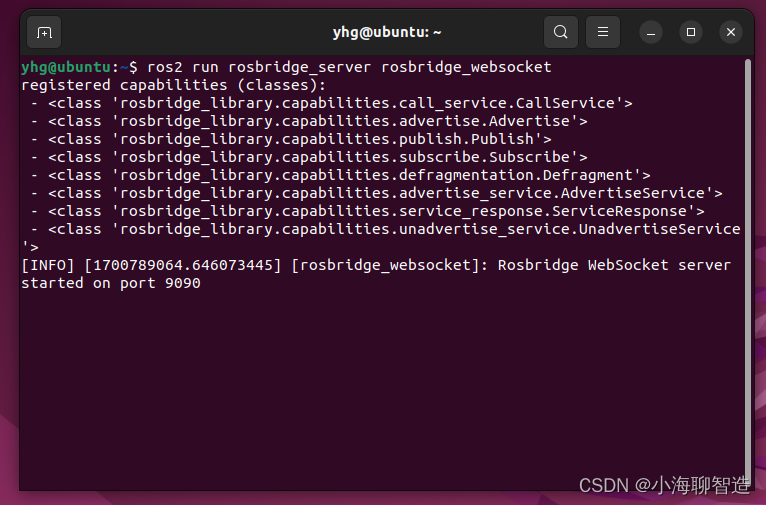
本文介绍: 要启动ROS2中的rosbridge,需要先安装ROS2的rosbridge_suite软件包。注意: 将替换为正在使用的ROS2版本的名称,我的ros2 的版本是humble。启动成功,默认端口 9090。
要启动ROS2中的rosbridge,需要先安装ROS2的rosbridge_suite软件包。使用以下命令安装:
更新过可忽略
安装命令
sudo apt–get install ros—rosbridge-suite
声明:本站所有文章,如无特殊说明或标注,均为本站原创发布。任何个人或组织,在未征得本站同意时,禁止复制、盗用、采集、发布本站内容到任何网站、书籍等各类媒体平台。如若本站内容侵犯了原著者的合法权益,可联系我们进行处理。