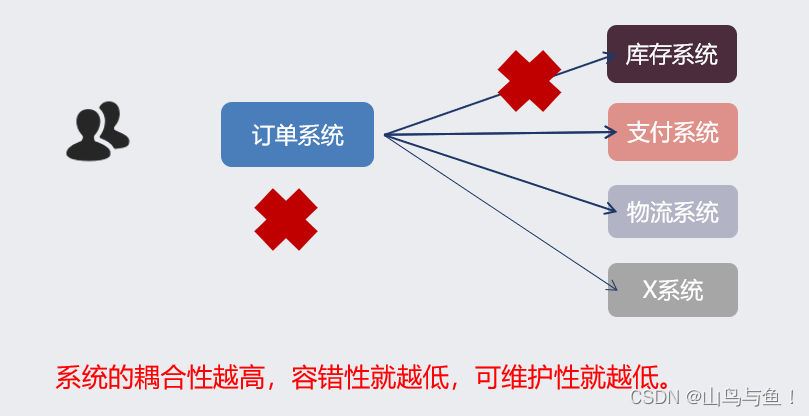
分布式协同仿真是一种在分布式计算环境中进行协同工作的仿真方法。使用该方法进行协同仿真时,仿真任务将被分发到多个计算节点上,并且这些节点可以同时工作以模拟完整的系统行为。分布式协同仿真已被广泛应用于工程、科学和军事领域,以便更好地模拟和理解大规模和复杂系统的行为。
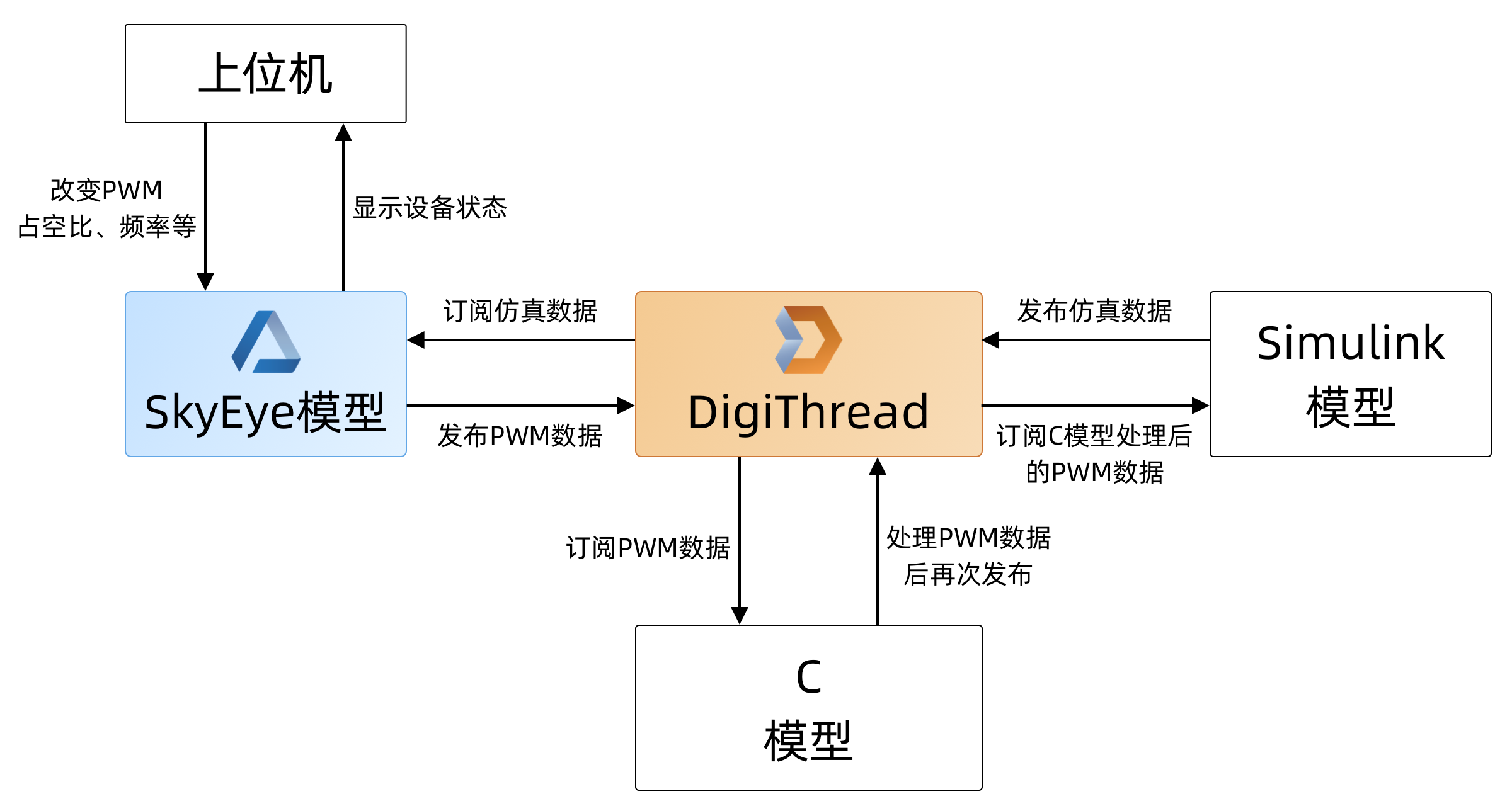
1.集成多学科仿真模型: 分布式协同仿真能够集成来自机械、电气、电子、控制、通信等多个学科领域的仿真模型,是其核心特点之一。
2.分布式计算: 仿真模型在分布式计算环境中运行,可以分布在不同的计算节点上,使系统能够更高效地处理大规模、复杂的仿真任务。
3.协同仿真: 不同领域的仿真模型能够协同工作,实时共享仿真结果和数据,有助于更全面地理解系统的交互作用和影响。

声明:本站所有文章,如无特殊说明或标注,均为本站原创发布。任何个人或组织,在未征得本站同意时,禁止复制、盗用、采集、发布本站内容到任何网站、书籍等各类媒体平台。如若本站内容侵犯了原著者的合法权益,可联系我们进行处理。