项目场景:
??????????当你新建一个ROS功能包后,打开终端运行这个功能包,rosrun/roslaunch等命令,终端显示找不到文件/过程无法自动补全???????
问题基础
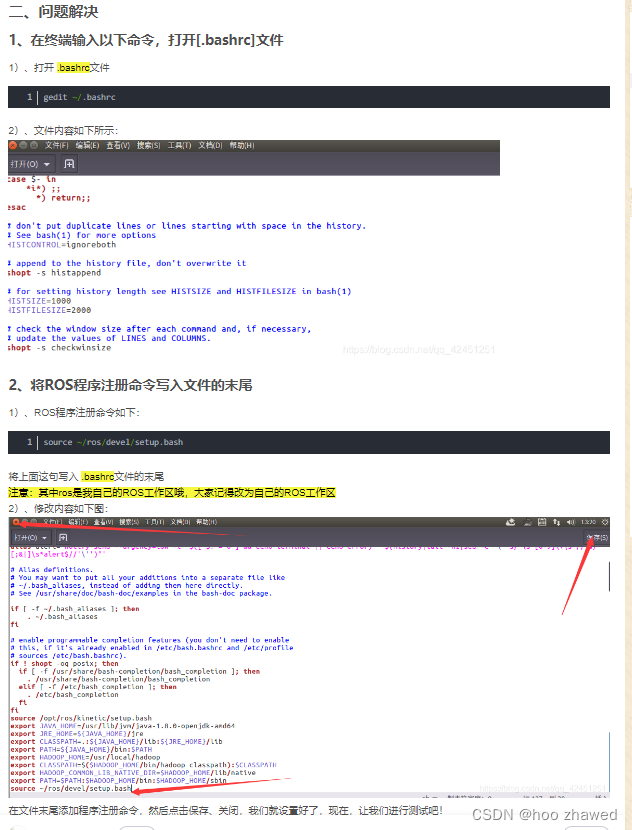
1. bashrc文件作用理解(位于根目录下 ~/.bashrc)
转载:Linux 的.bashrc 文件详解_冠切云之崔嵬的博客-CSDN博客_linux bashrc
linux下的export和source命令_awhuter的博客-CSDN博客_export命令1、source命令source ~/…/../filesource命令作用:source是bash shell的内置命令,在当前shell下读取并执行“file中的命令”通常用于重新执行刚修改完的初始化文档。如在linux中修改了./bashrc启动初始化文件,这时可以用source命令重新执行,使得修改生效而不用注销再次登录。与./直接执行脚本不同,直接执行是在子shell运行的,结果并没有反映到父shell中。source是直接在本shell中运行的,不会启动一个新的shell,所以脚https://blog.csdn.net/qq_41253960/article/details/120286745?ops_request_misc=%257B%2522request%255Fid%2522%253A%2522166865380516782390518360%2522%252C%2522scm%2522%253A%252220140713.130102334..%2522%257D&request_id=166865380516782390518360&biz_id=0&utm_medium=distribute.pc_search_result.none–task–blog-2~all~top_click~default-1-120286745-null–null.142%5Ev63%5Econtrol,201%5Ev3%5Econtrol_2,213%5Ev2%5Et3_esquery_v1&utm_term=source%E5%91%BD%E4%BB%A4&spm=1018.2226.3001.4187(source命令和export命令的作用和理解)
重点:
bash 是一个能解释你输入进终端程序的东西,并且基于你的输入来运行命令,一定程度上支持命令定制。(因此它有相关的书写格式和命令,看看上面的链接2)