本文介绍: C2VIR-SLAM: Centralized Collaborative Visual-Inertial-Range Simultaneous Localization and Mapping
前言
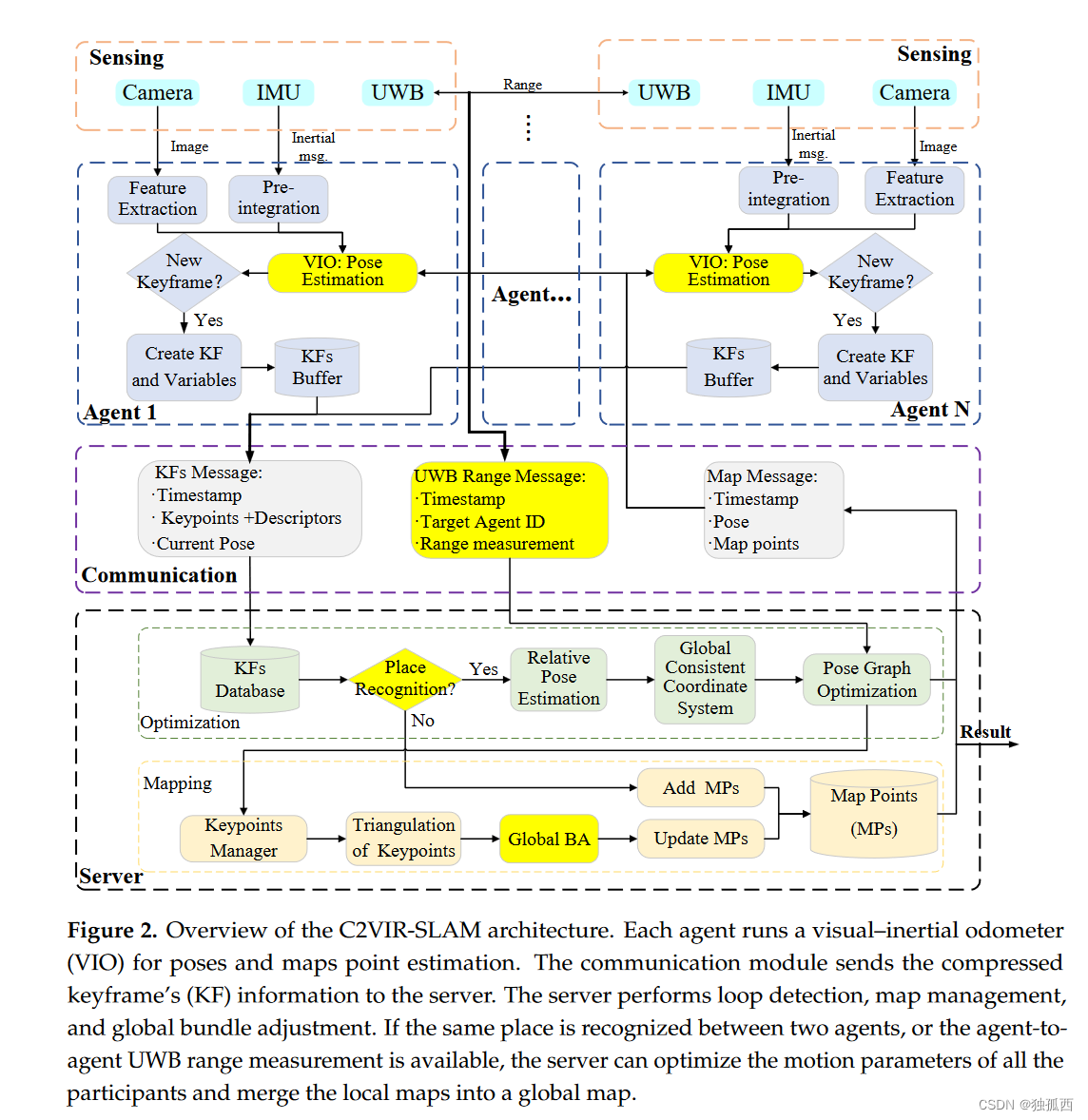
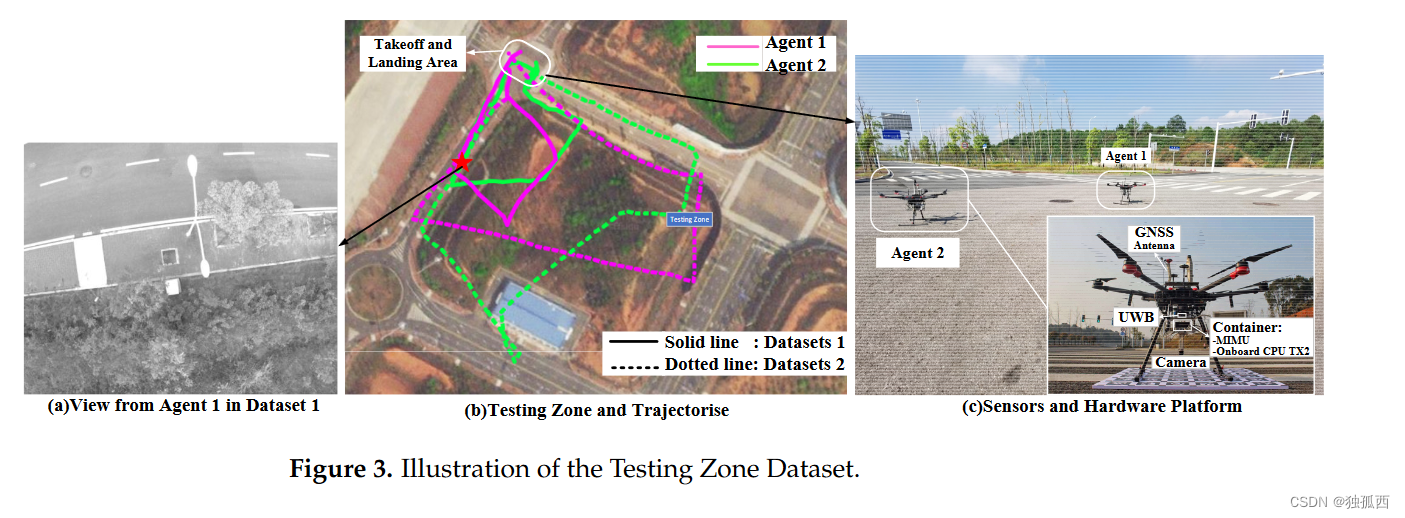
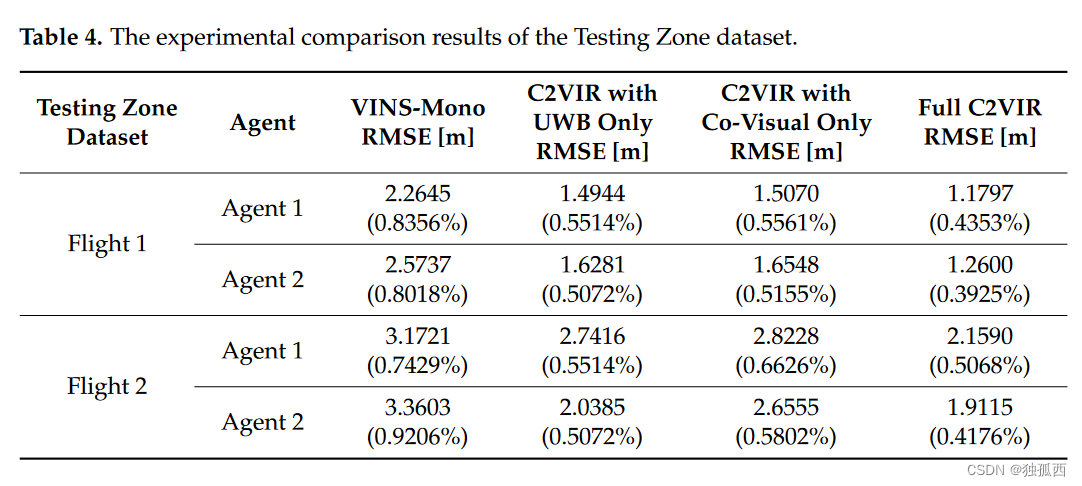
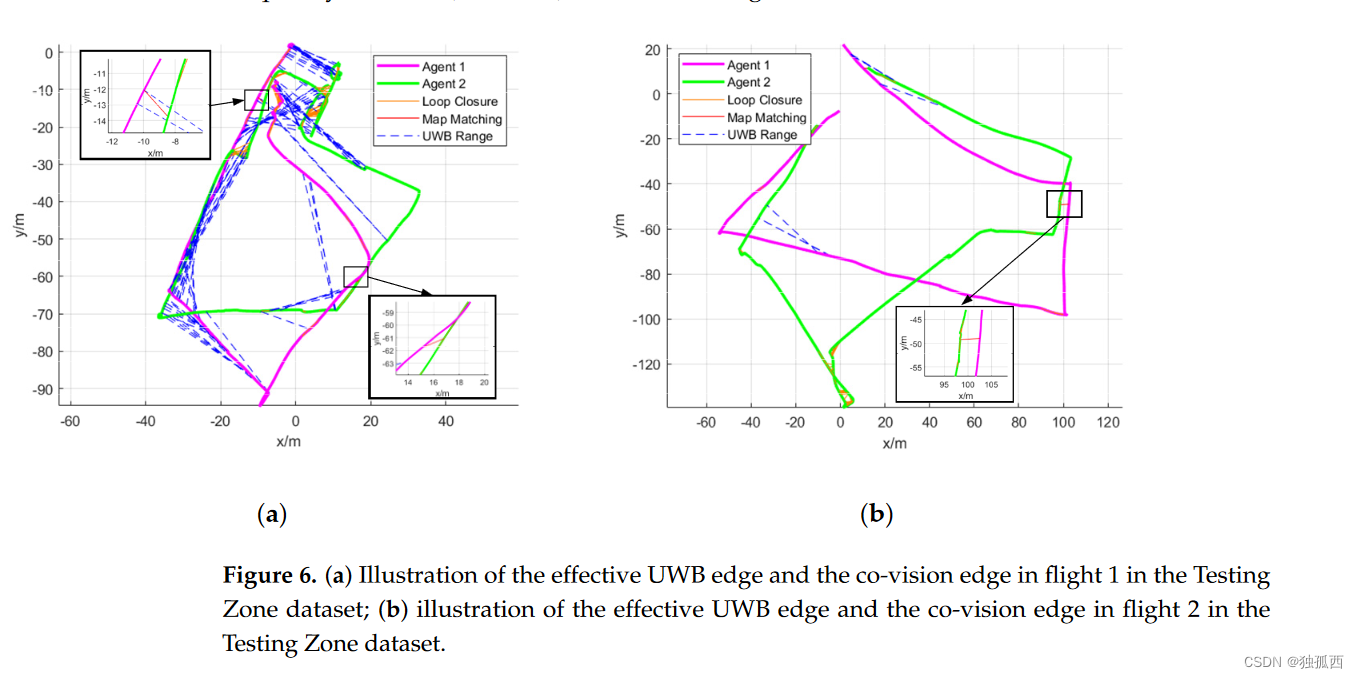
