jetson nano环境配置+yolov5部署+tensorRT加速模型
断断续续地前后花了一个多星期配置环境以及部署模型,期间也报了无数错误,参考了很多文档,求助了身边的朋友,因此尽可能详细的记录一下这个过程。
致谢
此处感谢Xnhyacinth在配置过程中对我的帮助哈哈哈꒰ঌ( ⌯’ ‘⌯)໒꒱
主机和jetson nano环境
我主机上的环境是python3.9,cuda11.6
jetson nano环境jetpack4.6,cuda10.2,python3.6(conda)

jetson系统开机烧录、系统设置、换源
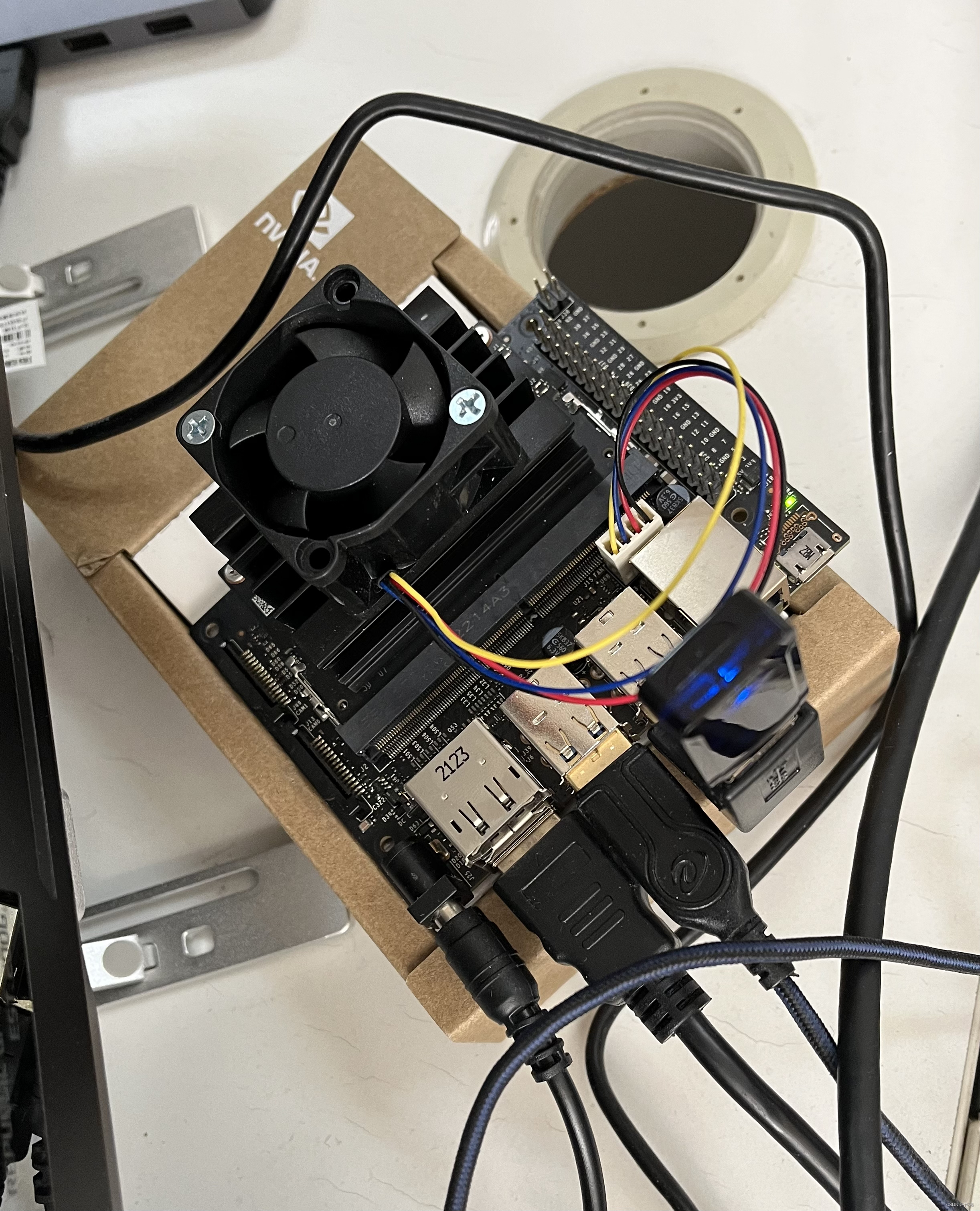
先熟悉各个接口及其功能,具体可参考NVIDIA官方文档(见下文)先组装好买来的风扇,准备好无线网卡,我用的是即插即用的usb版本的无线网卡,JD上有卖,组装时发现jetson nano开发板上有一个跳线帽,那里默认是没有短接的,这样的话只能连接电脑电源,必须先把跳线帽短接才能连接直流电源。
NVIDIA jetson nano官网
刚开始的烧录,sd卡格式化以及相关工作都是对照这个来的,基本没什么问题。完成之后就可以得到一个Ubuntu18.04的系统,然后如果有无线网卡可以直接连接WiFi,我后面一般都是通过xshell连接开发板,直接在主机操作,除了需要查看图片或者视频的时候才接屏幕。
这个阶段我还部分参考了以下文档,在此做一个记录不赘述了。
Nvidia Jetson Nano介绍与使用指南
Jetson Nano 从入门到实战(案例:Opencv配置、人脸检测、二维码检测)这篇文章我主要参考了2.4.1到2.4.3的部分,配置了一些系统环境并换源,因为不换源下载东西速度可能比较慢,具体如何换源的网上资料很多,可以自行查阅。
python环境配置
刚开始我没有用虚拟环境,自带的环境里是python2.7,先下载3.6,又在环境里装了torch,花了好几天所有环境全部装完到最后跑yolov5的时候还是报错,然后请教了其他人,让我安装conda的虚拟环境,于是从头再来,重新装conda环境。前面的坑我就不说了,我们直接安装conda环境。建议卡在这里的也可以直接使用conda环境,确实方便很多。



![[C#]winform部署yolov7+CRNN实现车牌颜色识别车牌号检测识别](https://img-blog.csdnimg.cn/direct/c12aefab36e342e7a127f6e953ac3905.jpeg)


