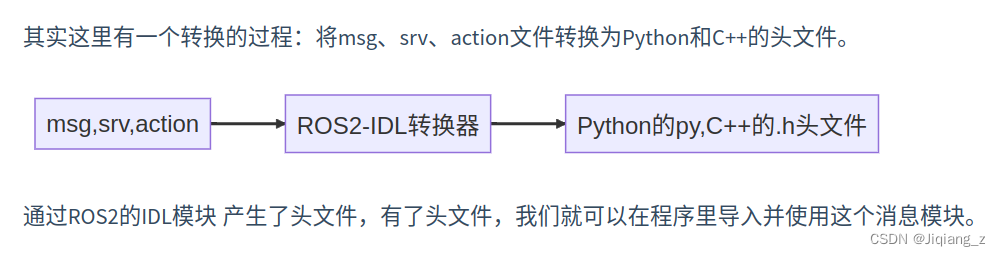
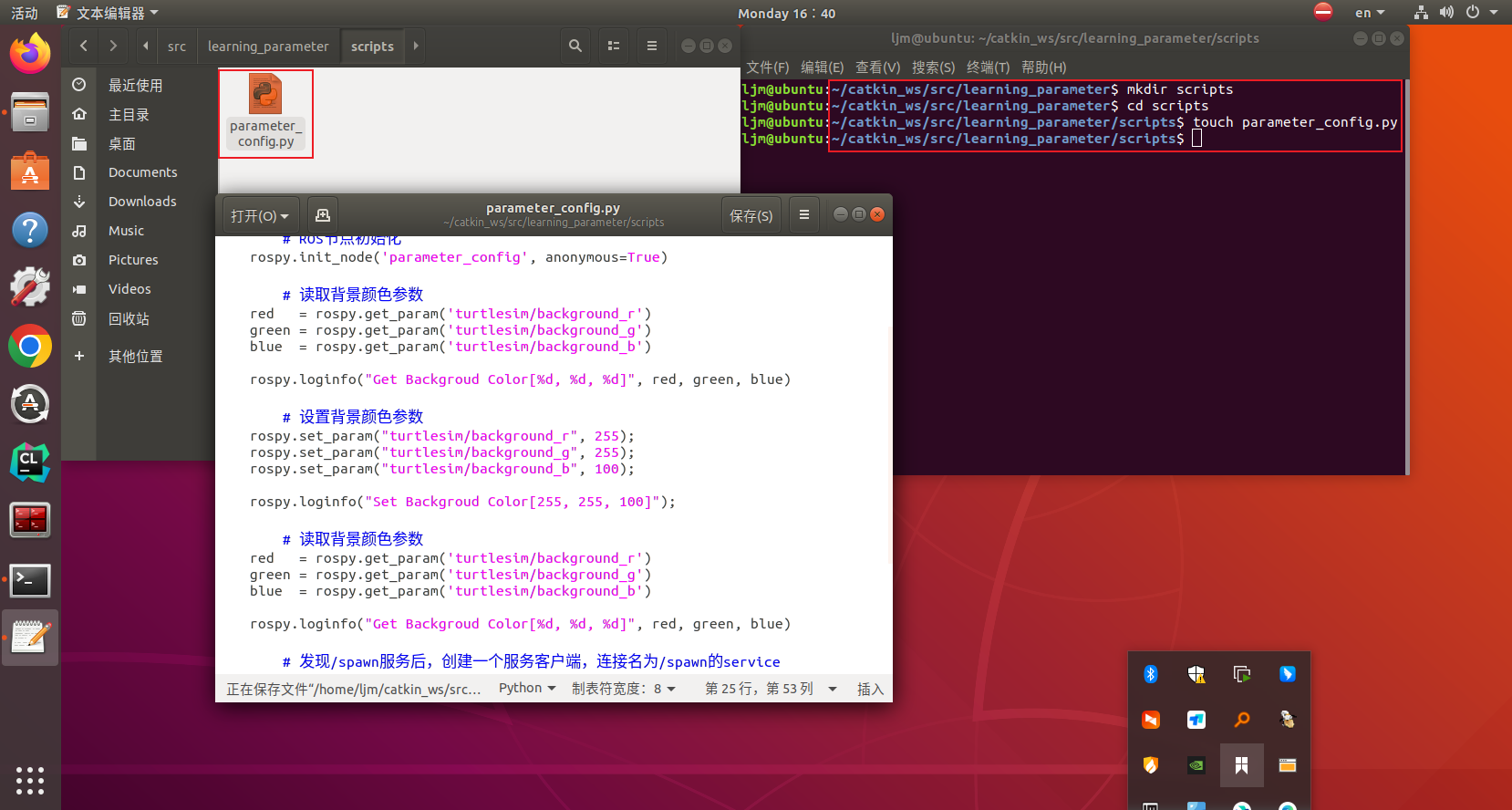
本文介绍: 2. 课程中的所有示例代码均已跑通,且对Pyhon版本的代码