1.常用函数介绍
0 设备准备
device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")
这行代码是用来选择设备的,根据是否有可用的 CUDA 设备来选择使用 GPU 还是 CPU 进行计算。
-
torch.cuda.is_available():这个函数用来检查是否有可用的 CUDA 设备。如果返回True,表示有可用的 CUDA 设备;如果返回False,表示没有可用的 CUDA 设备。 -
"cuda:0"和"cpu":这是设备的标识符。"cuda:0"表示选择第一个可用的 CUDA 设备,而"cpu"表示选择 CPU 设备。 -
device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu"):这行代码使用了条件语句,如果有可用的 CUDA 设备,则选择"cuda:0",否则选择"cpu"。然后将选择的设备赋值给device变量。
这行代码的作用是根据是否有可用的 CUDA 设备来选择使用 GPU 还是 CPU 进行计算。在后续的代码中,可以使用 device 变量来指定模型和张量所在的设备,以便进行相应的计算。例如:
model = YourModel().to(device)
input_tensor = input_tensor.to(device)
这样就可以将模型和输入数据都移动到指定的设备上进行计算。如果有可用的 CUDA 设备,计算将在 GPU 上进行;如果没有可用的 CUDA 设备,计算将在 CPU 上进行。
1.1 数据集
1.1.1数据集对象创建
在PyTorch中,数据集对象通常继承自torch.utils.data.Dataset类。创建数据集对象时,需要重写__len__()和__getitem__()方法。下面是一个创建自定义数据集对象的示例:
import torch
from torch.utils.data import Dataset
class MyDataset(Dataset):
def __init__(self, data):
self.data = data
def __len__(self):
return len(self.data)
def __getitem__(self, index):
x = self.data[index][0]
y = self.data[index][1]
return x, y
#测试用例
data = [(torch.randn(10), torch.randint(0, 2, (1,))) for _ in range(100)]
dataset = MyDataset(data)
在这个例子中,我们创建了一个名为MyDataset的自定义数据集类,它继承自torch.utils.data.Dataset类。
- 在
__init__()方法中,我们接收一个数据列表data,并将其存储在类属性self.data中。 __len__()方法返回数据集的长度,即len(self.data)。__getitem__()方法根据索引index返回数据集中的一个样本。
在这个例子中,我们假设每个样本由一个特征向量和一个标签组成,所以我们从数据列表中取出特征向量和标签,并将其作为返回值。我们创建了一个包含100个样本的数据集,每个样本由一个10维的特征向量和一个0到1之间的二进制标签组成。然后,我们将这个数据集传递给MyDataset类,创建一个数据集对象。
1.1.2 数据集划分
在 PyTorch 中,可以使用 torch.utils.data.random_split() 函数来随机划分数据集。
下面是一个示例代码,展示了如何使用 random_split() 函数随机划分数据集:
from torch.utils.data import random_split
# 创建一个数据集对象
dataset = ...
