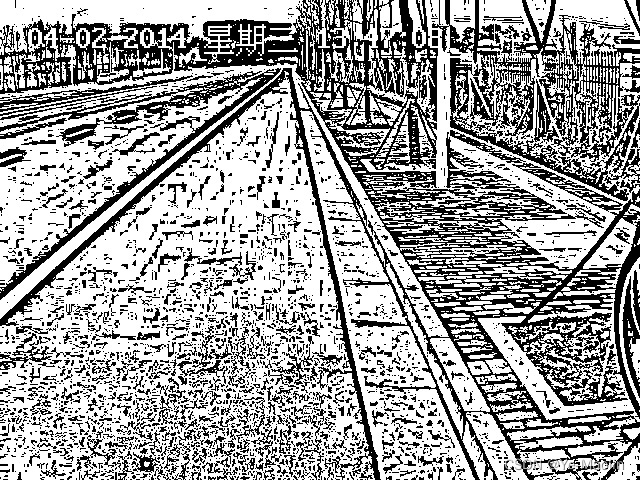
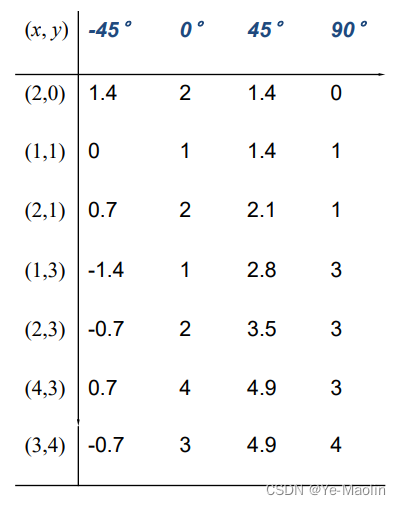
本文介绍: 本次我们采用标准Hough线变换来检测路沿,经过多次测试和调参,我们最后采用高斯模糊进行图像预处理,然后使用canny进行边缘提取,最后使用Hough线变换绘制直线。从视频中取出的每一帧是彩色图像,我们可以先将它变成灰度图像,即将图像中的每个像素的RGB值(红、绿、蓝)转换为一个单一的灰度值。但是canny检测出来的边缘中噪声比较多,我们再使用高斯滤波器模糊一下图像,在python中使用5×5的高斯滤波器模糊图像。最大次数3出现在(2,0°)和(3,90°),则对应的图像空间的线为x=2和y=3。

用python的OpenCV实现视频文件的处理,用videoCapture打开视频文件,读取每一帧进行处理,然后用videoWriter保存成视频。

























声明:本站所有文章,如无特殊说明或标注,均为本站原创发布。任何个人或组织,在未征得本站同意时,禁止复制、盗用、采集、发布本站内容到任何网站、书籍等各类媒体平台。如若本站内容侵犯了原著者的合法权益,可联系我们进行处理。