也都做了运行验证,并附带验证过程(错误均已修正);# 发现/spawn服务后,创建一个服务客户端,连接名为/spawn的service。// 读取背景颜色参数。// 读取背景颜色参数。
说明:
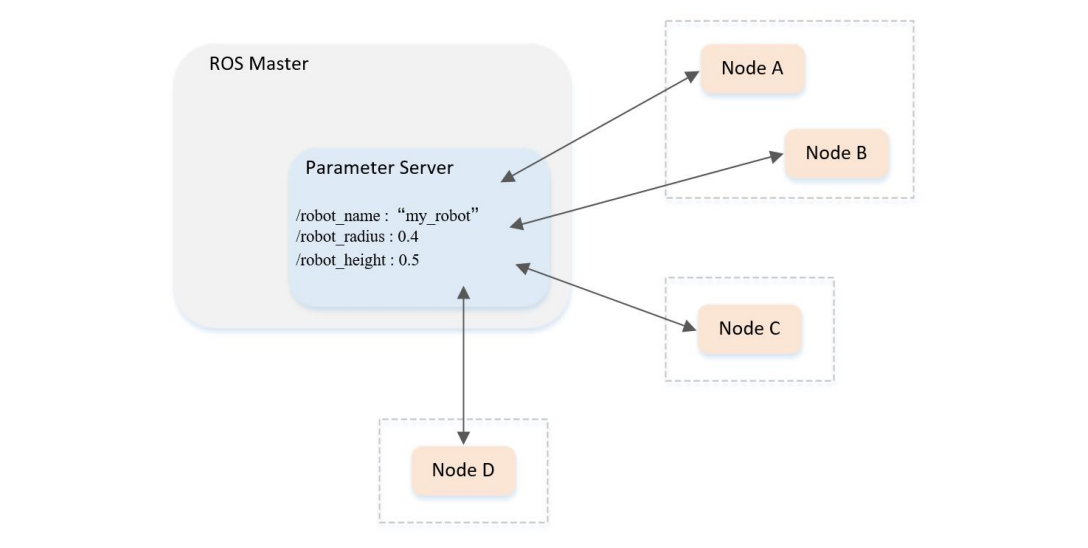
