本文介绍: ros-foxy–desktop会含有ROS, RViz, demos, tutorials。第二个窗口,把鼠标点在这个窗口,上下左右键可以控制小乌龟的移动。添加DNS144.144.144.144。Ubuntu20.04安装ROS2。
官方参考文章
Ubuntu (Debian) — ROS 2 Documentation: Foxy documentation
curl密钥问题
添加DNS144.144.144.144

安装桌面版
ros-foxy-desktop会含有ROS, RViz, demos, tutorials
运行talker-listener示例

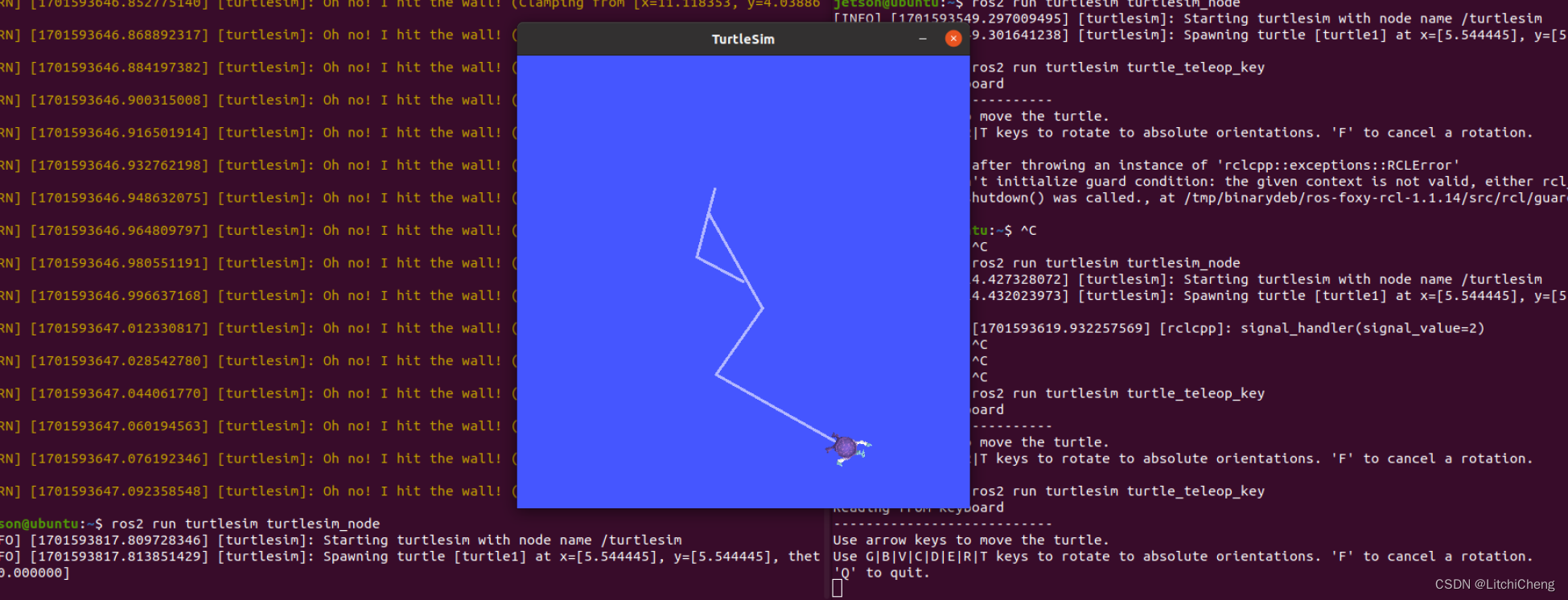
运行经典小乌龟
第二个窗口,把鼠标点在这个窗口,上下左右键可以控制小乌龟的移动
卸载
视频
声明:本站所有文章,如无特殊说明或标注,均为本站原创发布。任何个人或组织,在未征得本站同意时,禁止复制、盗用、采集、发布本站内容到任何网站、书籍等各类媒体平台。如若本站内容侵犯了原著者的合法权益,可联系我们进行处理。