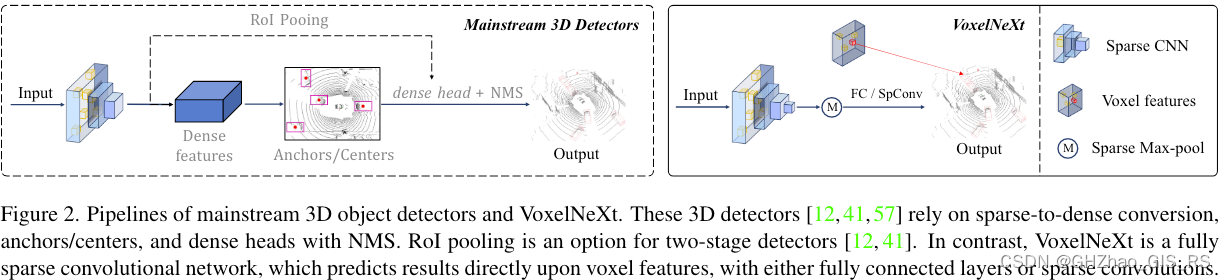
通用检测器 vs VoxelNext
一、3D稀疏卷积模块
1.1、额外的两次下采样
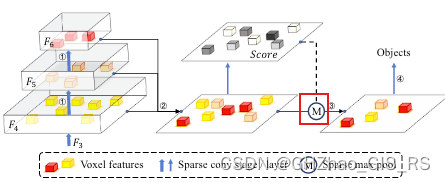
使用通用的3D sparse conv,包含4个stage,每个stage穿插常规稀疏卷积和子流形稀疏卷积,得到的特征分别为F1、F2、F3、F4。
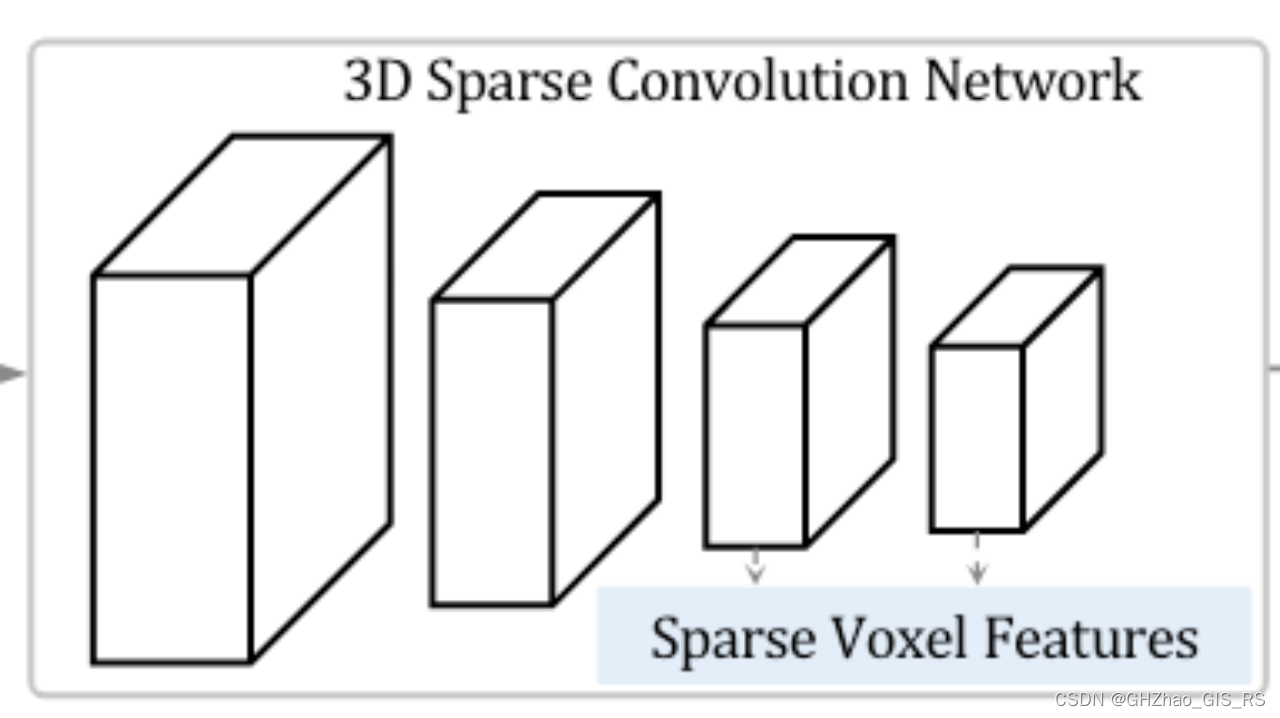
VoxelNext的backbone在原有的基础上再增加两次下采样,分别得到F5,F6,目的是增大感受野
消融实验结果