1. 参数模型(全局字典)
2. 实现过程(C++)
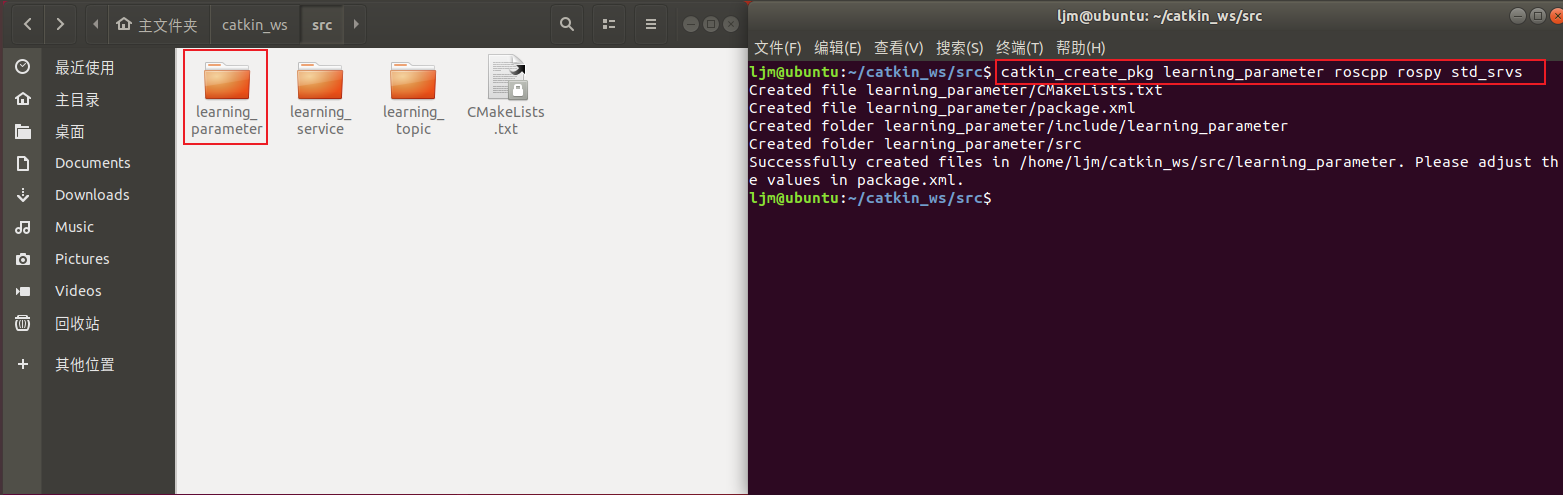
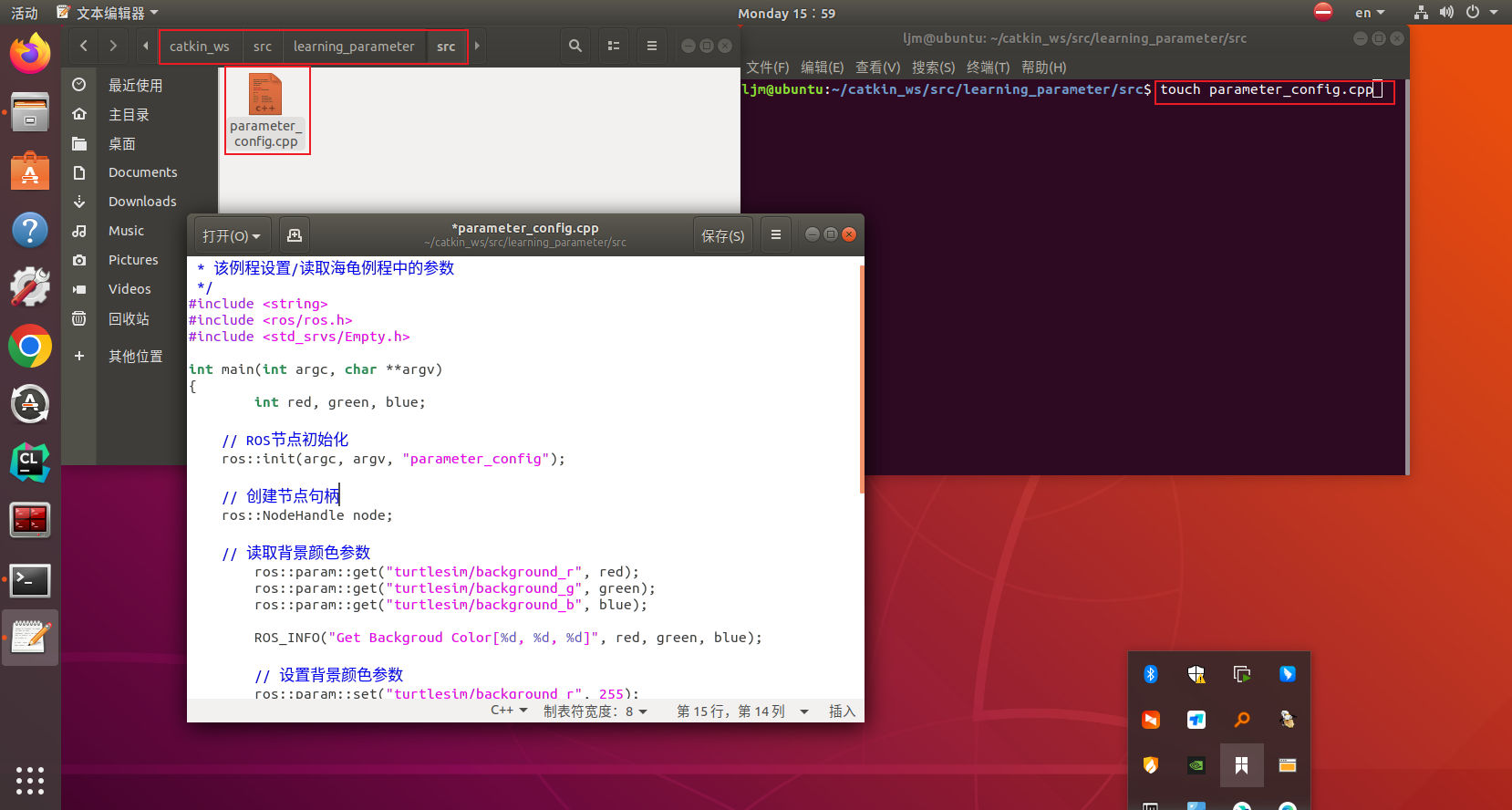