论文全程为C2VIR-SLAM: Centralized Collaborative Visual-Inertial-Range Simultaneous Localization and Mapping,是发表在MDPI drones(二区,IF=4.8)上的一篇论文。这篇文章使用单目相机、惯性测量单元( IMU )和UWB设备作为每个智能体上的机载传感器,以构建准确高效的集中式协同SLAM系统,并设计了一个全局优化算法,利用视觉位置技术检测到的跨智能体地图匹配信息,以及智能体到智能体的距离信息来优化所有参与者的运动参数,并将局部地图合并成一个全局地图。
一、问题背景
未知静态UWB锚点虽然去除了位置校准过程的要求,但仍然需要进行分布式处理;在大规模应用中,由于UWB设备的有效作用范围有限,也需要不同区域的锚点。UWB信号也会受到干扰。这些因素限制了UWB辅助协同SLAM系统的应用。
与基于UWB的系统相比,基于视觉的协同SLAM需要更少的基础设施建设,并且不受测距测量块的限制。然而,智能体之间需要有共同的视图区域并具有条件不变的位置识别能力才能进行协作,这限制了任务执行的效率。共享的视觉地图也给多智能体系统带来了巨大的通信负担。
虽然基于UWB和基于视觉的协同SLAM各有优劣,但研究者们已经提出了几种同时使用UWB和视觉来相互增强[ 4、5]的系统。然而,这些系统主要侧重于利用机载视觉系统来估计未标定的静态UWB锚点的运动和位置,严重依赖锚点进行协作。

二、主要假设
三、理论流程
1、单机器人视觉惯性里程计

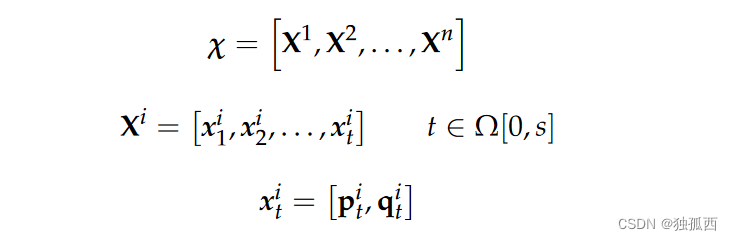
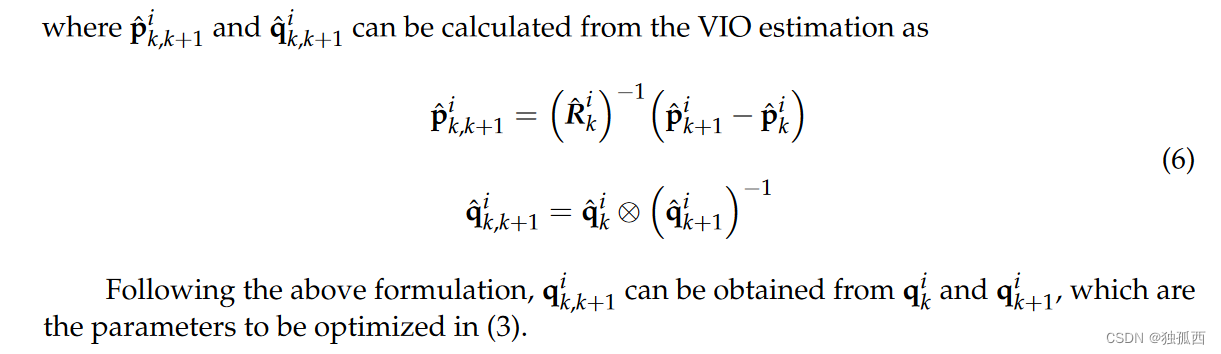
