沿右墙迷宫算法
引导
目的
原理
总结
根据原理进行程序编写
主机
由于使用的是unity模拟器,那么,主机的配置,和线控模拟中的配置一致。

初始化
有两种方案:一种是运行程序后,直接运行;另一种是运行程序后,按键再运行。(个人更推荐后者,原因:unity模拟器中,需要运行模拟器和viple,存在界面切换,第二种需要用户按键后才开始出现运行效果,即,用户可以看到完整的运行,即使算法有缺陷,都更容易去观察现象,再进行DeBug)
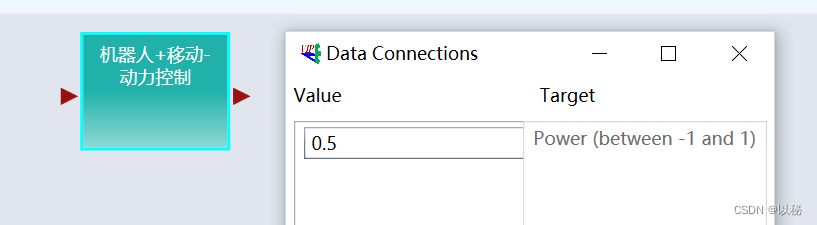
方式1:
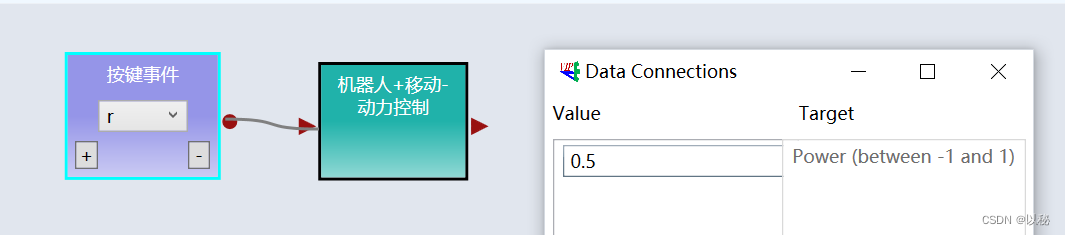
方式2:
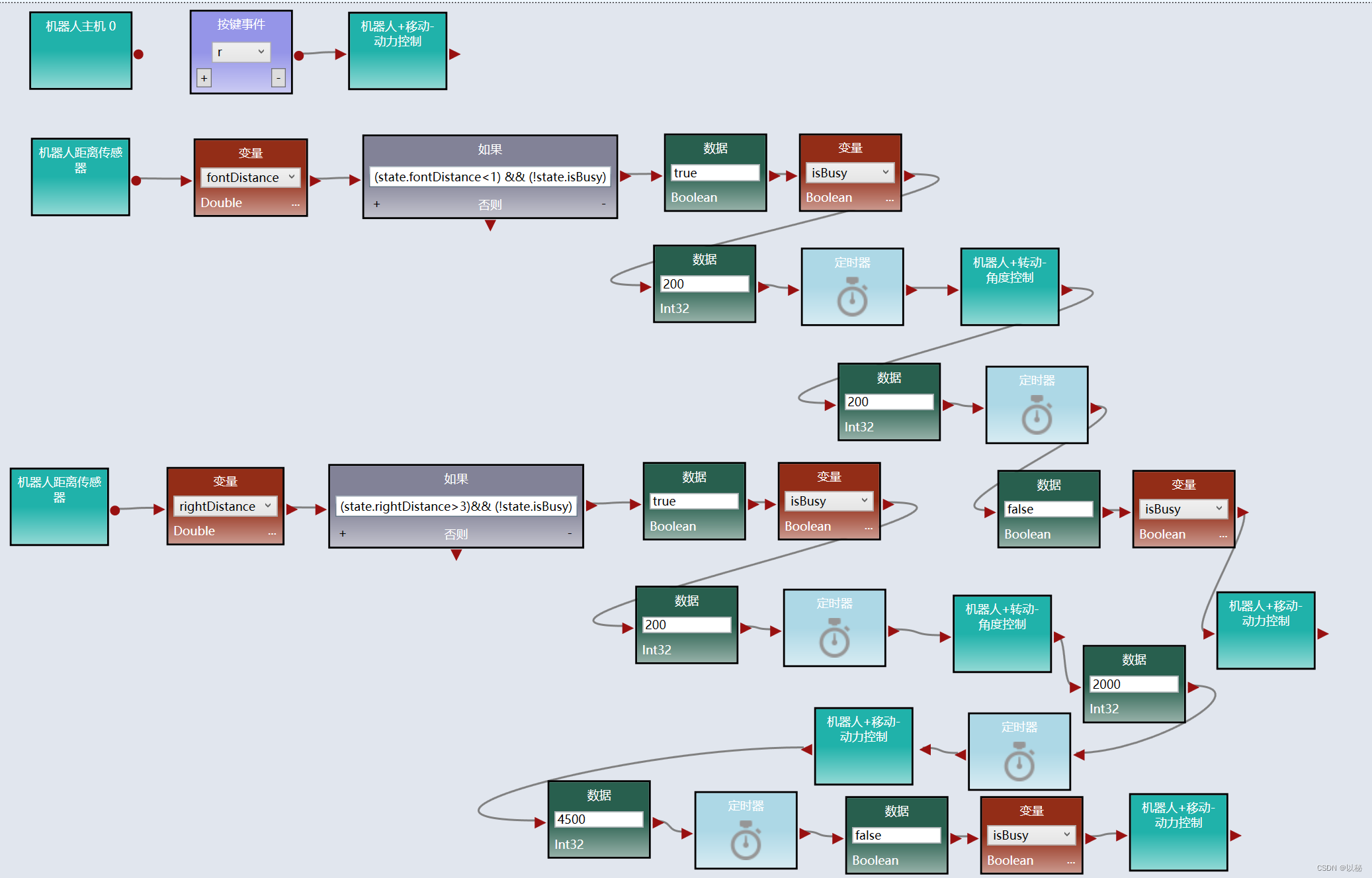
右方距离传感器
前方距离传感器
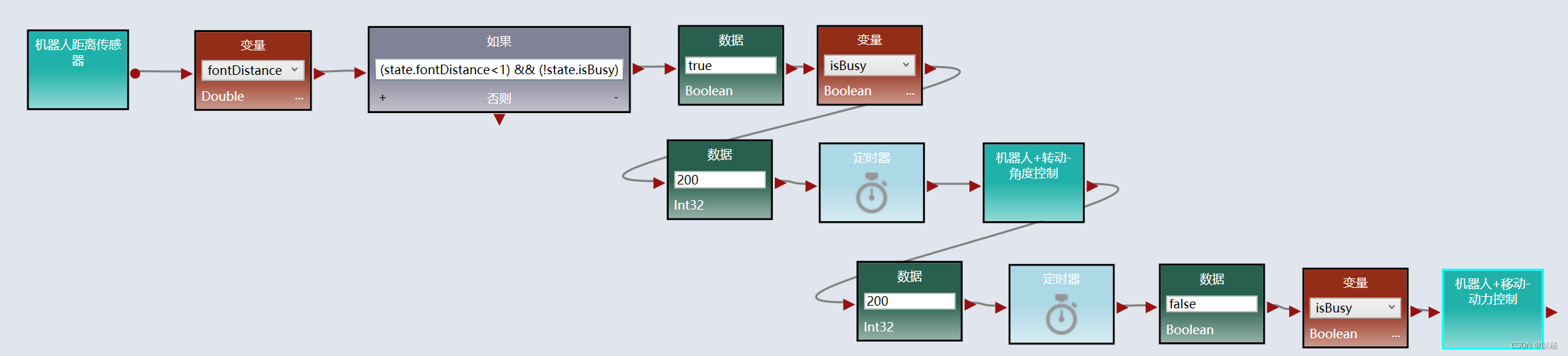
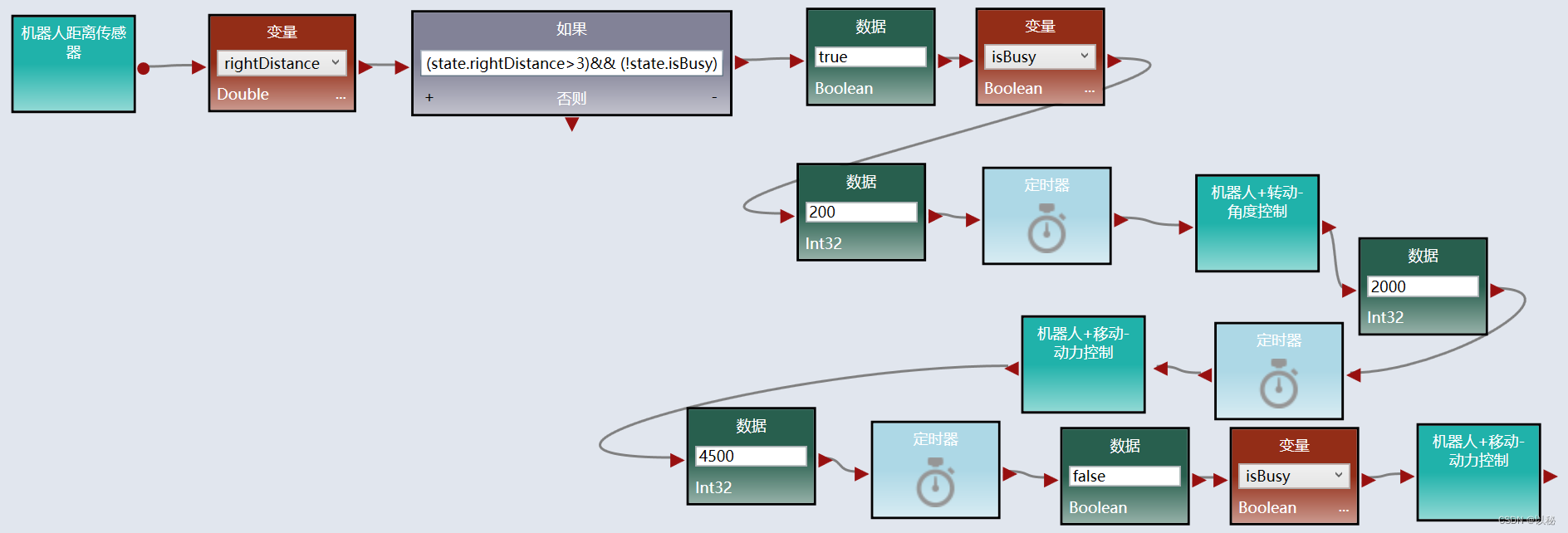
整体逻辑
测试
声明:本站所有文章,如无特殊说明或标注,均为本站原创发布。任何个人或组织,在未征得本站同意时,禁止复制、盗用、采集、发布本站内容到任何网站、书籍等各类媒体平台。如若本站内容侵犯了原著者的合法权益,可联系我们进行处理。