创建功能包
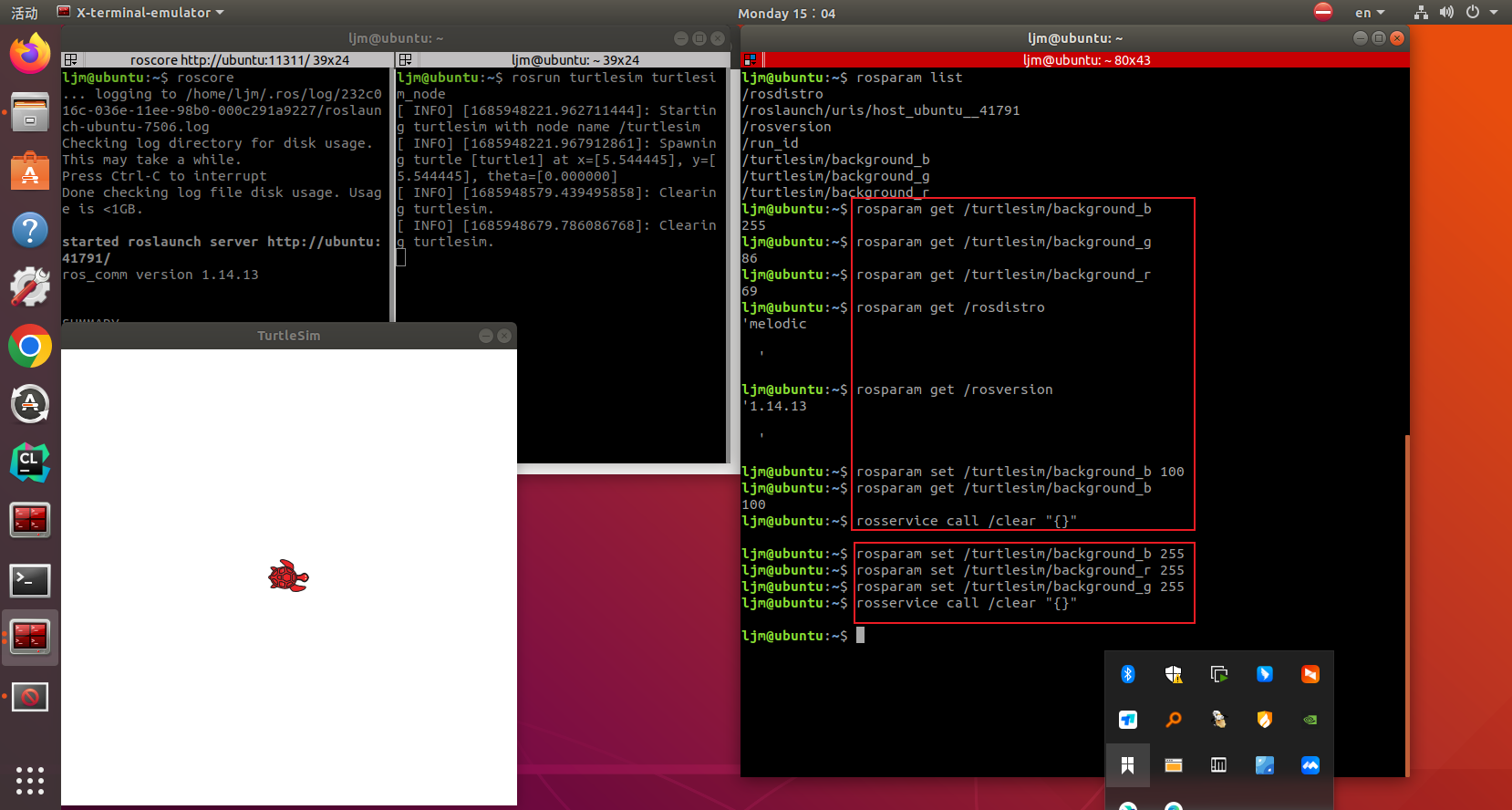
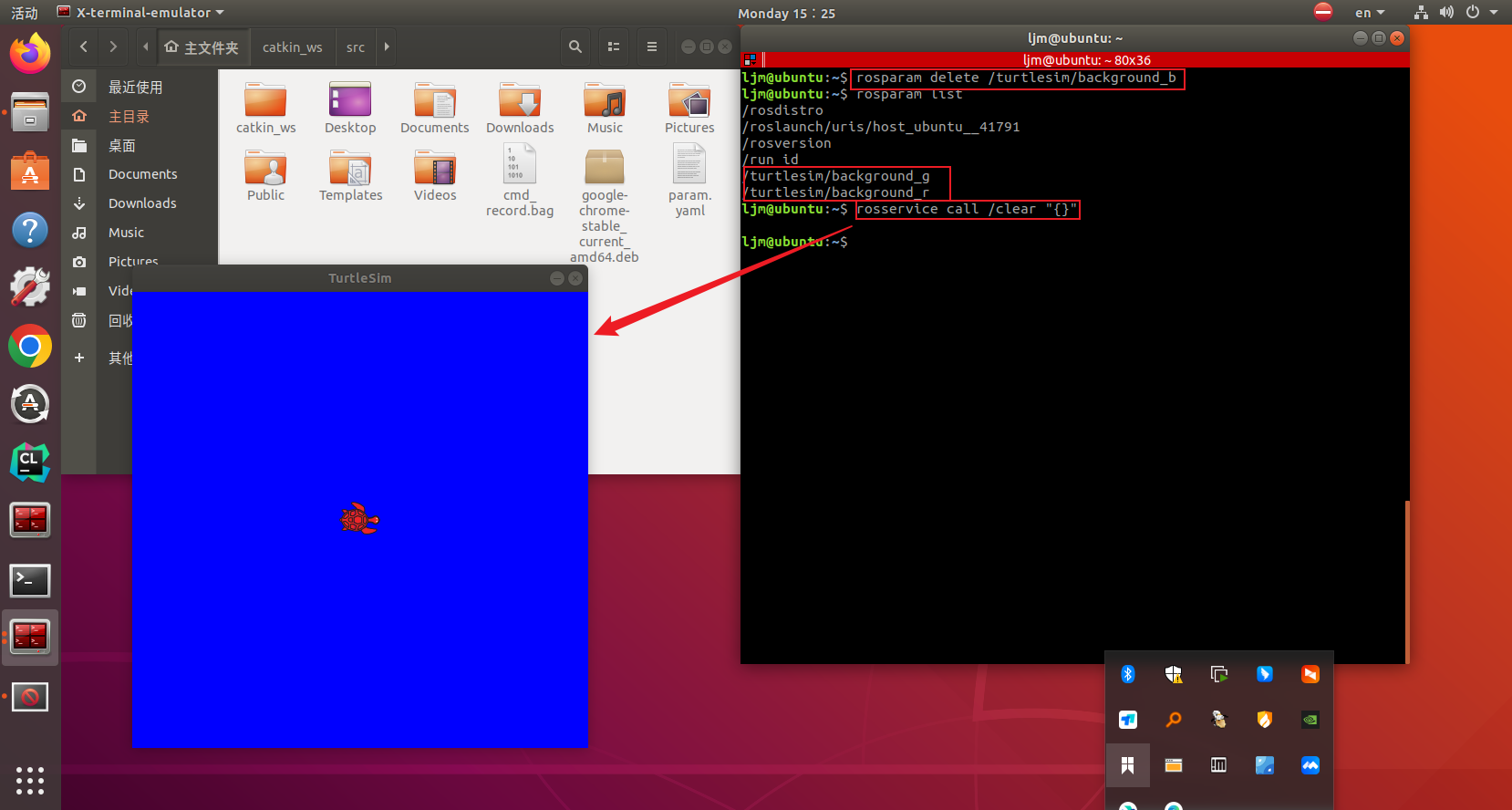
参数命令行的使用