从实验结果来看,直接使用原始的4stage结构接检测头后精度下降8.9,多加两次下采样后精度提升9.5。且从可视化效果来看额外的下采样使感受野确实增大了。

代码

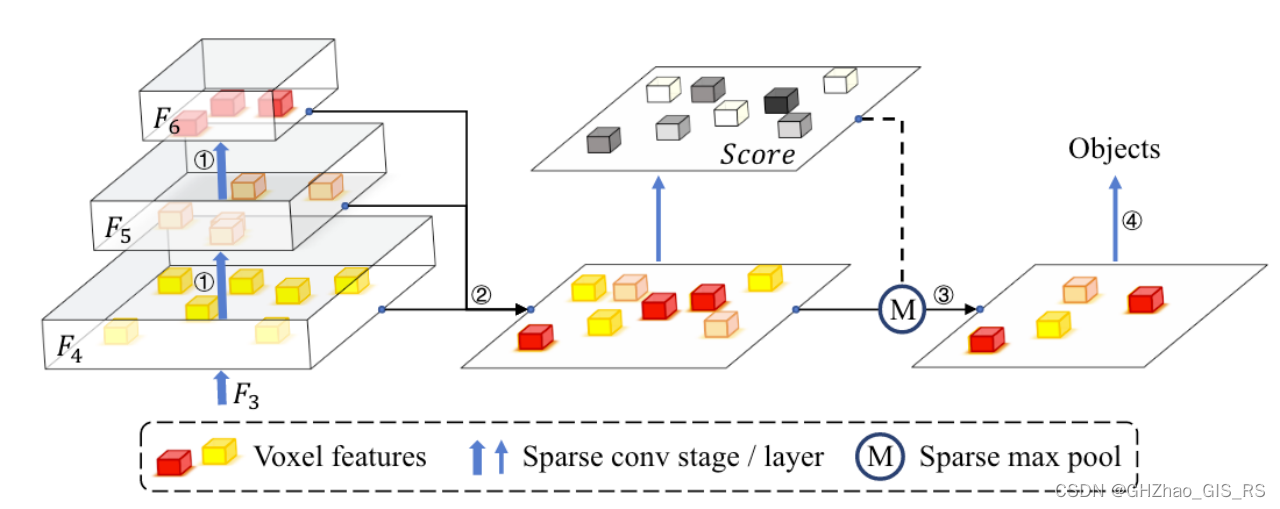
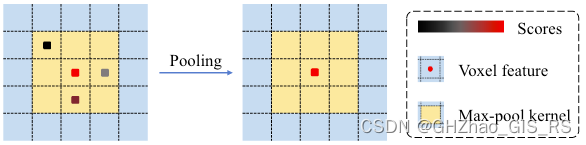
1.2、稀疏体素删减
在backbone的第2个stage开头会有一个下采样,Voxelnext在下采样的时候计算体素的重要性,根据比例删掉不重要的体素。

