本文介绍: 在”Discontinuous Conversion Mode“中,ADC会在每个触发事件(比如定时器溢出、外部触发等)发生时进行一次转换。这种模式适用于需要节省能量或者只在特定事件发生时才需要转换的应用场景。在这种模式下,ADC会在完成转换后自动进入低功耗模式,直到下一个触发事件发生。在这种模式下,ADC只有在触发条件满足时才会进行转换,而不是连续地进行转换。这种模式的工作原理在不同的微控制器或者ADC芯片上可能会有所不同,因此具体的工作方式需要参考相应的数据手册或者技术文档。
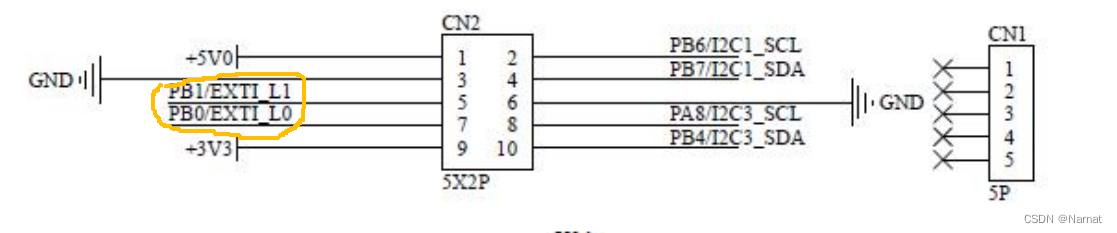
原理图:
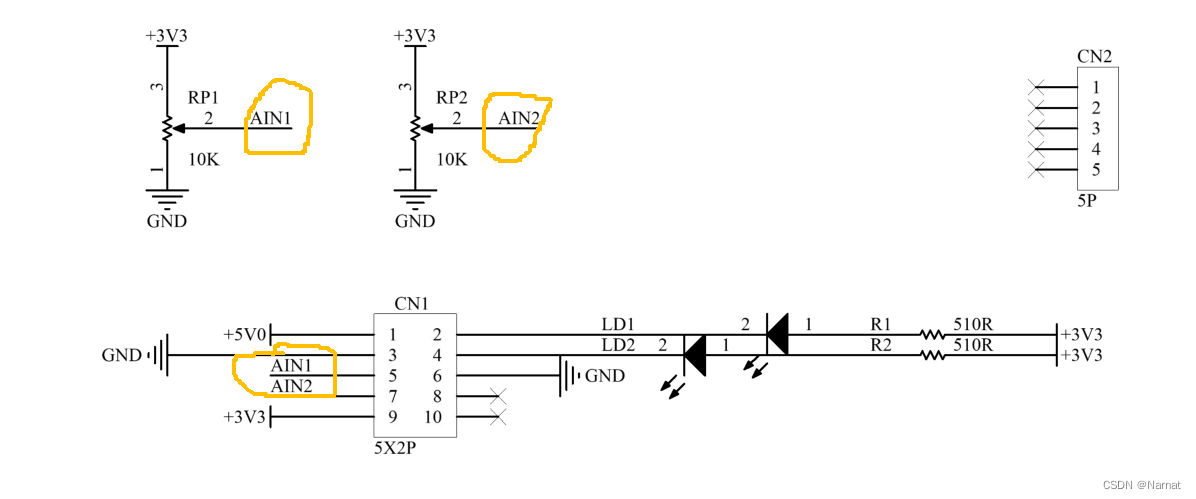

