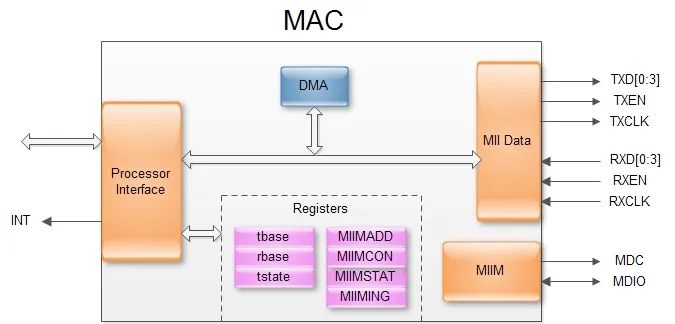
本文介绍: 从硬件的角度看,以太网接口电路主要由MAC(Media Access Control)控制器和物理层接口PHY(Physical Layer,PHY)两大部分构成。如下图所示:DMA控制器通常属于CPU的一部分,用虚线放在这里是为了表示DMA控制器可能会参与到网口数据传输中。但是,在实际的设计中,以上三部分并不一定独立分开的。由于,PHY整合了大量模拟硬件,而MAC是典型的全数字器件。考虑到芯片面积及模拟/数字混合架构的原因,通常,将MAC集成进微控制器而将PHY留在片外。
本文主要介绍以太网的 MAC 和 PHY,以及之间的 MII(Media Independent Interface ,媒体独立接口)和 MII 的各种衍生版本——GMII、SGMII、RMII、RGMII等。
简介
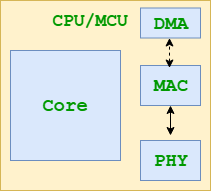
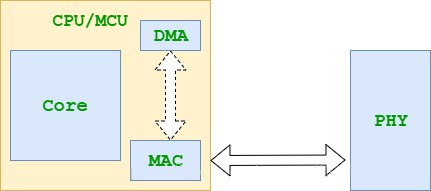
