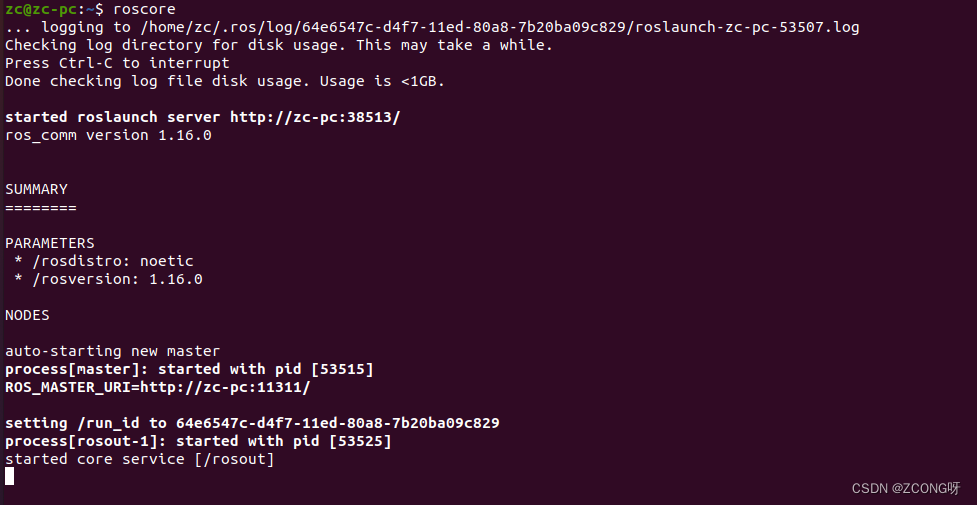
当前位置: 首页互联网正文 本文介绍: 新系统安装ROS 1.添加安装ROS的软件源 sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list' 2.添加密钥 sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654 3.更新软件源,更新前面添加的ROS软件源,否则会找不到安装包(E: 无法定位软件包 ros–noetic–desktop–full),更新软件源即可 sudo apt update 4.安装ROS(根据Ubuntu的不同版本选择不同版本的ROS,20.04对应的是noetic版本) sudo apt install ros-noetic-desktop-full 5.初始化rosdep(方法三直接无敌解决问题) sudo rosdep init 运行: rosdep update 方法一:直接运行 运气好的网络多运行几次就可以成功,但大多数是很难成功的,或者可以通过魔法进行更新,概率比正常会大很多,成功之后如下所示: 方法二: 如果尝试多次不能成功可以通过将文件下载至本地,对本地文件进行链接 git clone https://github.com/ros/rosdistro.git 通过命令拉取迟迟没有反应,可以直接访问上面的github连接直接下载到本地,放在home目录下,将文件名重命名为 rosdistro,根据以下步骤分别替换五个文件中的内容 注意:此方法中的所有yourname都需要改为自己电脑的用户名 第一个文件: cd /home/yourname/rosdistro/rosdep/sources.list.d/ sudo gedit 20-default.list 全选将所有的内容替换为: # os-specific listings first yaml file:///home/yourname/rosdistro/rosdep/osx-homebrew.yaml osx # generic yaml file:///home/yourname/rosdistro/rosdep/base.yaml yaml file:///home/yourname/rosdistro/rosdep/python.yaml yaml file:///home/yourname/rosdistro/rosdep/ruby.yaml gbpdistro file:///home/yourname/rosdistro/releases/fuerte.yaml fuerte # newer distributions (Groovy, Hydro, ...) must not be listed anymore, they are being fetched from the rosdistro index.yaml instead 第二个文件:(注:20.04的python版本为python3,低版本的python版本为python2.7,进行相应的更改即可) cd /usr/lib/python3/dist-packages/rosdep2/ sudo gedit gbpdistro_support.py 替换为: FUERTE_GBPDISTRO_URL = 'file:///home/yourname/rosdistro/' 'releases/fuerte.yaml' 第三个文件: cd /usr/lib/python3/dist-packages/rosdep2/ sudo gedit rep3.py 替换为: REP3_TARGETS_URL = 'file:///home/yourname/rosdistro/releases/targets.yaml' 第四个文件: cd /usr/lib/python3/dist-packages/rosdistro/ sudo gedit __init__.py 替换为 : DEFAULT_INDEX_URL = 'file:///home/yourname/rosdistro/index-v4.yaml' 第五个文件: cd /etc/ros/rosdep/sources.list.d sudo gedit 20-default.list 替换为: #os-specific listings first yaml file:///home/yourname/rosdistro/rosdep/osx-homebrew.yaml osx #generic yaml file:///home/yourname/rosdistro/rosdep/base.yaml yaml file:///home/yourname/rosdistro/rosdep/python.yaml yaml file:///home/yourname/rosdistro/rosdep/ruby.yaml gbpdistro file:///home/yourname/rosdistro/releases/fuerte.yaml fuerte #newer distributions (Groovy, Hydro, ...) must not be listed anymore, they are being fetched from the rosdistro index.yaml instead 打开新终端运行: rosdep update 成功解决!!! 方法三:这部分完全参考这篇文章,超级好用,简单高效:https://zhuanlan.zhihu.com/p/398754989 rosdepc的安装及使用: 安装 sudo pip install rosdepc 如果显示没有pip可以试试pip3。 sudo pip3 install rosdepc 如果pip3还没有 sudo apt-get install python3-pip sudo pip install rosdepc 使用 sudo rosdepc init rosdepc update 6.设置环境变量 echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc source ~/.bashrc 7.安装rosinstall sudo apt install python3-rosinstall python3-rosinstall-generator python3-wstool 8.测试roscore roscore 成功运行 !!!!!!!!!!!!!!!!! 原文地址:https://blog.csdn.net/abc20150125/article/details/129996764 本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若转载,请注明出处:http://www.7code.cn/show_18867.html 如若内容造成侵权/违法违规/事实不符,请联系代码007邮箱:suwngjj01@126.com进行投诉反馈,一经查实,立即删除! 主题授权提示:请在后台主题设置-主题授权-激活主题的正版授权,授权购买:RiTheme官网显示所有内容声明:本站所有文章,如无特殊说明或标注,均为本站原创发布。任何个人或组织,在未征得本站同意时,禁止复制、盗用、采集、发布本站内容到任何网站、书籍等各类媒体平台。如若本站内容侵犯了原著者的合法权益,可联系我们进行处理。rossudo添加 代码007普通 打赏 收藏 海报 链接