RP1和RP2分别对应着AIN1和AIN2,扭动它们,其对应滑动变阻器阻值也会变化

CubMx配置:
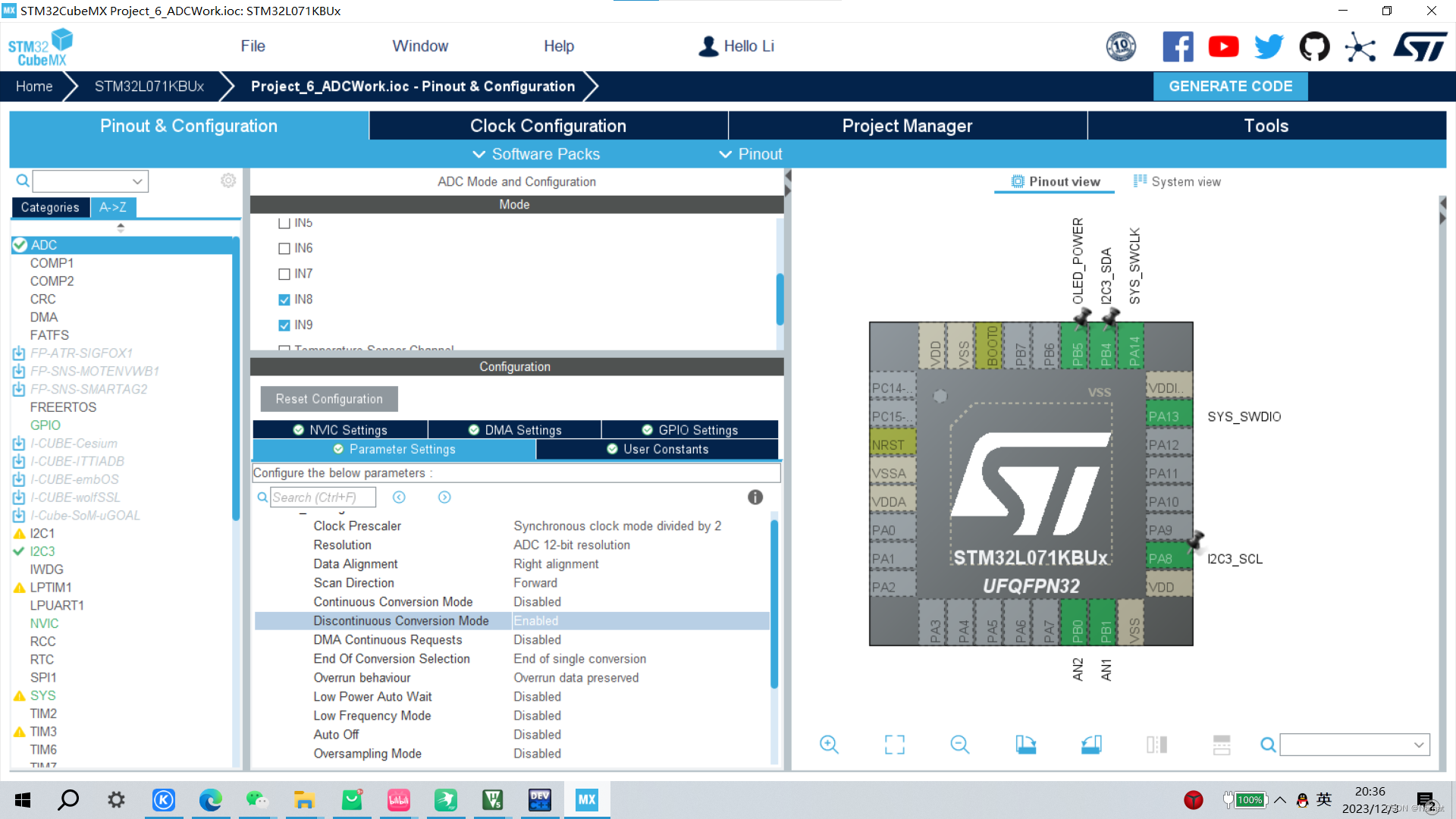
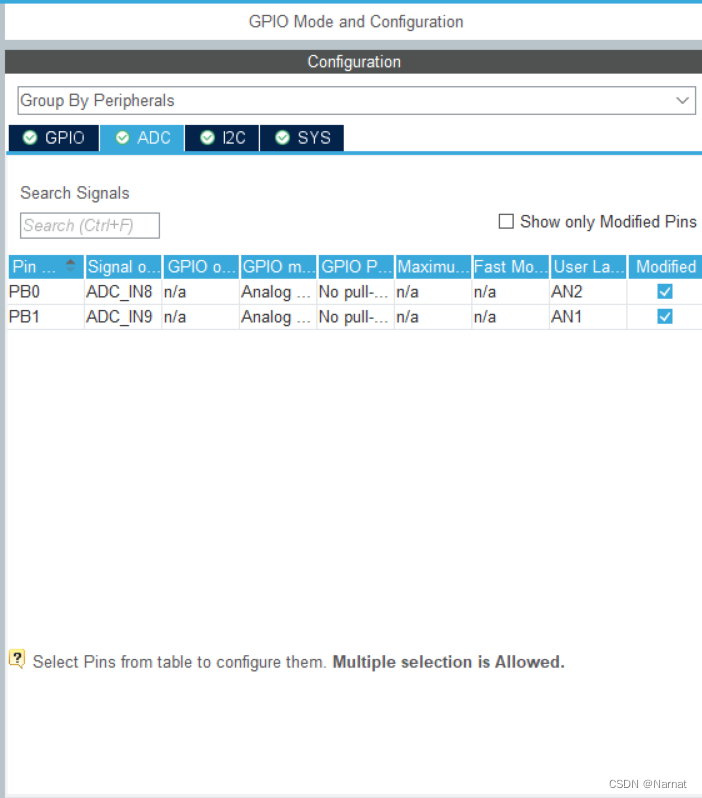
ADC通道IN8和IN9才对应PB0和PB1
keil配置:
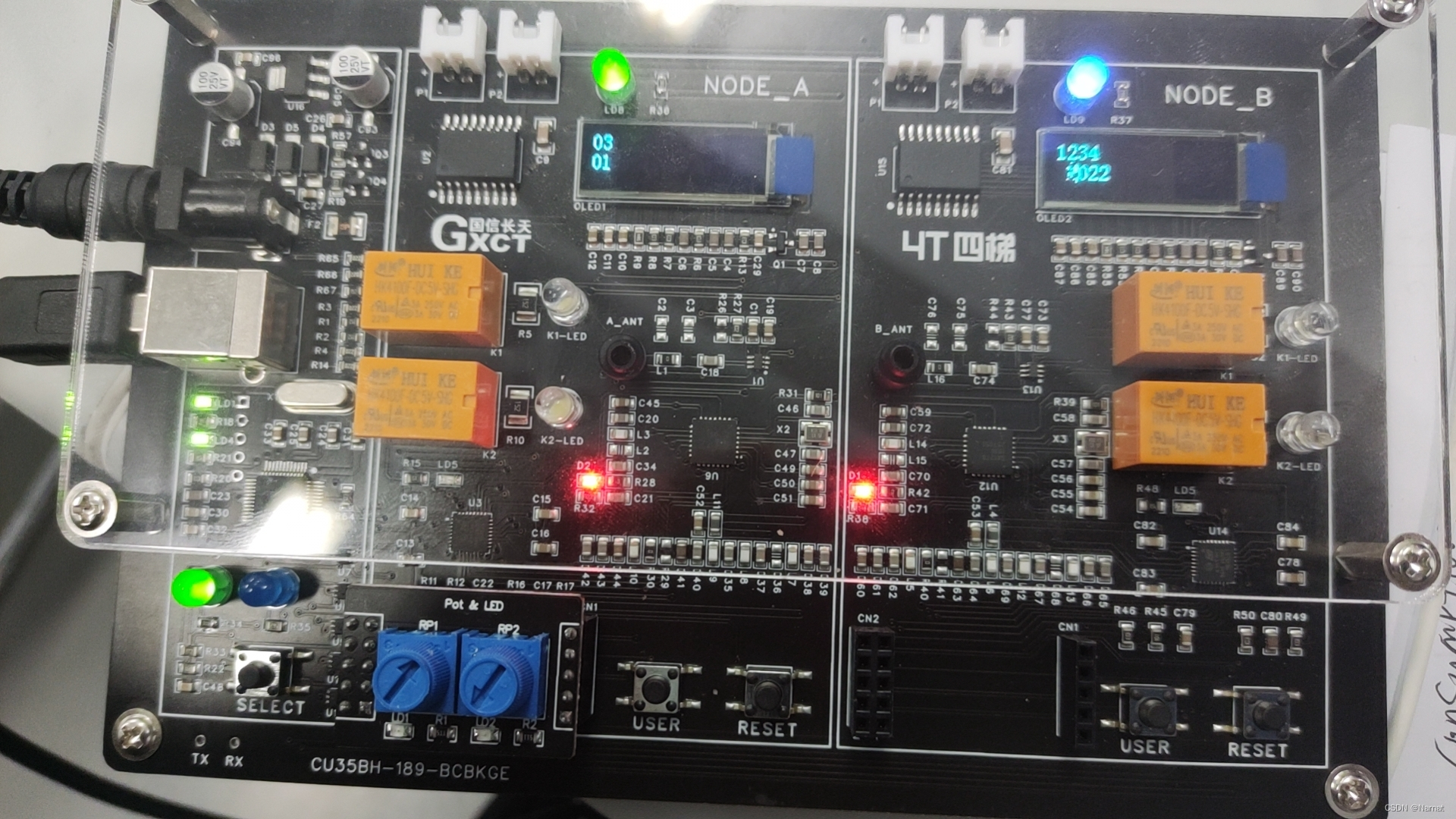
