摘要:覆盖路径规划包括找到覆盖某个目标区域的每个点的路线。近年来,无人机已被应用于涉及地形覆盖的多个应用领域,如监视、智能农业、摄影测量、灾害管理、民事安全和野火跟踪等。本文旨在探索和分析文献中与覆盖路径规划问题中使用的不同方法相关的现有研究,特别是使用无人机的研究。考虑到目标区域的信息可用性,我们总结了简单的几何飞行模式和更复杂的基于网格的解决方案。调查的覆盖方法根据经典分类法进行分类,如无分解、精确细胞分解和近似细胞分解。这篇综述还考虑了感兴趣区域的不同形状,如矩形、凹多边形和凸多边形。还介绍了通常用于评估覆盖任务成功与否的性能指标。
关键词:无人机;覆盖路径规划;地形覆盖率;精确细胞分解;近似细胞分解
1.引言
无人机已越来越多地应用于广泛的应用领域,如监控、智能农业、摄影测量、灾害管理、民用安全、野火跟踪、云监控、结构监督和电力线检查。无人机由空中平台组成,飞行器上没有飞行员。这种平台由人工远程手动操作,但它们也执行自动预编程飞行。可以使用与机载传感器集成的智能系统执行自主飞行。
覆盖路径规划(CPP)问题被归类为机器人学中的一个运动规划子主题,其中有必要为机器人建立一条路径,以探索给定场景中的每个位置。尽管这种类型的空中平台在自主飞行方面取得了技术进步,但重要的是要强调,由于安全措施,每架无人机的起飞、任务执行和着陆阶段通常由两人协助。飞行员监督任务,在飞行过程中发生故障或紧急情况时,可以将飞行模式更改为手动模式,而基地操作员在任务执行过程中监控导航数据,如高度变化和电池放电。
1.1.无人机分类
无人机可分为两种主要类型,固定翼和旋转翼。考虑到控制和制导系统,这两种类型都具有特定的优势和挑战。固定翼无人机具有刚性机翼和翼型,可根据前进空速产生的升力进行飞行。导航控制是通过机翼(副翼、升降舵和方向舵)上的控制面获得的。空气动力学支持更长的耐力飞行和游荡,也允许高速运动。此外,与旋翼飞行器相比,这些飞行器可以携带更重的有效载荷。然而,这些平台需要跑道才能起飞和降落,并且无法执行悬停任务,因为它们在执行任务时需要不断移动。