# 计算数据集的大小
dataset_size = len(dataset)
# 计算训练集和验证集的大小
train_size = int(0.8 * dataset_size)
val_size = dataset_size - train_size
# 使用 random_split() 函数随机划分数据集
train_dataset, val_dataset = random_split(dataset, [train_size, val_size])
在这个例子中,我们首先创建了一个数据集对象 dataset。然后,我们计算了数据集的大小 dataset_size。接下来,我们计算了训练集和验证集的大小,并将它们分别设置为 train_size 和 val_size。最后,我们使用 random_split() 函数将数据集随机划分为训练集和验证集,并将它们分别存储在 train_dataset 和 val_dataset 变量中。
需要注意的是,random_split() 函数会打乱数据集的顺序。因此,划分的训练集和验证集的顺序是随机的。
1.1.3 数据集加载器
在PyTorch中,可以使用torch.utils.data.DataLoader类加载数据集。下面是一个使用DataLoader加载自定义数据集的示例:
# 创建数据加载器
dataloader = DataLoader(dataset, batch_size=10, shuffle=True)
# 使用数据加载器
for batch_idx, (inputs, targets) in enumerate(dataloader):
print(f"Batch {batch_idx}:")
print(f" Inputs: {inputs.shape}")
print(f" Targets: {targets.shape}")
使用torch.utils.data.DataLoader类将其转换为数据加载器dataloader。DataLoader类需要两个参数:数据集对象dataset和批次大小batch_size。shuffle参数设置为True,表示在训练过程中对数据进行随机打乱。
最后,我们使用for循环遍历数据加载器,并每次从数据加载器中获取一个批次的数据,将其存储在inputs和targets变量中。我们可以使用print()函数输出每个批次的数据形状。在这个例子中,我们假设每个批次的大小为10,并且每个样本的特征向量大小为10,新的二进制标签大小为1。
1.2卷积网络结构
1.2.1 参数配置
-
torch.nn.ReLU:
1.2.2代码实例
- torch.nn.Linear:
import torch
import torch.nn as nn
# 创建一个线性层,输入特征大小为10,输出特征大小为5
linear_layer = nn.Linear(10, 5)
# 创建一个随机输入张量
input_tensor = torch.randn(3, 10)
# 将输入张量传递给线性层进行线性变换
output = linear_layer(input_tensor)
print(output.shape) # 输出: torch.Size([3, 5])
- torch.nn.Conv2d:
import torch
import torch.nn as nn
# 创建一个二维卷积层,输入通道数为3,输出通道数为16,卷积核大小为3x3
conv_layer = nn.Conv2d(3, 16, kernel_size=3)
# 创建一个随机输入张量,大小为(batch_size, channels, height, width)
input_tensor = torch.randn(4, 3, 32, 32)
# 将输入张量传递给卷积层进行卷积操作
output = conv_layer(input_tensor)
print(output.shape) # 输出: torch.Size([4, 16, 30, 30])
- torch.nn.ConvTranspose2d:
import torch
import torch.nn as nn
# 创建一个二维转置卷积层,输入通道数为16,输出通道数为8,卷积核大小为4x4
conv_transpose_layer = nn.ConvTranspose2d(16, 8, kernel_size=4)
# 创建一个随机输入张量,大小为(batch_size, channels, height, width)
input_tensor = torch.randn(4, 16, 14, 14)
# 将输入张量传递给转置卷积层进行转置卷积操作
output = conv_transpose_layer(input_tensor)
print(output.shape) # 输出: torch.Size([4, 8, 17, 17])
- torch.nn.MaxPool2d:
import torch
import torch.nn as nn
# 创建一个二维最大池化层,池化窗口大小为2x2
maxpool_layer = nn.MaxPool2d(kernel_size=2)
# 创建一个随机输入张量,大小为(batch_size, channels, height, width)
input_tensor = torch.randn(4, 3, 32, 32)
# 将输入张量传递给最大池化层进行池化操作
output = maxpool_layer(input_tensor)
print(output.shape) # 输出: torch.Size([4, 3, 16, 16])
- torch.nn.AvgPool2d:
import torch
import torch.nn as nn
# 创建一个二维平均池化层,池化窗口大小为2x2
avgpool_layer = nn.AvgPool2d(kernel_size=2)
# 创建一个随机输入张量,大小为(batch_size, channels, height, width)
input_tensor = torch.randn(4, 3, 32, 32)
# 将输入张量传递给平均池化层进行池化操作
output = avgpool_layer(input_tensor)
print(output.shape) # 输出: torch.Size([4, 3, 16, 16])
- torch.nn.BatchNorm2d:
import torch
import torch.nn as nn
