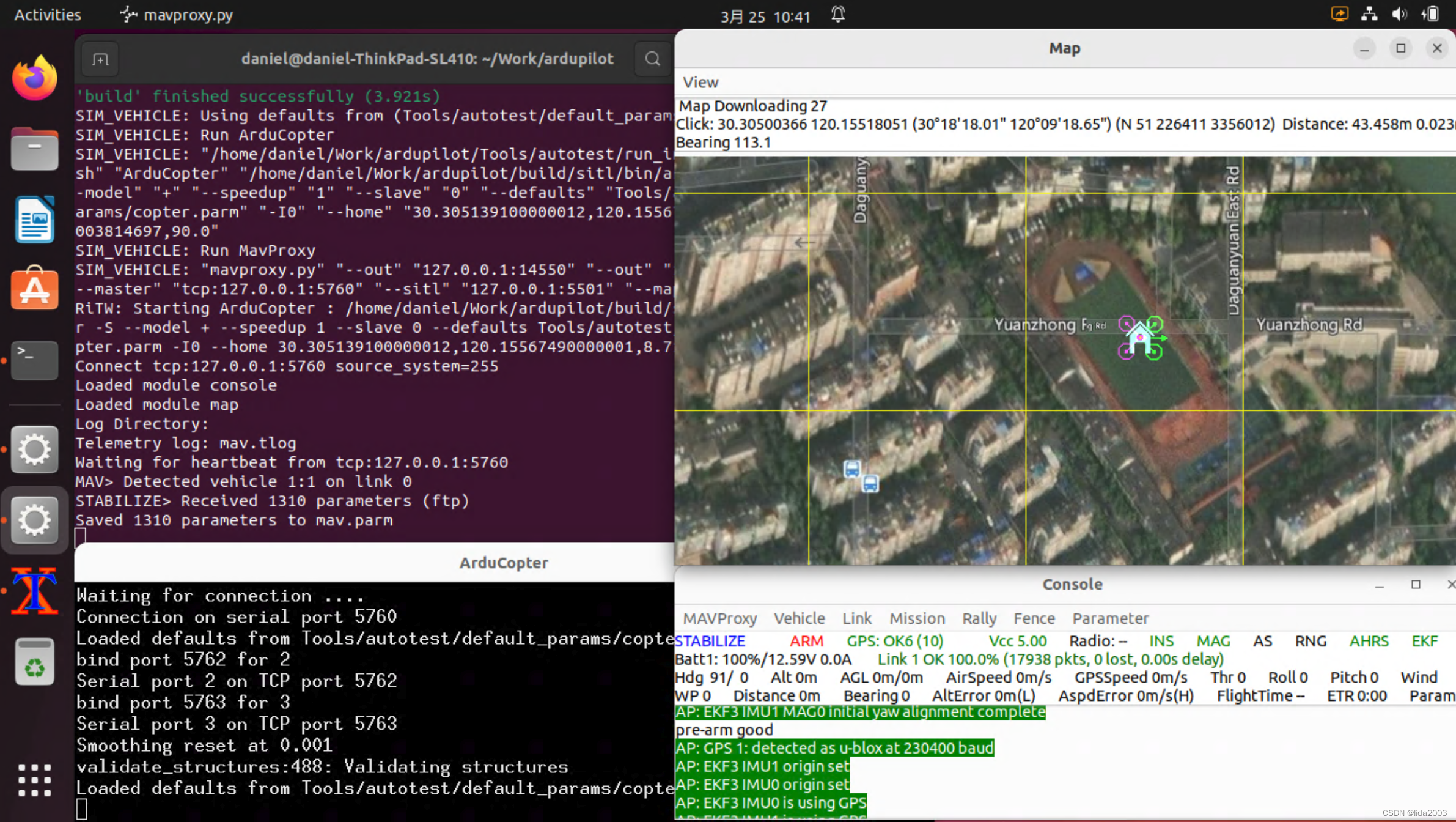
3.2 正常启动SITL模拟器
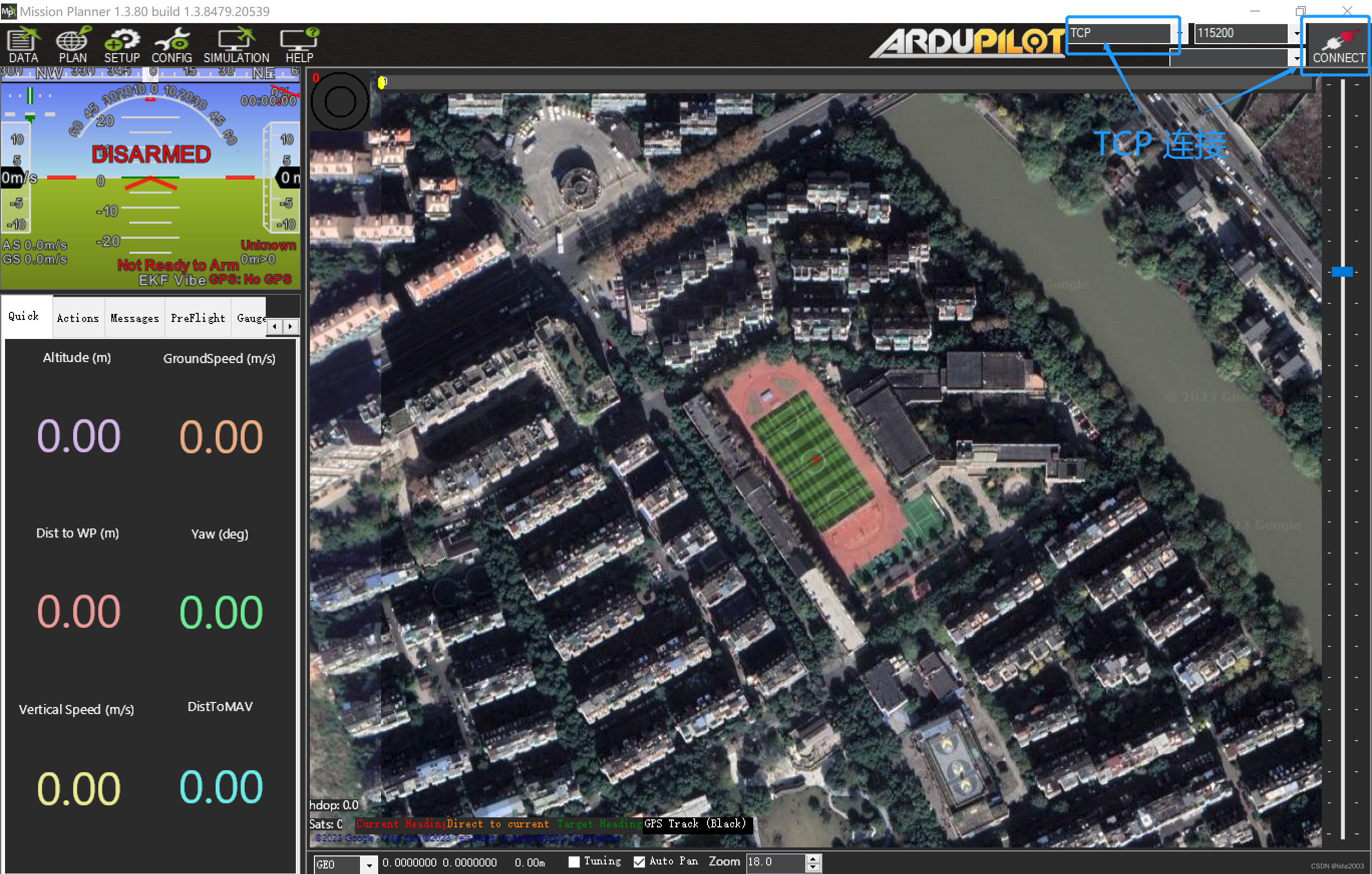
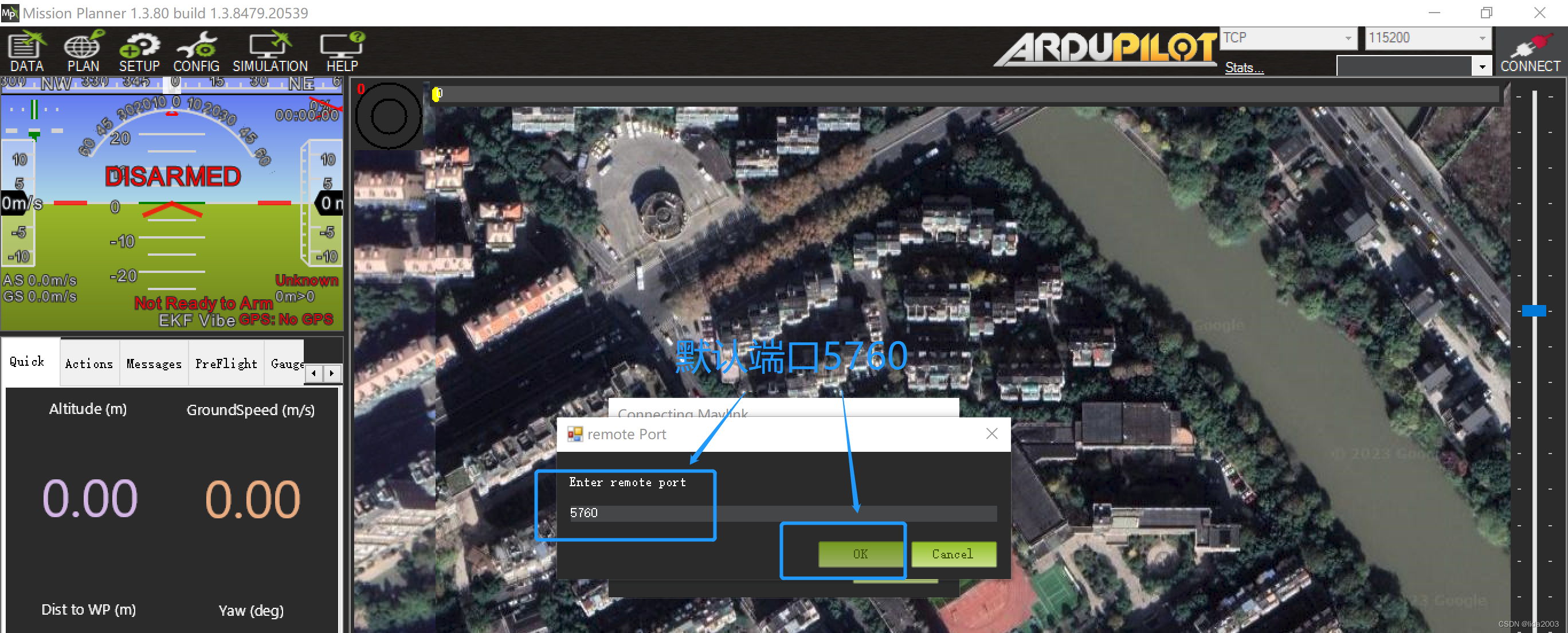
3.3 Mission Planner连接

4. 参考资料
声明:本站所有文章,如无特殊说明或标注,均为本站原创发布。任何个人或组织,在未征得本站同意时,禁止复制、盗用、采集、发布本站内容到任何网站、书籍等各类媒体平台。如若本站内容侵犯了原著者的合法权益,可联系我们进行处理。