旋转翼使用旋转叶片具有机动性优势。这些平台能够执行垂直起降(VTOL)、低空飞行和悬停任务。旋转叶片的使用产生空气动力学推力,不需要相对速度。这种类型的空中平台也可以分为单旋翼(直升机)和多旋翼(四旋翼和六旋翼)。
单旋翼有两个旋翼,主旋翼用于导航,尾旋翼用于控制航向。这些飞行器通常能够垂直起飞和降落,它们不需要叶片上的气流就可以向前移动。相反,叶片本身会产生所需的气流。与多旋翼发动机相比,燃气发动机能够实现更长的续航里程。这种类型的飞行器可以携带高有效载荷,如传感器和机械手,同时执行悬停任务和户外任务中的长时间飞行。然而,这些平台具有机械复杂性和较高的成本。
根据转子叶片的数量,多转子可分为多个子类。最常见的是四旋翼机和六旋翼机,但也开发了三旋翼机和八旋翼机。多旋翼是快速灵活的平台,能够执行要求苛刻的机动。它们还能够悬停或沿着目标移动。然而,这些平台的有效载荷和续航能力有限。机械和电气的复杂性相当低,因为这些部件是在飞行和电机控制器中抽象出来的。
还有混合动力无人机,它是一种特定类型的空中平台,既有固定翼的优点,也有旋翼的优点,因此具有垂直起降的能力,飞行速度快,飞行时间长。这些无人机可分为敞篷无人机和尾座无人机。前者由一个混合平台组成,该平台执行基本机动,使飞机基准线保持在水平方向。后者是一种能够垂直起飞和降落在尾部的平台,向前倾斜以实现水平飞行[13]。最后,考虑到任务要求,如高度和续航能力,在文献中可以找到与无人机相关的其他类型的分类。在这些情况下,空中平台可以根据低、中、高海拔进行分类,也可以考虑短续航和长续航。
1.2.现有综述概述
文献中介绍了一系列与无人机控制、感知和制导相关的研究,如低成本无人机的系统识别方法、在有障碍物的环境中有和没有微分约束的轨迹规划、不确定条件下的无人机自主制导,直升机导航和控制技术以及无人机的感知和状态估计。