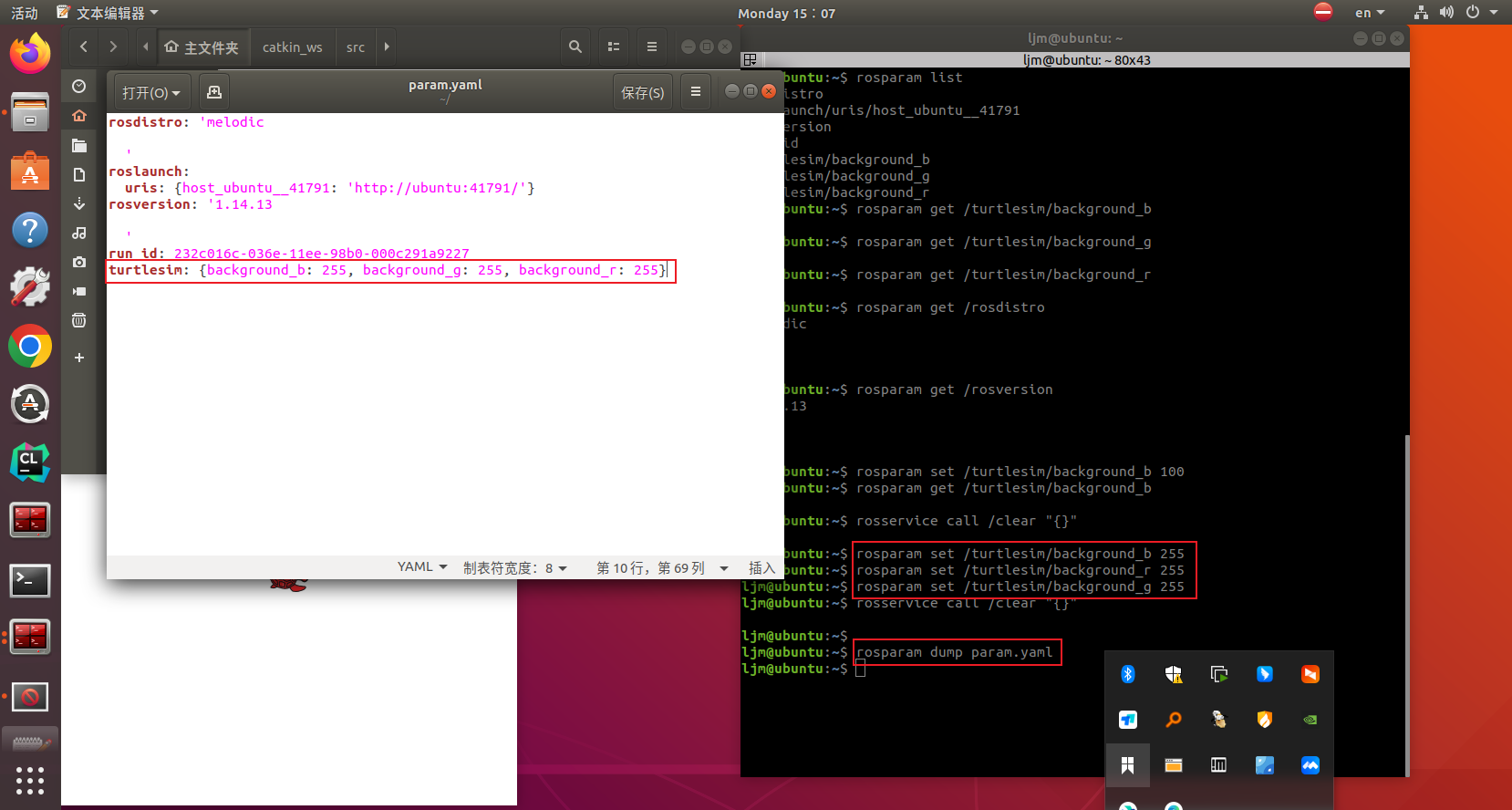
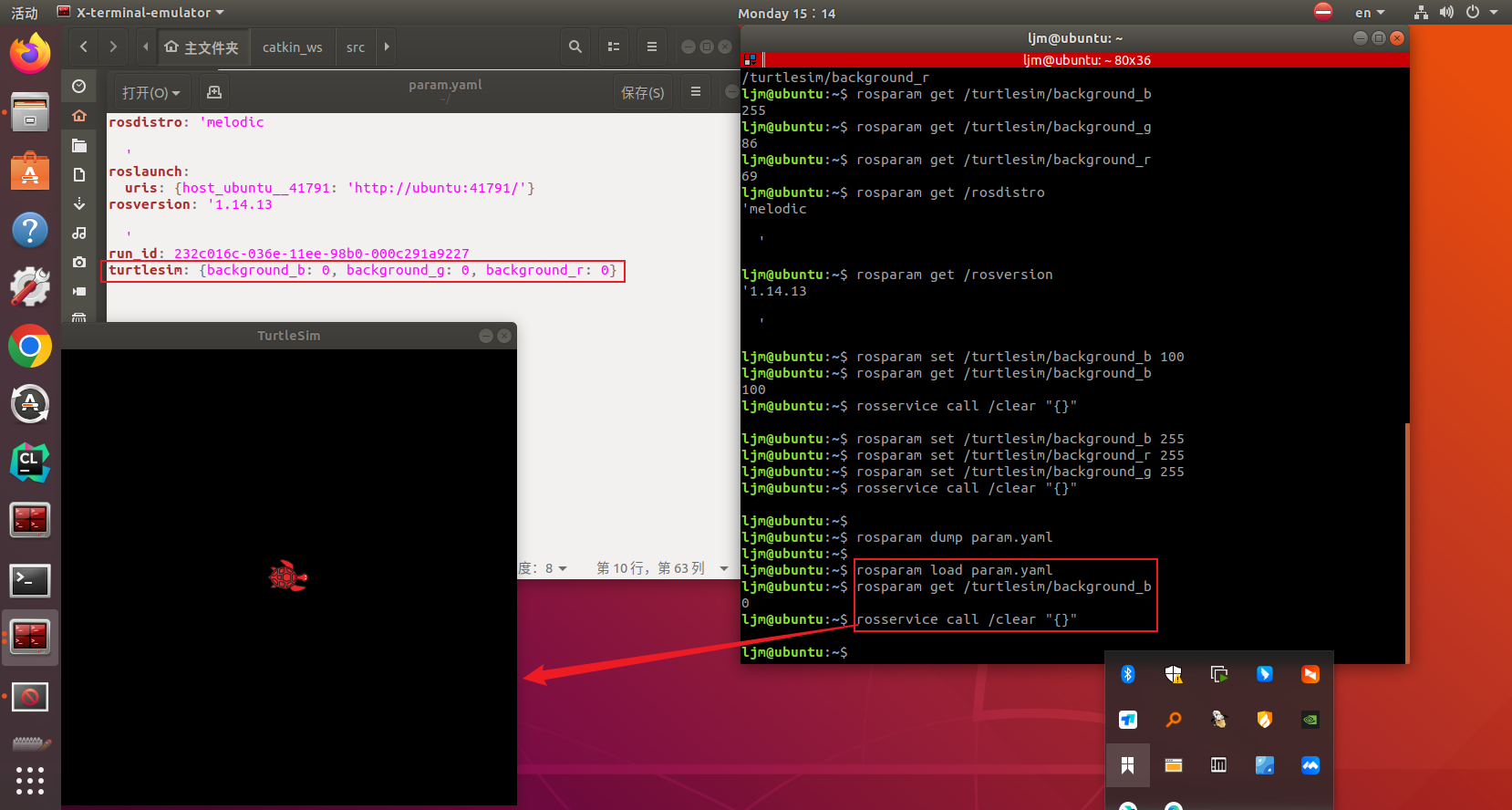
YAML参数文件
rosparam命令
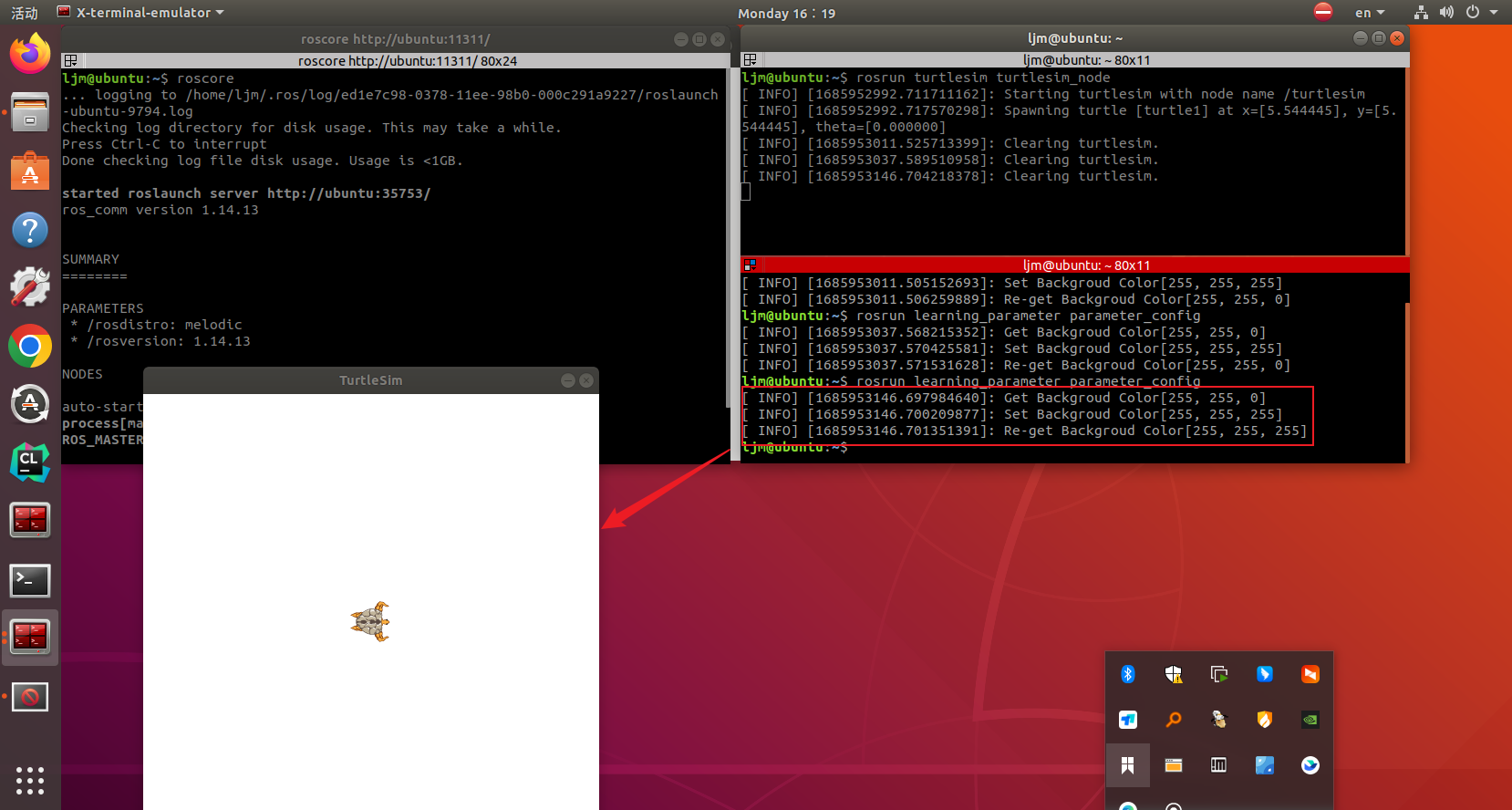