重要性判断公式:直接计算体素所有通道特征的均值,然后经过一个sigmoid,输出的sorce作为重要程度。

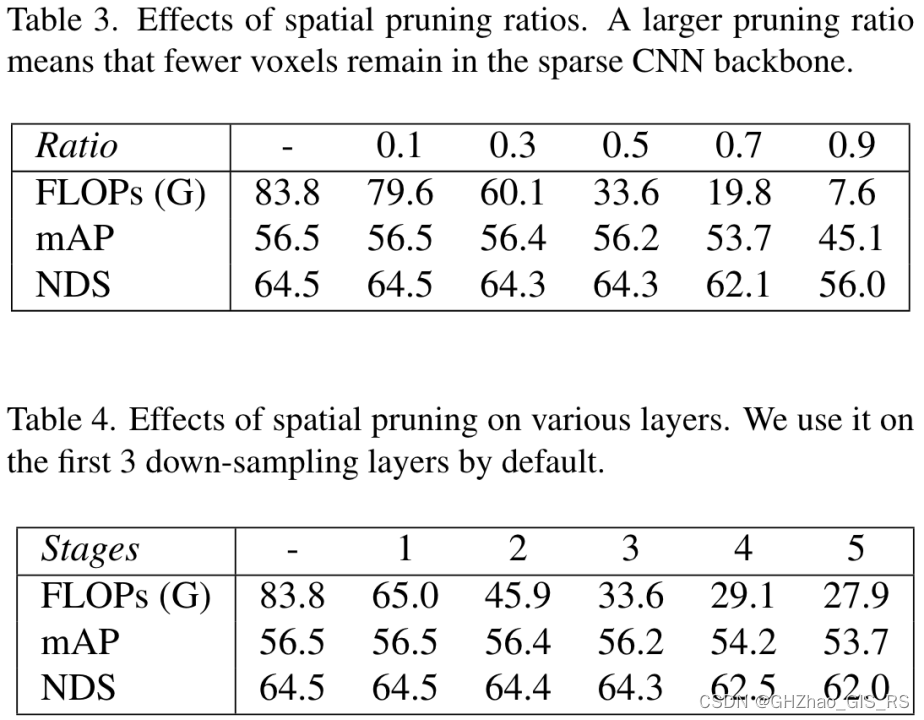
消融实验:
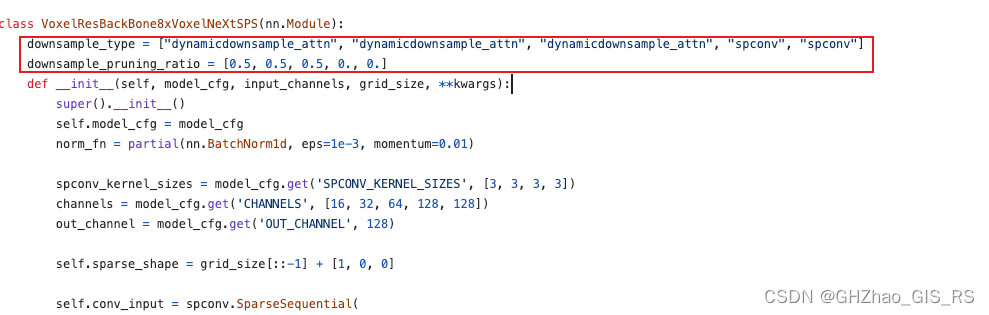
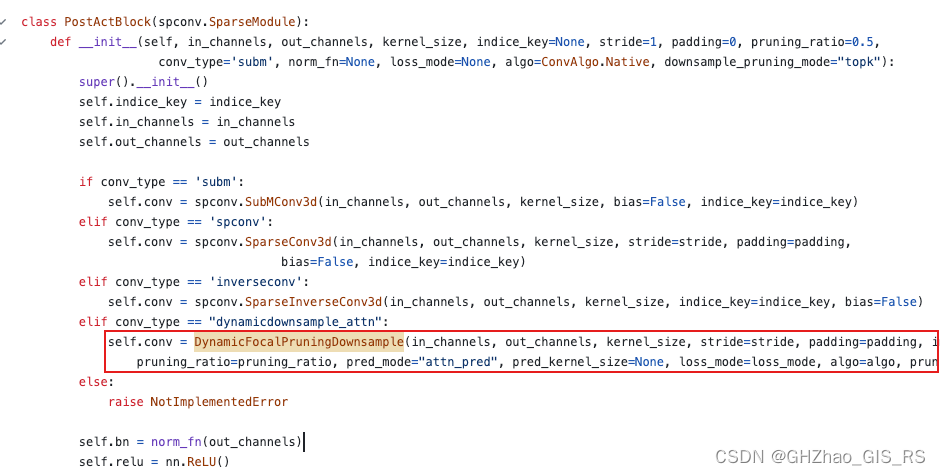
代码
二、稀疏体素高度压缩