Choset介绍了一项关于移动机器人CPP的调查,作者将这些方法分为启发式方法或完全方法。在启发式方法中,机器人遵循一组定义其行为的简单规则,但这种方法不能保证覆盖成功。另一方面,完整的方法可以使用环境的单元分解来提供这些保证,该分解包括将空间离散化为单元,以简化每个子区域中的覆盖。作者提到的另一个重要问题是飞行时间,使用多个机器人可以最大限度地减少飞行时间,并减少转弯次数。最后,作者重点介绍了现有的环境信息。几种方法承认机器人先前关于搜索区域的知识(离线),而基于传感器的方法在覆盖期间实时获取此类信息(在线)。
关于CPP的最新调查提出了几种主要使用陆地车辆执行任务的方法和技术[21]。考虑到不确定性下的勘探,Juliá等人[22]提出了一项关于未知环境测绘策略的研究。机器人应该自主探索环境,收集数据并绘制导航地图。在缺乏全球定位信息的情况下,有必要使用同步定位和映射技术不断校正机器人的定位和方位估计。可以使用多个机器人来减少探索时间或提高地图质量,但需要协调策略。在这种策略中,机器人可以共享感知并构建工作空间的公共地图。这个全局地图可以以集中式或分布式的方式构建。
1.3本综述的动机
与无人机相关的现有调查涉及控制、感知和引导等重要问题。一些综述涉及CPP问题,但仅考虑陆地车辆,并简要提及无人机作为这些车辆的延伸。尽管在之前的调查中修订的陆地勘探技术可以扩展并应用于无人机,但在处理飞行器时必须考虑几个额外的方面,如飞行器的物理特性、续航能力、机动性限制、有效载荷受限、环境外部条件等。机载摄像头和传感器可以增加无人机的重量并降低续航能力,这是非常有限的,尤其是在多旋翼中。在这种无人机中,续航时间约为20-25分钟,即使在2018年发布的更复杂的机型中也是如此。此外,转弯机动和风场]增加了户外任务的能耗。