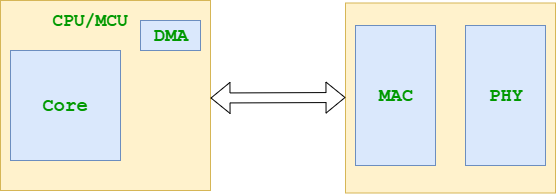
从硬件的角度看,以太网接口电路主要由MAC(Media Access Control)控制器和物理层接口PHY(Physical Layer,PHY)两大部分构成。如下图所示:
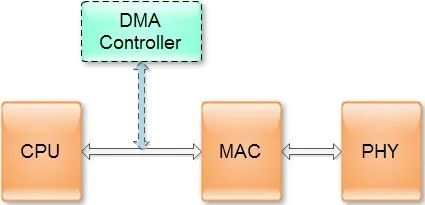
DMA控制器通常属于CPU的一部分,用虚线放在这里是为了表示DMA控制器可能会参与到网口数据传输中。但是,在实际的设计中,以上三部分并不一定独立分开的。由于,PHY整合了大量模拟硬件,而MAC是典型的全数字器件。
考虑到芯片面积及模拟/数字混合架构的原因,通常,将MAC集成进微控制器而将PHY留在片外。更灵活、密度更高的芯片技术已经可以实现MAC和PHY的单芯片整合。

什么是MAC
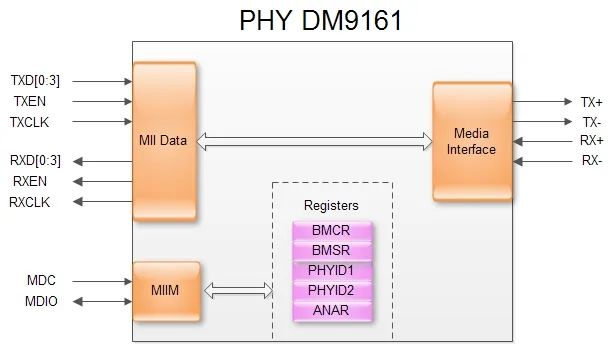
什么是PHY
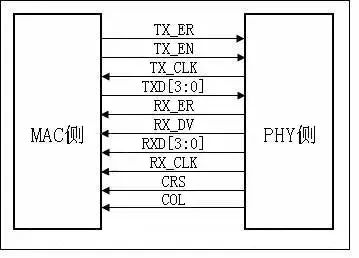
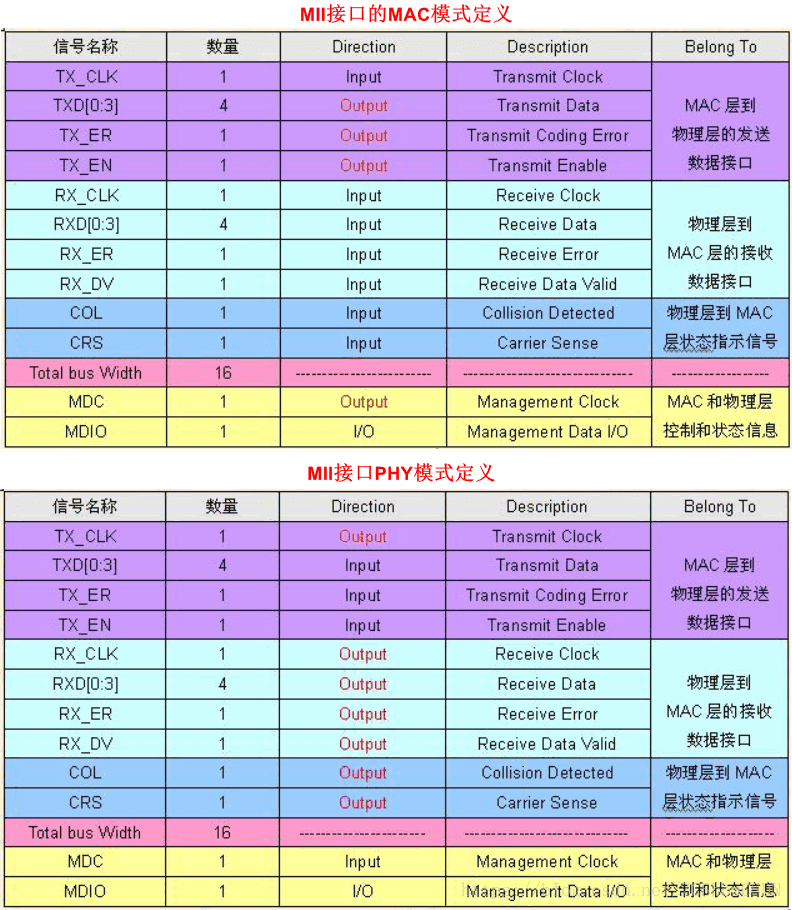