# 创建一个二维批归一化层,输入特征通道数为3
batchnorm_layer = nn.BatchNorm2d(3)
# 创建一个随机输入张量,大小为(batch_size, channels, height, width)
input_tensor = torch.randn(4, 3, 32, 32)
# 将输入张量传递给批归一化层进行归一化操作
output = batchnorm_layer(input_tensor)
print(output.shape) # 输出: torch.Size([4, 3, 32, 32])
- torch.nn.ReLU:
import torch
import torch.nn as nn
# 创建一个ReLU激活函数
relu = nn.ReLU()
# 创建一个随机输入张量
input_tensor = torch.randn(3, 5)
# 将输入张量传递给ReLU激活函数进行非线性变换
output = relu(input_tensor)
print(output)
- torch.nn.Dropout:
import torch
import torch.nn as nn
# 创建一个随机失活层,丢弃概率为0.5
dropout_layer = nn.Dropout(p=0.5)
# 创建一个随机输入张量
input_tensor = torch.randn(3, 5)
# 将输入张量传递给随机失活层进行随机丢弃
output = dropout_layer(input_tensor)
print(output)
1.2.3 动手实践
#搭建神经网络
class Net(nn.Module):
def __init__(self):
super(Net,self).__init__()
self.conv1 = nn.Conv2d(1,6,5)
self.conv2 = nn.Conv2d(6,16,5)
self.fc1 = nn.Linear(16*8*8,120)
self.fc2 = nn.Linear(120,84)
def forward(self,x):
input_size=x.size(0)
x=self.conv1(x)
#print(x.size())
x=F.relu(x)
x=F.max_pool2d(x,2)
x=self.conv2(x)
#print(x.size())
x=F.relu(x)
x=x.view(input_size,-1)
x=self.fc1(x)
#print(x.size())
x=F.relu(x)
x=self.fc2(x)
return F.log_softmax(x,dim=1)
1.3训练迭代
使用优化器进行模型训练时,可以根据需要选择不同的优化器算法和设置不同的参数。
-
创建优化器对象:
optimizer = torch.optim.Optimizer(model.parameters(), lr=learning_rate)这里的
model.parameters()是指模型的可学习参数,lr是学习率(learning rate)。除了学习率,还可以设置其他参数,如权重衰减(weight decay)、动量(momentum)等。
import torch
import torch.nn as nn
import torch.optim as optim
# 创建模型实例(这里是你创建的模型)
model = YourModel()
# 定义损失函数
criterion = nn.CrossEntropyLoss()
# 定义优化器
optimizer = optim.SGD(model.parameters(), lr=0.01, weight_decay=0.001, momentum=0.9)
# 在每个训练迭代中进行以下步骤:
for inputs, labels in dataloader:
# 清零梯度
optimizer.zero_grad()
# 前向传播
outputs = model(inputs)
# 计算损失
loss = criterion(outputs, labels)
# 反向传播
loss.backward()
# 更新参数
optimizer.step()
1.4模型评估
model.eval() 是一个模型方法,用于将模型设置为评估模式。在评估模式下,模型会禁用一些特定的操作,如 Dropout 层和批归一化层的随机性,以确保输出的一致性和可重复性。
更详细的用法如下:
-
设置模型为评估模式:
model.eval()这将把模型设置为评估模式,禁用一些随机性操作。
-
在评估模式下进行推断或评估:
with torch.no_grad(): # 进行推断或评估操作 output = model(input_tensor)
下面是一个更详细的示例代码片段,展示了 model.eval() 的用法:
import torch
import torch.nn as nn
model.eval()
correct=0
with torch.no_grad():
for data,target in dataloader:
output = model(data)
pred = output.argmax(dim=1,keepdim=True)
correct+=pred.eq(target.view_as(pred)).sum().item()
return correct/len(dataloader.dataset)
在上述示例中,首先创建了模型实例,然后使用 model.eval() 将模型设置为评估模式。接下来,加载了预训练模型参数,并在评估模式下进行推断或评估操作。使用 torch.no_grad() 上下文管理器来禁用梯度计算,以提高推断或评估的效率。
请注意,model.eval() 方法只是将模型设置为评估模式,并不会自动执行推断或评估操作。你需要根据具体的需求编写相应的代码来进行推断或评估。
1.5 保存模型
保存模型是在训练完成后将模型的参数保存到磁盘上,以便后续加载和使用。以下是保存模型的一般步骤:
-
定义模型:
model = YourModel() -
训练模型:
# 训练过程... -
保存模型参数:
torch.save(model.state_dict(), 'model.pth')上述代码将模型的参数保存到名为
'model.pth'的文件中。model.state_dict()返回一个包含模型参数的字典,torch.save()函数将该字典保存到文件中。
完整的示例代码如下:
import torch
import torch.nn as nn
# 定义模型
model = YourModel()
