本文介绍: matlab标定:拍摄的多张图片中最终会计算出唯一的内参M,而外参每张图片都会对应有一个,由于我们的目的是为了测量目标点到相机位置的横纵向距离,所以可以将Zw值设置为0;在不考虑畸变的情况下,初次标定内参的五个参数,接着使用内参对畸变系数进行标定,重复循环计算直到收敛。(Pixel Coords):成像点在相机 sensor上像素的行数和列数,原点为图像左上角,不带有任何物理单位,或者说单位是pixel。:主光线与像平面相交的位置,这个交点取决于镜头的光轴,一般情况下图像中心不可能和主点严格对准。
1. 相机模型
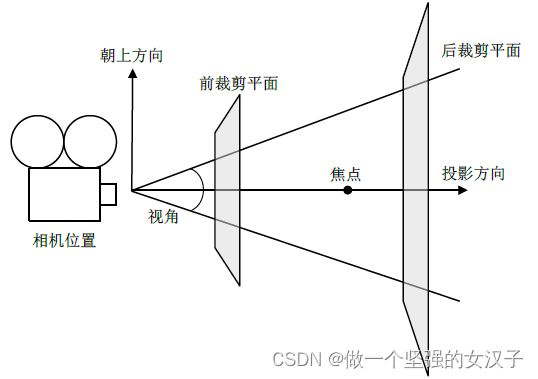
1.1 坐标系转换原理
世界坐标系(world Coords):点在真实世界中的位置,描述相机位置。
相机坐标系(Cameras Coords):以相机光学系统中心(镜头中心)为原点,建立相机坐标系。
图像物理坐标系(Film Coords):经过小孔成像后得到的二维坐标系,单位mm。
像素坐标系(Pixel Coords):成像点在相机 sensor上像素的行数和列数,原点为图像左上角,不带有任何物理单位,或者说单位是pixel。
主点:主光线与像平面相交的位置,这个交点取决于镜头的光轴,一般情况下图像中心不可能和主点严格对准。

其中从像素坐标系-相机坐标系的转换为:


1.2 镜头畸变
2. 相机标定


3. 距离测量
声明:本站所有文章,如无特殊说明或标注,均为本站原创发布。任何个人或组织,在未征得本站同意时,禁止复制、盗用、采集、发布本站内容到任何网站、书籍等各类媒体平台。如若本站内容侵犯了原著者的合法权益,可联系我们进行处理。