使用示例
编程方法(C++)
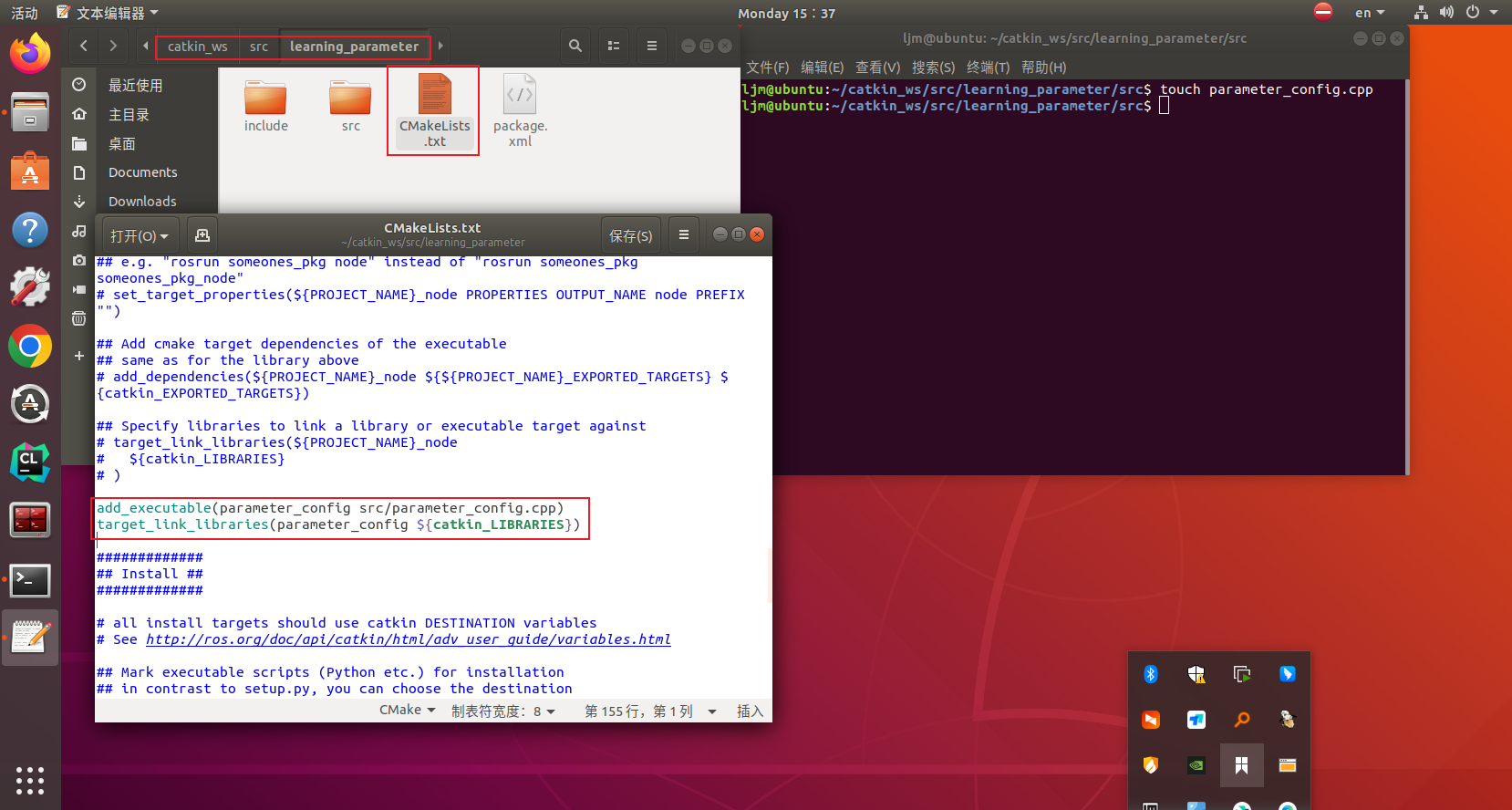
配置代码编译规则
编译并运行
编译
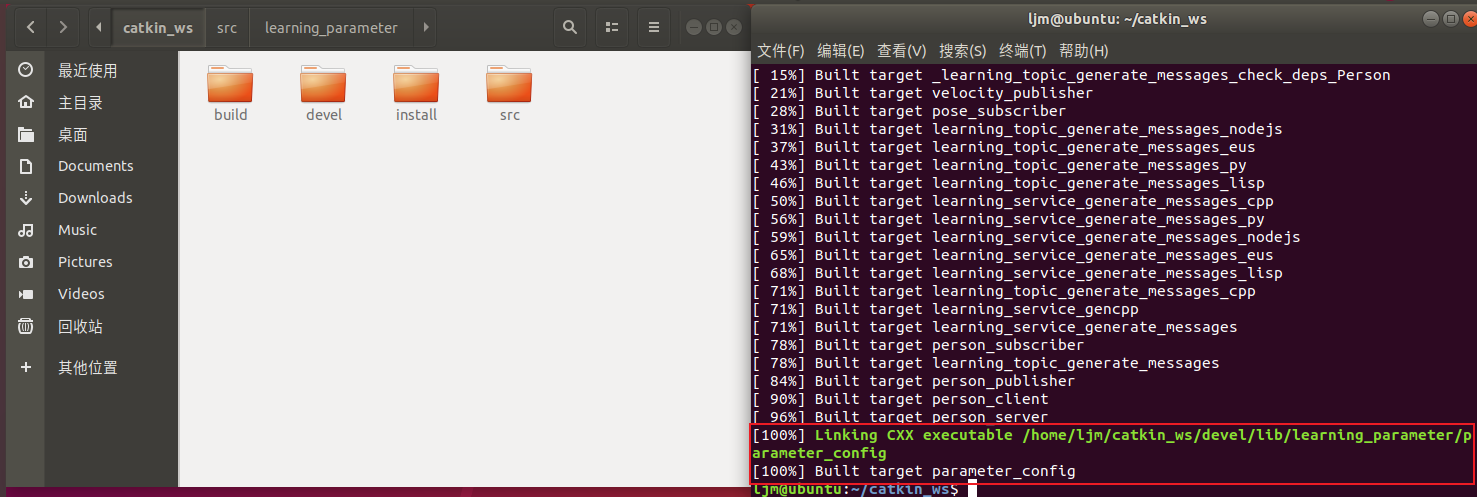
