本文介绍: HWP 功能仅针对高度结构化道路设计,限制使用环境为严格限制出入、有明确的隔离设置区分对向交通、无立体或水平交叉路口、无交通灯等设施的高速公路或城市快速路(不包含出、入匝道功能);HWP 功能能够识别可以依法取得牌照,合法上高速公路行驶的普通乘用车、商用车等车辆目标;对于其他类型的障碍物,HWP 功能会尽可能的按照安全性策略进行规避并发出警报,但受限于车载感知能力,对于无法识别(路面坑洼等)、近距离识别(石块、临时施工等)或突发情况(山区落石等),HWP 功能仍存在无响应或响应不及时的风险。
目 录
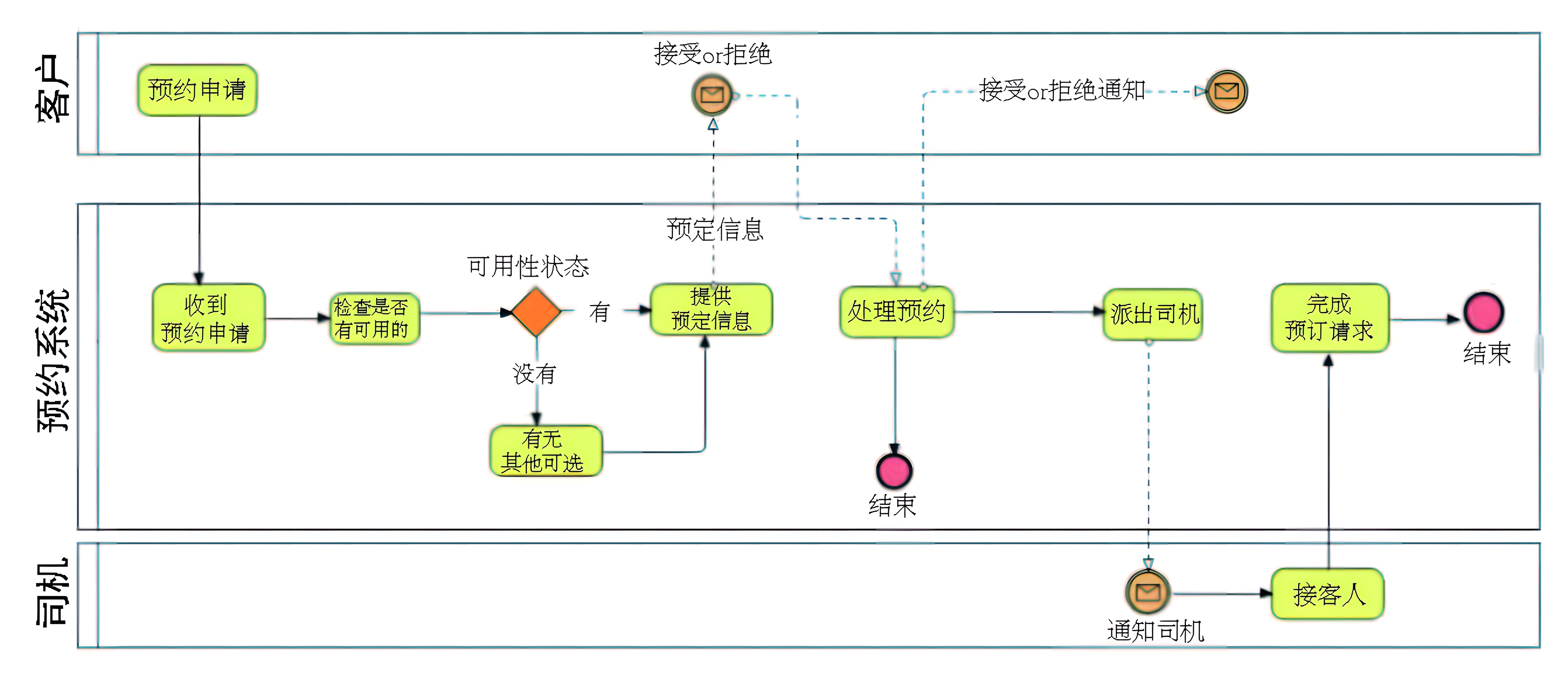
高速公路代驾(Highway Pilot, HWP)功能可以根据车辆行驶方向的交通情况,在纵向上自动控制车辆加速与减速,在横向上自动将车辆保持在其行驶路径上。在 HWP 功能正常作用且并未发出接管报警时,驾驶员无需介入车辆控制, 只要保持适度的注意力在行车环境的监控上即可。当 HWP 功能判断道路环境或自车状态超出系统能力时发出接管报警,此时需要驾驶员即刻进行监测并接管控制。若系统发出报警,但驾驶员长时间未介入检测或控制,HWP 功能将会控制车辆逐渐停止在其行驶车道中。
声明:本站所有文章,如无特殊说明或标注,均为本站原创发布。任何个人或组织,在未征得本站同意时,禁止复制、盗用、采集、发布本站内容到任何网站、书籍等各类媒体平台。如若本站内容侵犯了原著者的合法权益,可联系我们进行处理。