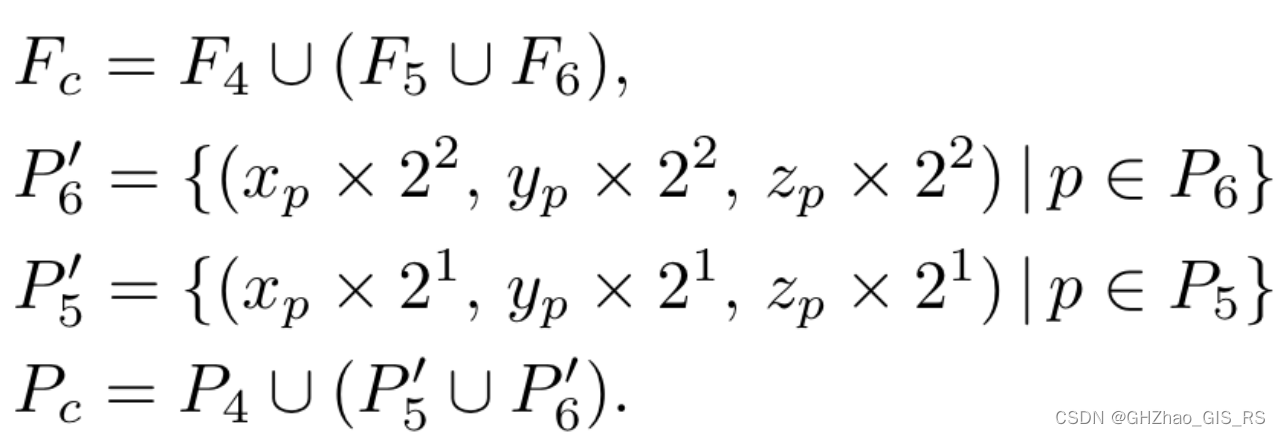
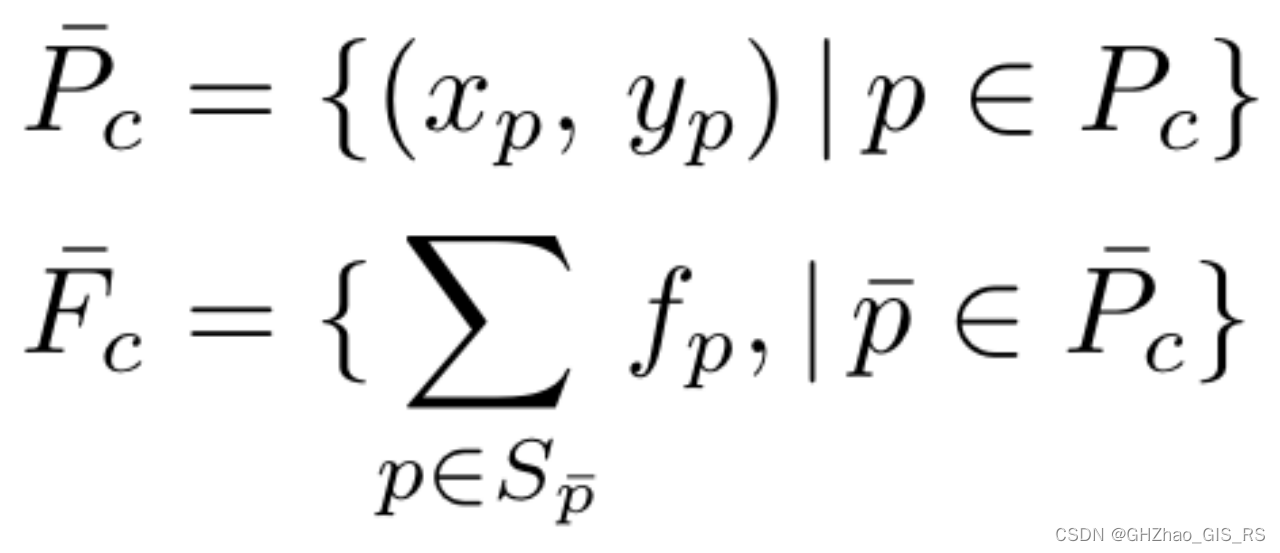
代码

三、稀疏预测head


声明:本站所有文章,如无特殊说明或标注,均为本站原创发布。任何个人或组织,在未征得本站同意时,禁止复制、盗用、采集、发布本站内容到任何网站、书籍等各类媒体平台。如若本站内容侵犯了原著者的合法权益,可联系我们进行处理。