运行
3. 实现过程(Python)
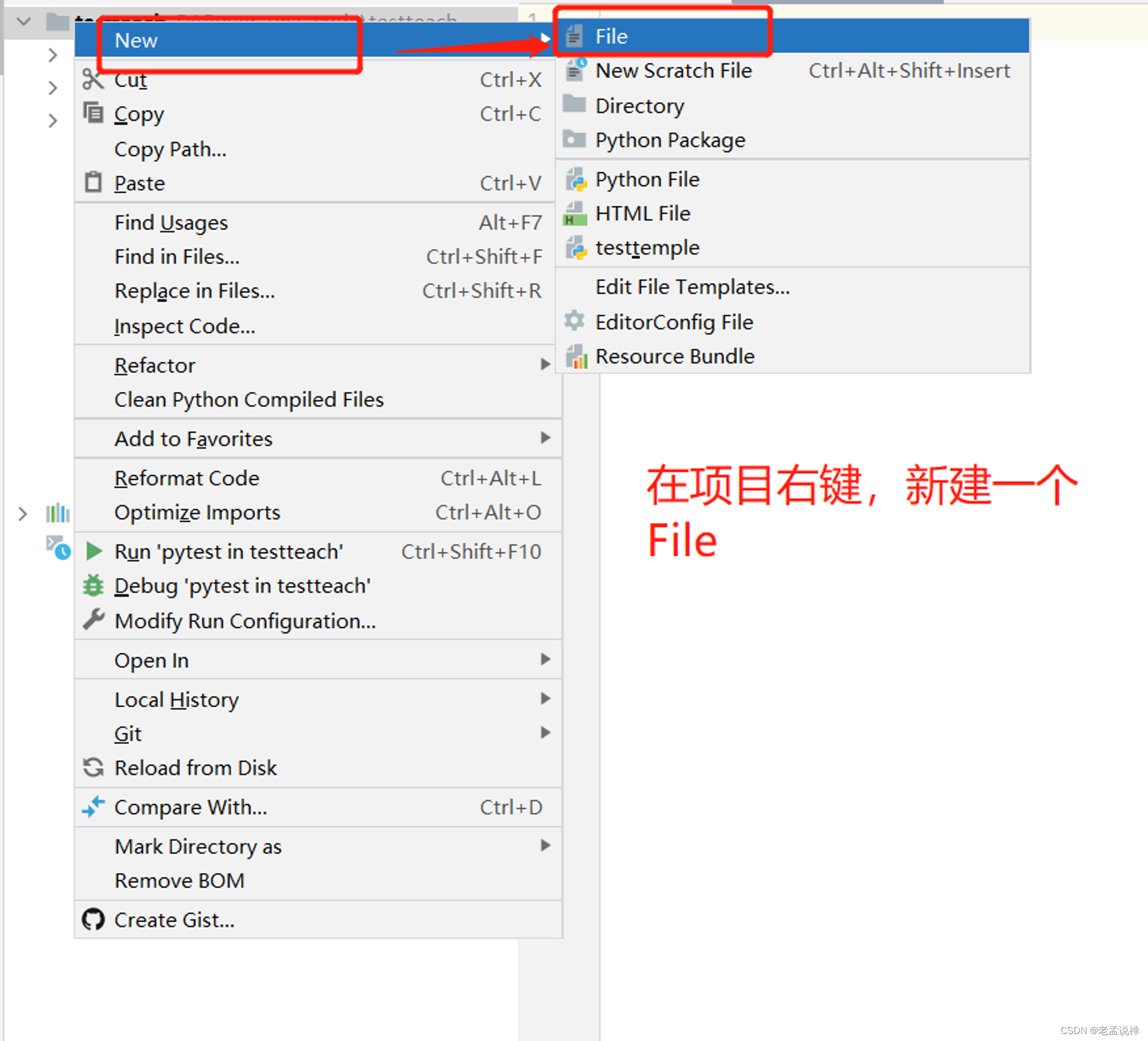
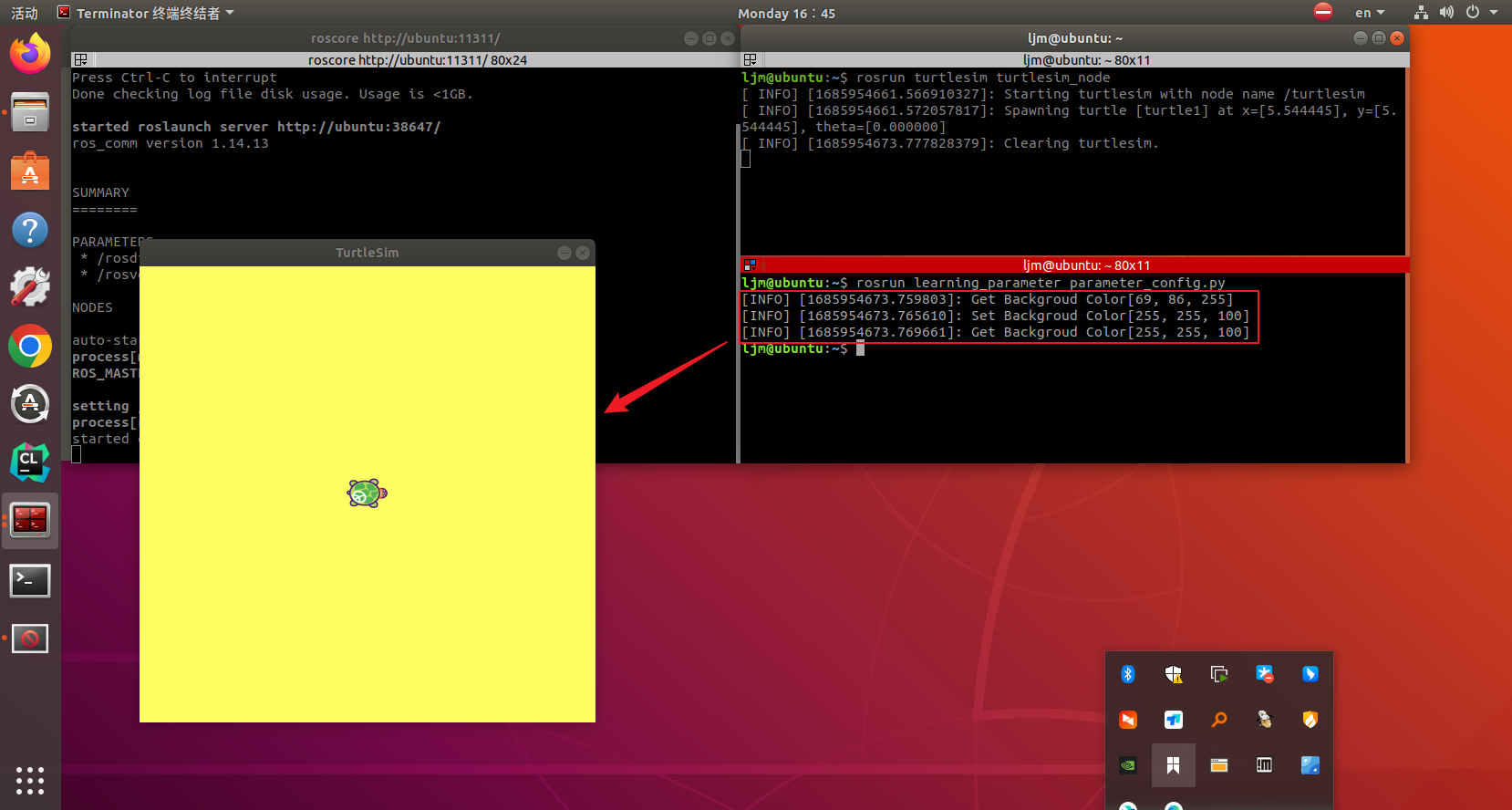
编程方法(Python)

运行效果
声明:本站所有文章,如无特殊说明或标注,均为本站原创发布。任何个人或组织,在未征得本站同意时,禁止复制、盗用、采集、发布本站内容到任何网站、书籍等各类媒体平台。如若本站内容侵犯了原著者的合法权益,可联系我们进行处理。