本文介绍: 综上所述,图像去噪是图像处理领域中的重要任务,其目的是消除或减弱图像中的噪音,以使图像更清晰、更易分析。不同的去噪算法适用于不同类型和强度的噪音,因此在实际应用中需要根据具体情况选择合适的方法。同时,对于特定的图像处理任务,也可能需要结合多种去噪技术以获得最佳效果。在实践中,通过理解各种去噪算法的原理和特性,可以更好地应用它们来解决实际问题,从而提升图像处理的质量和效率。
前言
上篇文章:图像数据噪音种类以及Python生成对应噪音,汇总了常见的图片噪音以及噪音生成方法,主要用在数据增强上面,作为数据集填充的方式,可以避免模型过拟合。想要了解图像数据增强算法的可以去看本人所撰这篇文章:图像数据增强算法汇总(Python)。
本篇文章将介绍常用到的图像去噪滤波算法,采用实例代码和处理效果一并展现的方式进行介绍,能够更直观的看到每种算法的效果。本篇文章偏实战,所以不会涉及到过多每种算法的原理理论计算公式,以一篇文章快速了解并实现这些算法,以效率最高的方式熟练这些知识。
博主专注数据挖掘五年,参与过大大小小数十来次数学建模,理解各类模型原理以及每种模型的建模流程和各类题目分析方法。此专栏的目的就是为了让零基础快速使用各类数学模型、机器学习和深度学习以及代码,每一篇文章都包含实战项目以及可运行代码。博主紧跟各类数模比赛,每场数模竞赛博主都会将最新的思路和代码写进此专栏以及详细思路和完全代码。希望有需求的小伙伴不要错过笔者精心打造的专栏。