# 训练模型
# ...
# 保存模型参数
torch.save(model.state_dict(), 'model.pth')
保存模型参数后,你可以使用 torch.load() 函数加载模型参数,并将其应用于新的模型实例中:
import torch
import torch.nn as nn
# 定义模型
model = YourModel()
# 加载模型参数
model.load_state_dict(torch.load('CNN.pth'))
通过加载模型参数,你可以恢复之前训练好的模型,并在后续的推断或评估中使用它。
2.在MNIST数据集实验
2.1 结果
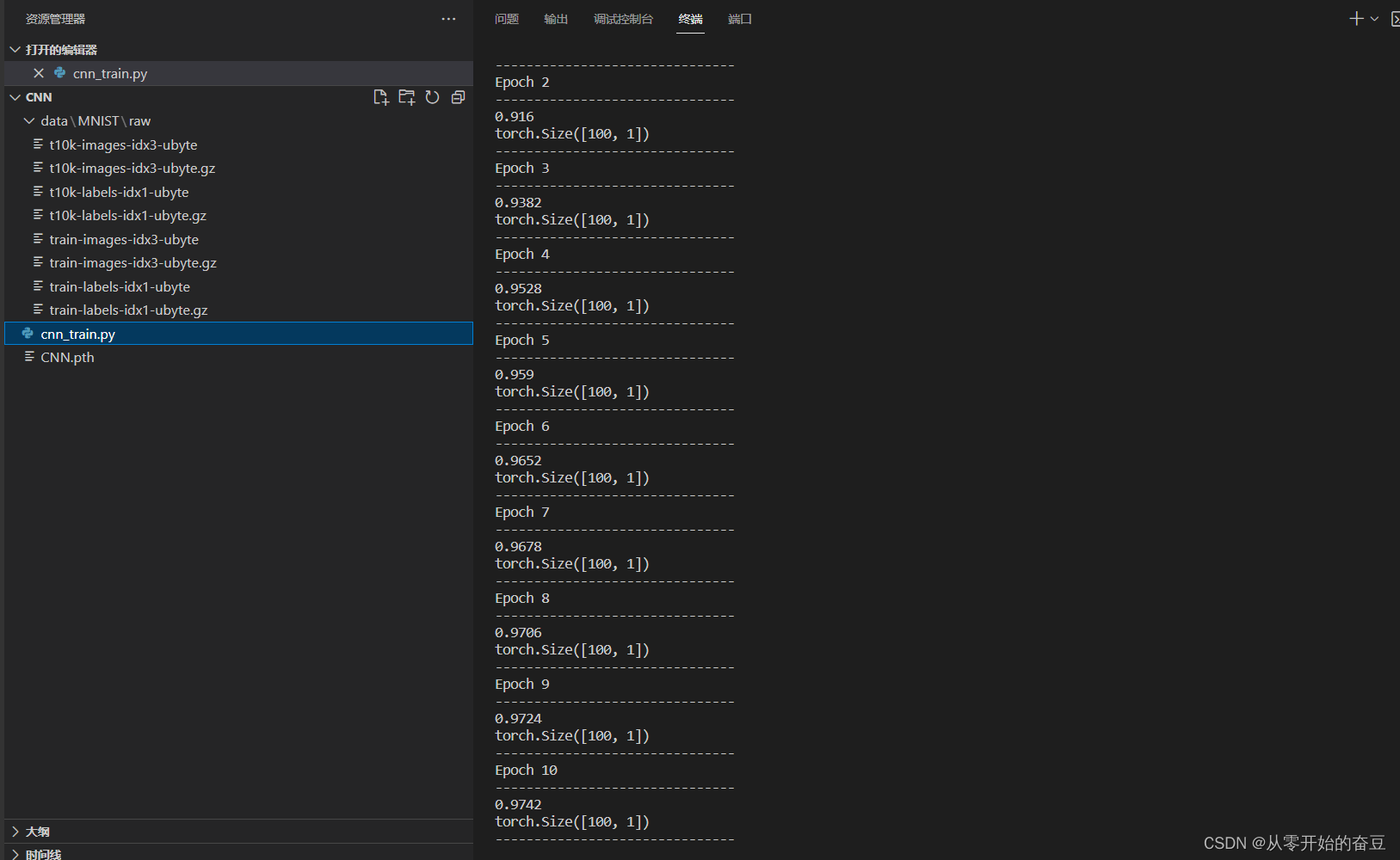
数据如图所示

训练得到,保存模型:
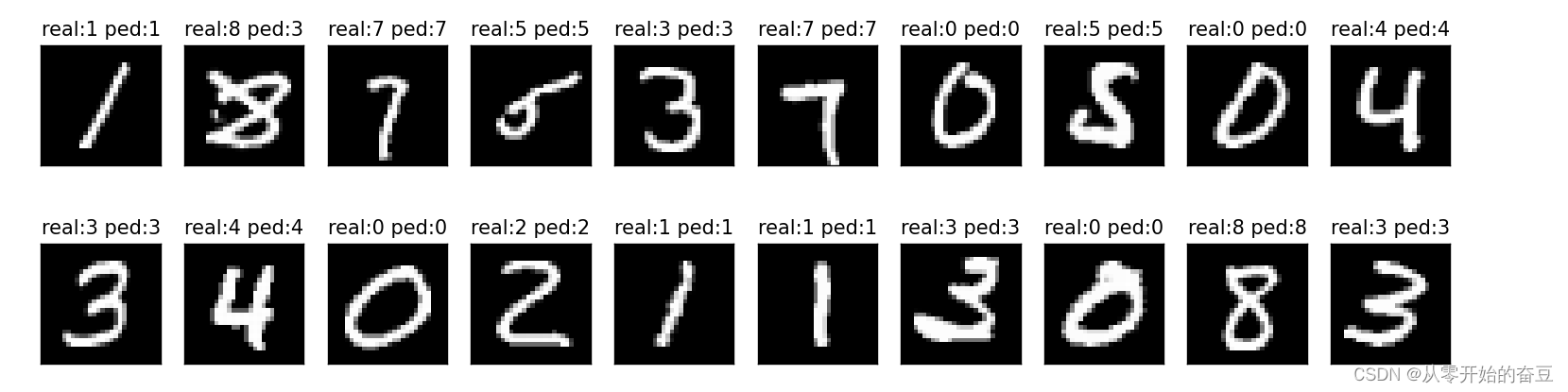
调用预测:

调用保存的模型:
2.2总代码
import torch
from torch.utils.data import Dataset, DataLoader
from torchvision import datasets
from torchvision.transforms import ToTensor
import matplotlib.pyplot as plt
import torchvision.transforms as transforms
import torchvision
import torch.nn.functional as F
from torch import nn, optim
import torch
from torch.utils.data import Dataset
import numpy as np
""" class MyDataset(Dataset):
def __init__(self, data):
self.data = data
def __len__(self):
return len(self.data)
def __getitem__(self, index):
x = self.data[index][0]
y = self.data[index][1]
return x, y
data = [(torch.randn(10), torch.randint(0, 2, (1,))) for _ in range(100)]
print(data)
dataset = MyDataset(data)
print(dataset)
dataloader = torch.utils.data.DataLoader(dataset, batch_size=10, shuffle=True)"""
device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")
print(device)
# 指定数据集的根目录
root = './data'
# 定义数据预处理
transform = transforms.Compose([
transforms.ToTensor(),