效果:
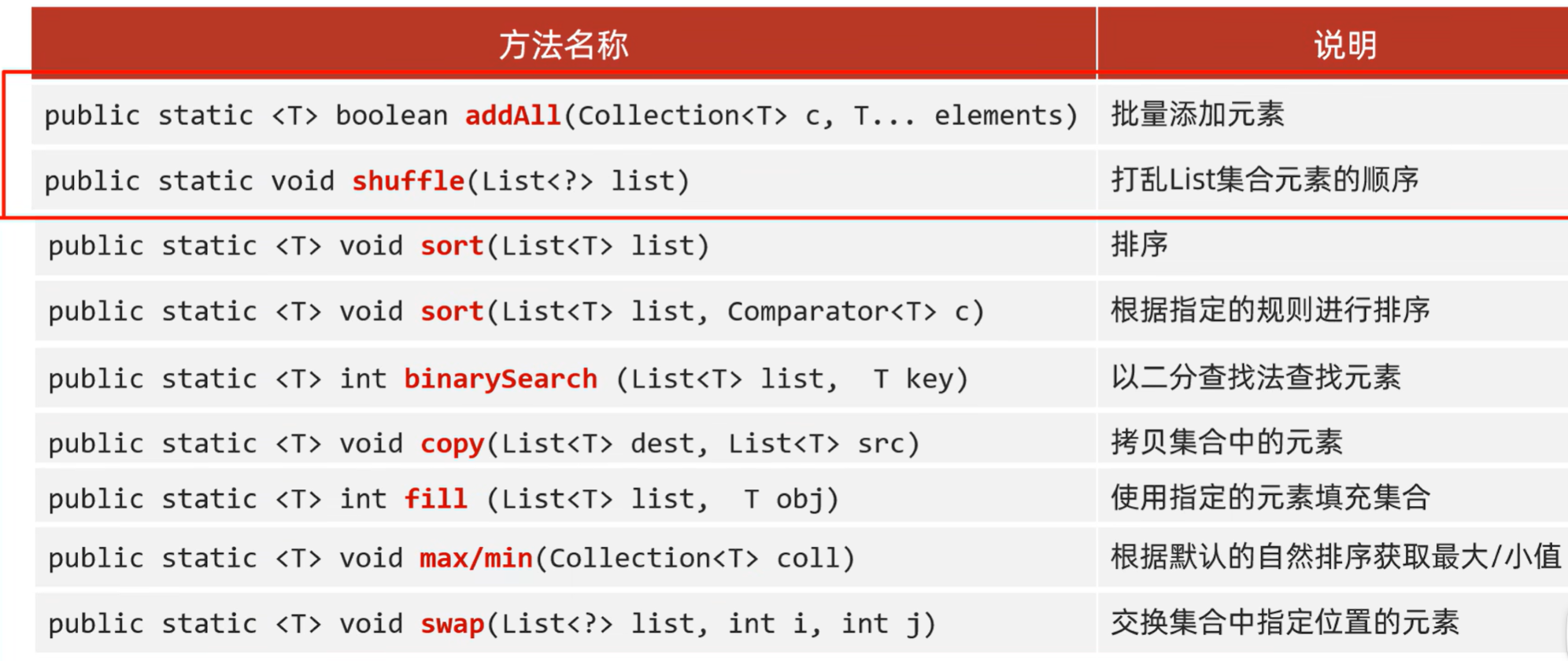
拓展:
声明:本站所有文章,如无特殊说明或标注,均为本站原创发布。任何个人或组织,在未征得本站同意时,禁止复制、盗用、采集、发布本站内容到任何网站、书籍等各类媒体平台。如若本站内容侵犯了原著者的合法权益,可联系我们进行处理。