一、图像噪音来源
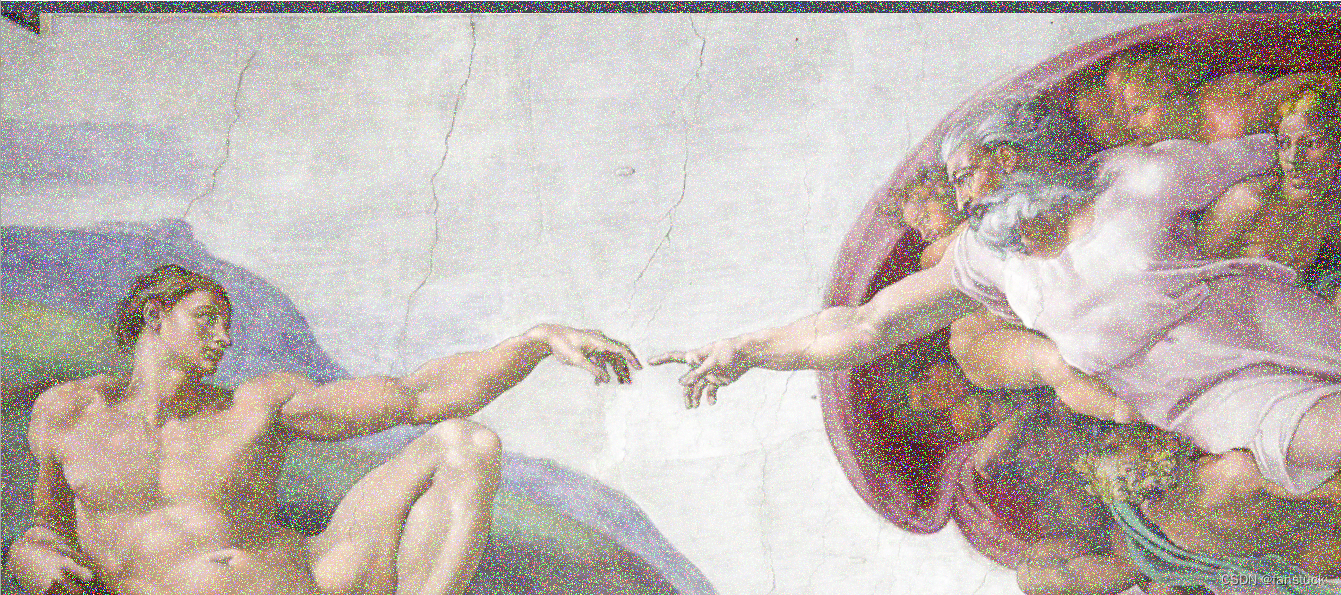
随着图像获取技术的不断发展,我们在实际应用中常常会面临到各种形式的图像噪声,这些噪声会影响到图像的质量和特征的清晰度。为了有效地提升图像的质量,图像处理领域涌现出了多种去噪方法,它们以不同的原理和技术手段来应对各种噪声情况。在接下来的介绍中,我们将详细探讨一些常用的图像去噪方法,包括均值滤波、中值滤波、高斯滤波等,以及它们的适用场景和特点。让我们一起深入了解如何有效地应对图像噪声,提升图像处理的准确度和质量。 图像噪音可以由多种因素引起:
二、图像去噪算法
1.均值滤波
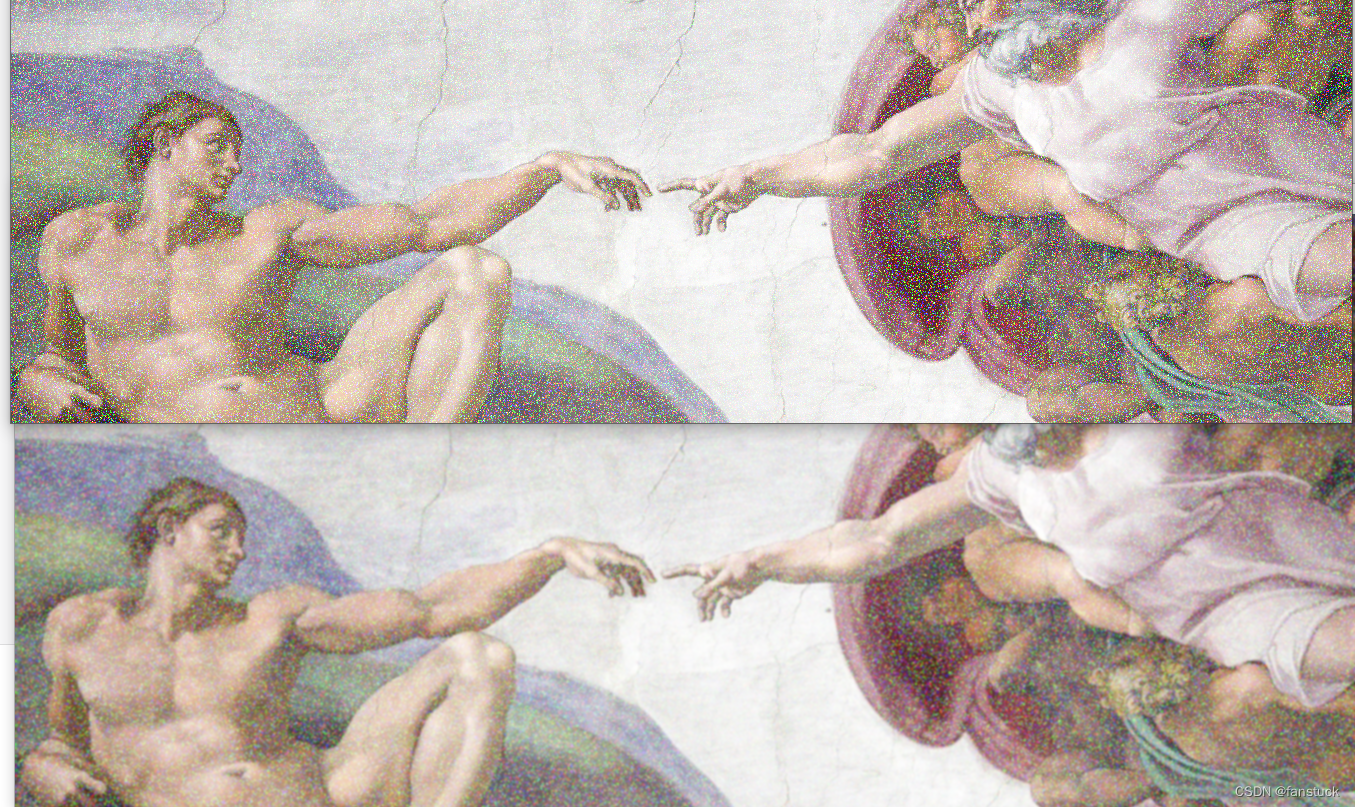
均值滤波是一种常用的图像处理技术,它的原理是将图像中每个像素的值替换为周围像素值的平均数。这样可以平滑图像,减少噪声的影响。具体的实现步骤如下:
1.应用均值滤波:
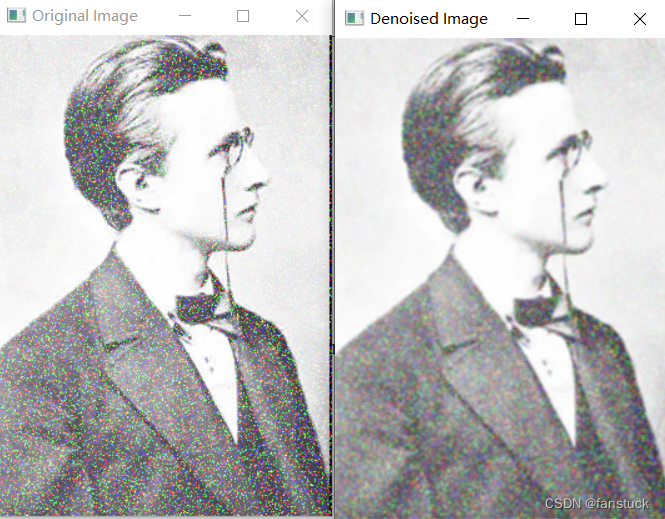
2.显示原始图片和去噪后的图片
2.中值滤波

3.高斯滤波

4.双边滤波


5.NL-Means(Non-Local Means)


总结
声明:本站所有文章,如无特殊说明或标注,均为本站原创发布。任何个人或组织,在未征得本站同意时,禁止复制、盗用、采集、发布本站内容到任何网站、书籍等各类媒体平台。如若本站内容侵犯了原著者的合法权益,可联系我们进行处理。