2、位姿图协同定位

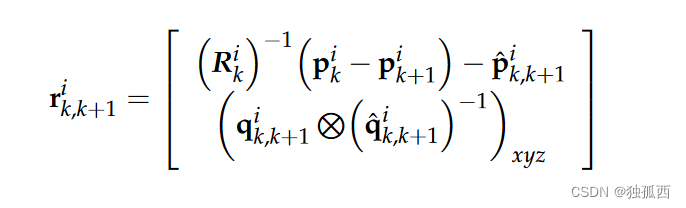
(1)来自里程计的序列约束
(2)视觉位置识别的地图匹配约束

(3)板载UWB的相对范围约束


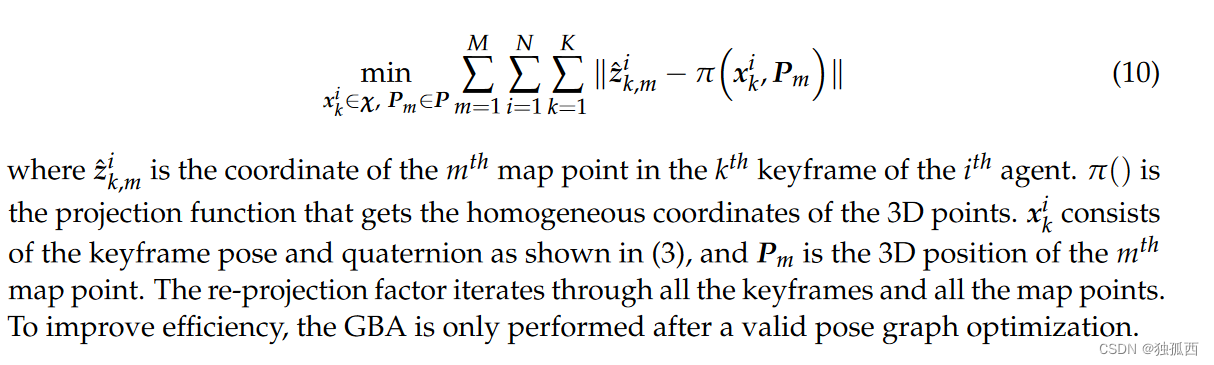
3、结合全局光束法平差的地图精化
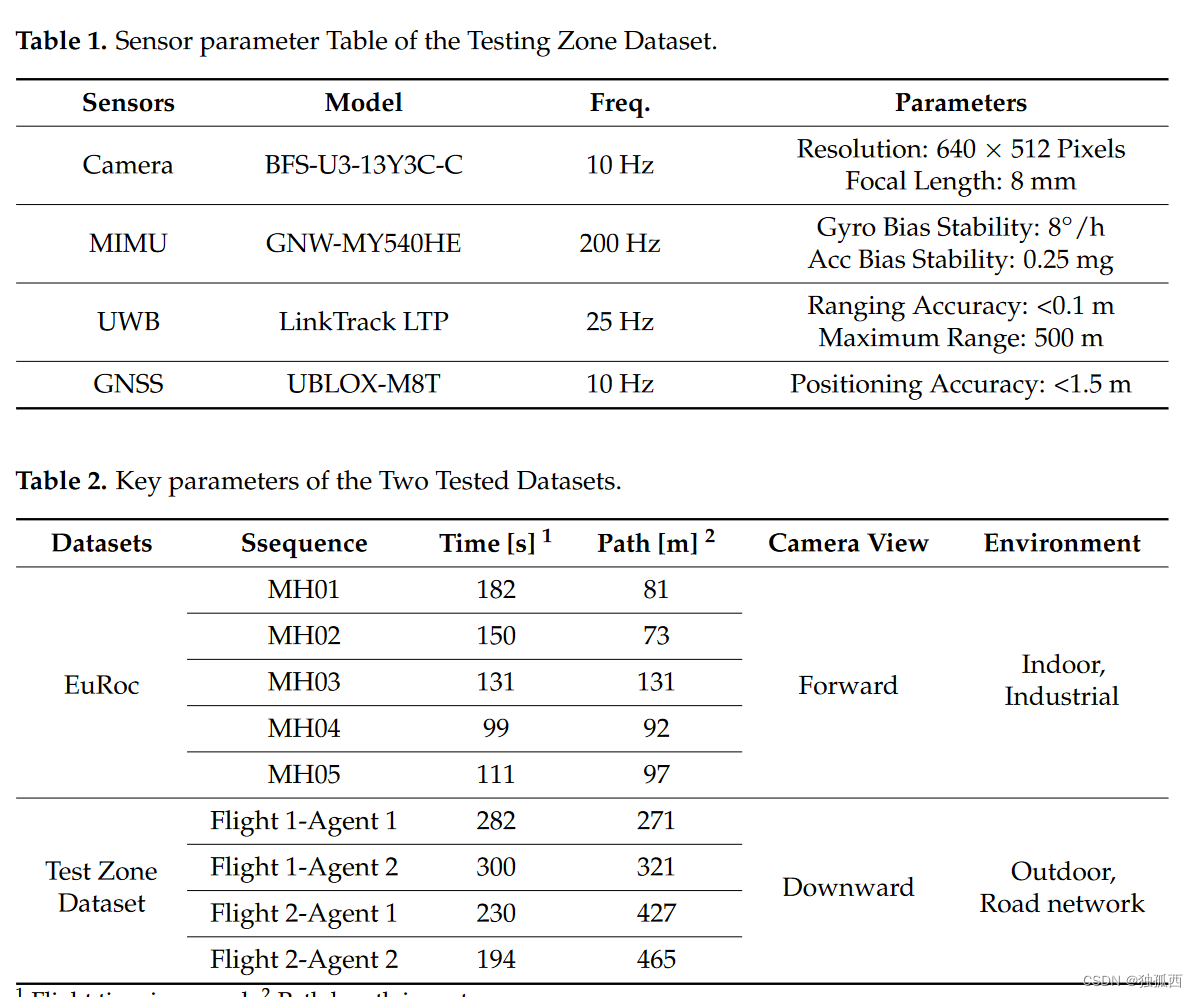
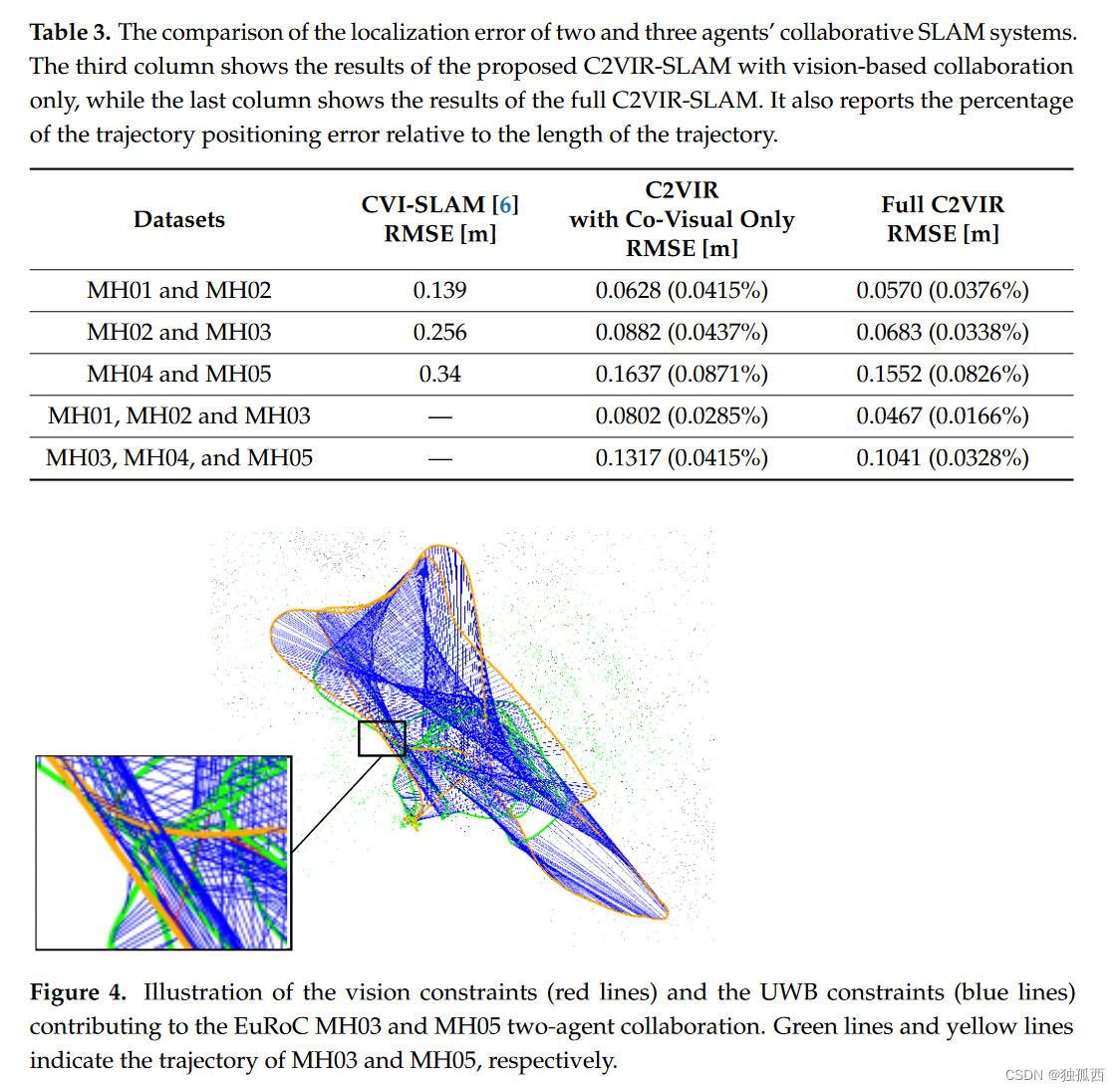
四、实验方案

五、创新总结
声明:本站所有文章,如无特殊说明或标注,均为本站原创发布。任何个人或组织,在未征得本站同意时,禁止复制、盗用、采集、发布本站内容到任何网站、书籍等各类媒体平台。如若本站内容侵犯了原著者的合法权益,可联系我们进行处理。



![[软件工具]文档页数统计工具软件pdf统计页数word统计页数ppt统计页数图文打印店快速报价工具](https://img-blog.csdnimg.cn/direct/09dfbaff3e9a47a9a551dd65fef5d482.jpeg)