transforms.Normalize((0.5,), (0.5,))
])
# 加载MNIST数据集
mnist_dataset = torchvision.datasets.MNIST(
root=root,
train=True,
transform=transform,
download=True
)
print(len(mnist_dataset))
#划分数据集
train_dataset, val_dataset = torch.utils.data.random_split(mnist_dataset, [55000, 5000])
# 创建数据加载器
mnist_train_dataloader = DataLoader(
dataset=train_dataset,
batch_size=100,
shuffle=False,
)
mnist_val_dataloader = DataLoader(
dataset=val_dataset,
batch_size=100,
shuffle=False,
)
#搭建神经网络
class Net(nn.Module):
def __init__(self):
super(Net,self).__init__()
self.conv1 = nn.Conv2d(1,6,5)
self.conv2 = nn.Conv2d(6,16,5)
self.fc1 = nn.Linear(16*8*8,120)
self.fc2 = nn.Linear(120,84)
def forward(self,x):
input_size=x.size(0)
x=self.conv1(x)
#print(x.size())
x=F.relu(x)
x=F.max_pool2d(x,2)
x=self.conv2(x)
#print(x.size())
x=F.relu(x)
x=x.view(input_size,-1)
x=self.fc1(x)
#print(x.size())
x=F.relu(x)
x=self.fc2(x)
return F.log_softmax(x,dim=1)
#训练
def train(epoch_idx,model,dataloader,optimizer):
model.train()
for batch_idx, (data,target) in enumerate(dataloader):
optimizer.zero_grad()
output = model(data)
loss = F.nll_loss(output,target)
loss.backward()
optimizer.step()
#预测结果
def test(model,dataloader):
model.eval()
correct=0
with torch.no_grad():
for data,target in dataloader:
output = model(data)
pred = output.argmax(dim=1,keepdim=True)