什么是MII
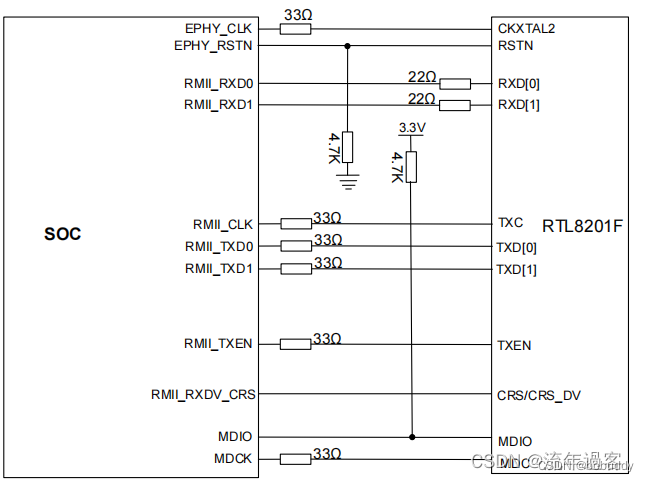
什么是RMII(Reduced Media Independant Interface)
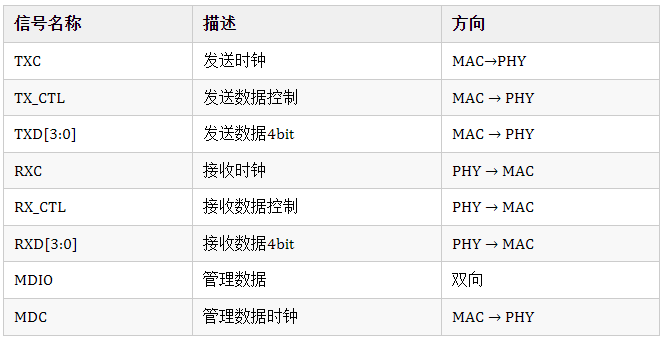
什么是GMII(Gigabit Media Independant Interface)

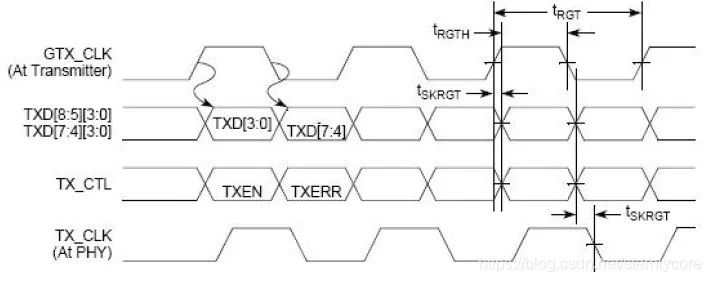
什么是RGMII
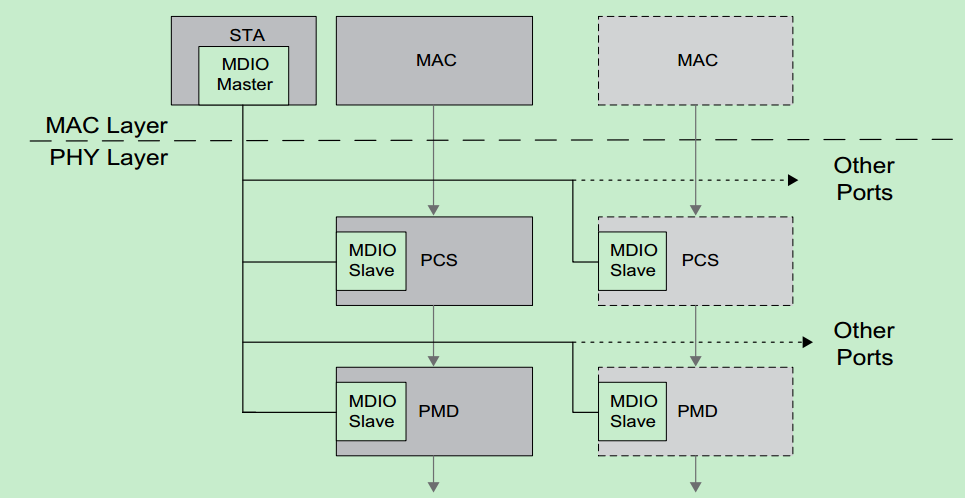
什么是SMI
QA
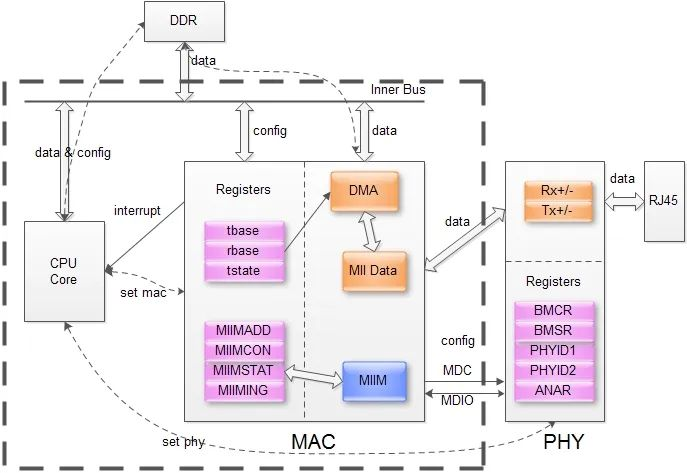
网卡的MAC和PHY间的关系?
PHY和MAC之间如何进行沟通
声明:本站所有文章,如无特殊说明或标注,均为本站原创发布。任何个人或组织,在未征得本站同意时,禁止复制、盗用、采集、发布本站内容到任何网站、书籍等各类媒体平台。如若本站内容侵犯了原著者的合法权益,可联系我们进行处理。