correct+=pred.eq(target.view_as(pred)).sum().item()
return correct/len(dataloader.dataset),pred
network = Net().to(device)
""" n_epochs = 10
learning_rate=0.01
optimizer = optim.SGD(network.parameters(), lr=learning_rate)
for i in range(1,n_epochs+1):
print(f"Epoch {i}n-------------------------------")
train(epoch_idx = i, model = network,dataloader = mnist_train_dataloader, optimizer = optimizer)
accuray,result=test(model = network,dataloader = mnist_val_dataloader)
print(accuray)
print(result.shape)
print("-------------------------------")
torch.save(network.state_dict(), 'CNN.pth') """
network.load_state_dict(torch.load('CNN.pth'))
accuray,result=test(model = network,dataloader = mnist_val_dataloader)
data_loader_iter = iter(mnist_val_dataloader)
while True:
try:
item = next(data_loader_iter)
# 对 item 进行处理
image, label = item
except StopIteration:
break
images=image.numpy()
labels=label.numpy()
fig = plt.figure(figsize=(25,4))
for idx in np.arange(20):
ax = fig.add_subplot(2,10, idx+1, xticks=[], yticks=[])
ax.imshow(images[idx][0], cmap='gray')
ax.set_title('real:'+str(labels[idx].item())+'ped:'+str(result[idx].item()))
plt.show()
原文地址:https://blog.csdn.net/m0_68926749/article/details/134723247
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。
如若转载,请注明出处:http://www.7code.cn/show_18563.html
如若内容造成侵权/违法违规/事实不符,请联系代码007邮箱:suwngjj01@126.com进行投诉反馈,一经查实,立即删除!