本文对覆盖路径规划进行了综述。我们的综述仅考虑与无人机相关的方法。采用Choset定义的经典分类法,根据所采用的细胞分解技术对现有方法进行分类。考虑了无分解的方法和使用精确和近似细胞分解的方法。后一种方法,也称为基于网格的方法,分为两个子部分,即完整信息和部分信息。完整信息小节探讨了保证覆盖所有分解细胞的任务完整性的算法,而部分信息小节介绍了在不确定性下进行覆盖的仿生方法。这篇综述考虑了目标区域的不同形状,包括矩形、凹面和凸面多边形。还根据可用信息对这些场景进行分类,以执行覆盖。此外,我们还探讨了通常用于评估覆盖任务成功与否的性能指标。
本篇综述组织如下:第2节讨论了覆盖路径规划问题,描述了目标区域的特征以及在飞行规划中如何处理这些区域。介绍了用于分割和离散目标区域的不同分解技术以及性能指标。第3节探讨了在不使用分解技术的目标区域中采用的简单飞行模式。第4节介绍了使用精确单元分解离散化的目标区域的覆盖解决方案。第5节介绍了使用近似单元分解离散为网格的感兴趣区域的覆盖方法。第6节总结了总体分析,强调了修订CPP方法的主要优点和缺点。第7节总结了综述,提出了未来在使用无人机进行覆盖路径规划方面可能存在的差距。
2.覆盖路径规划
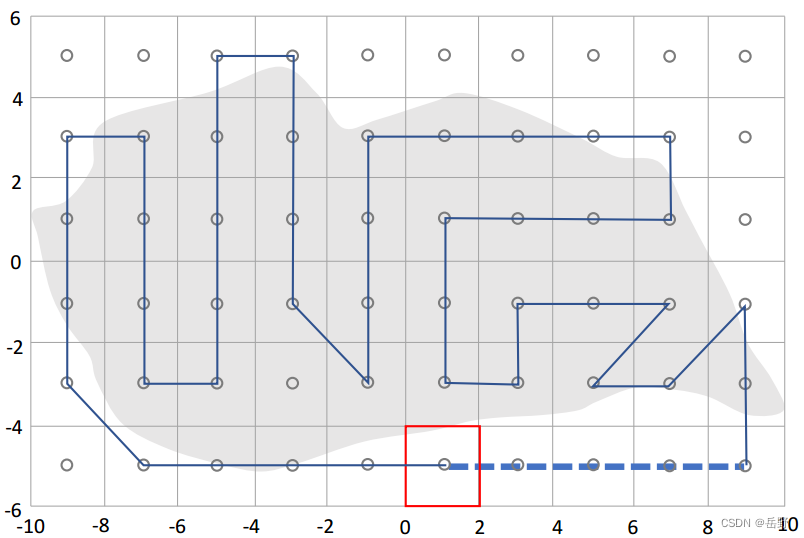
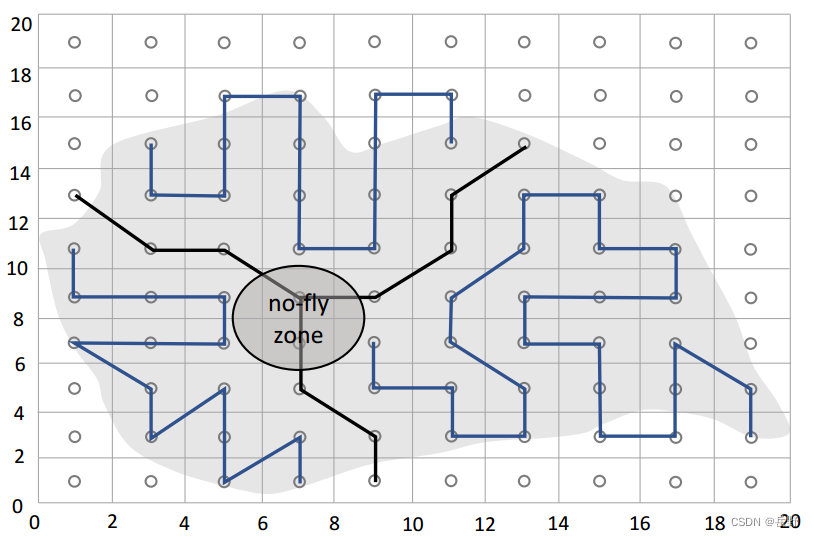
给定由智能体的自由空间及其边界组成的目标区域,CPP问题包括规划一条覆盖整个目标环境的路径,同时考虑到智能体的运动限制和传感器的特性以及避免碰撞障碍物。在空域环境中,工作空间障碍物可以表示为无人机在规划阶段中不应考虑的禁飞区(NFZ),例如机场或危险建筑附近的区域。
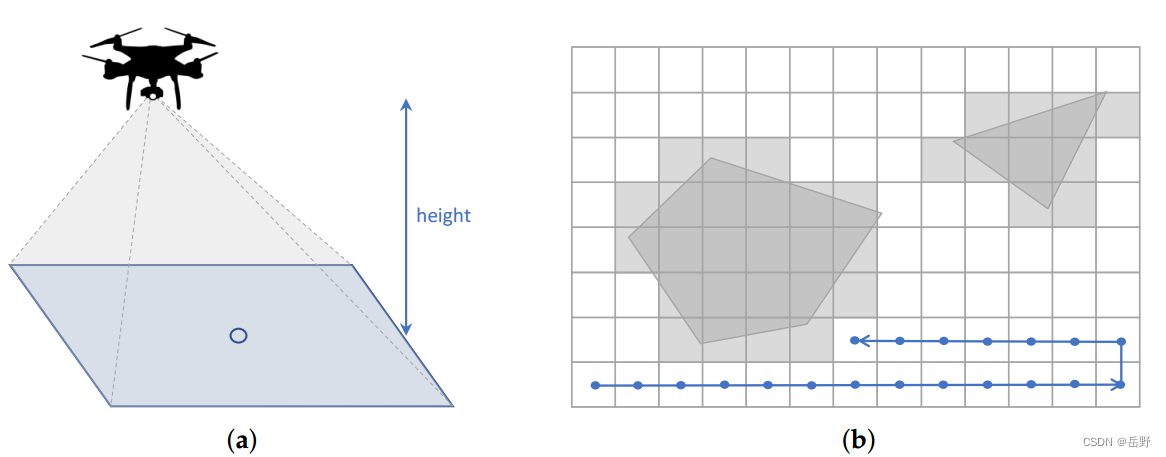
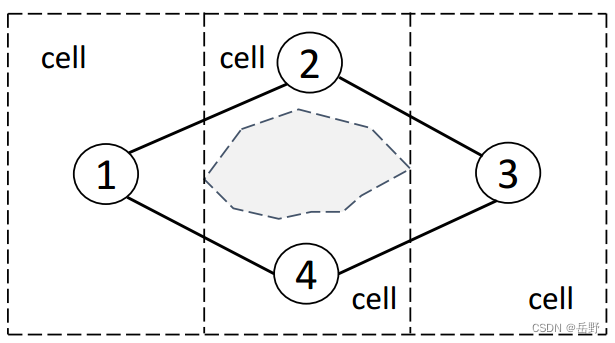
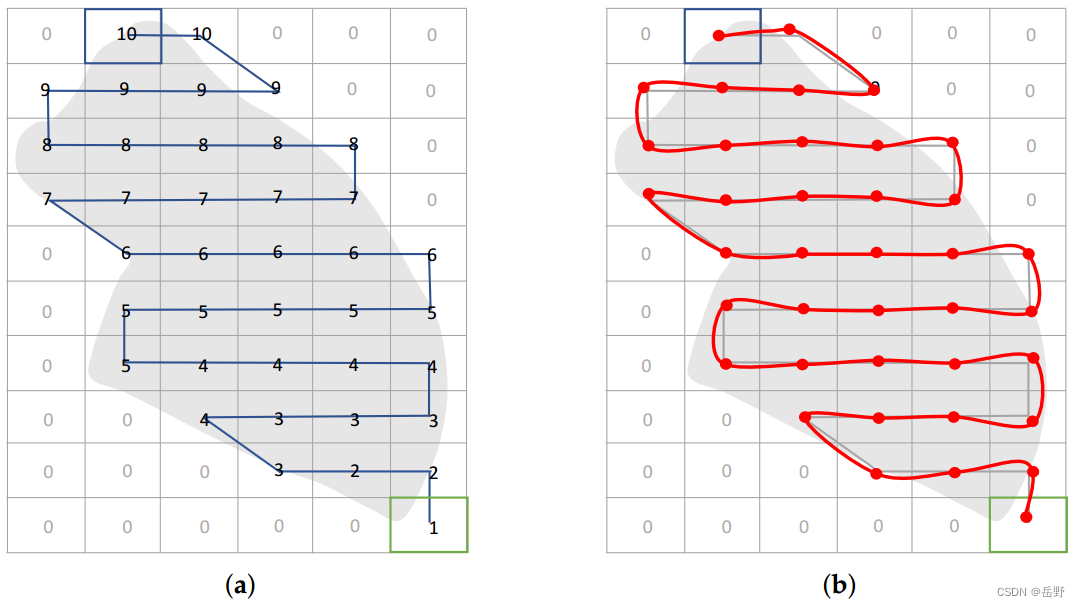
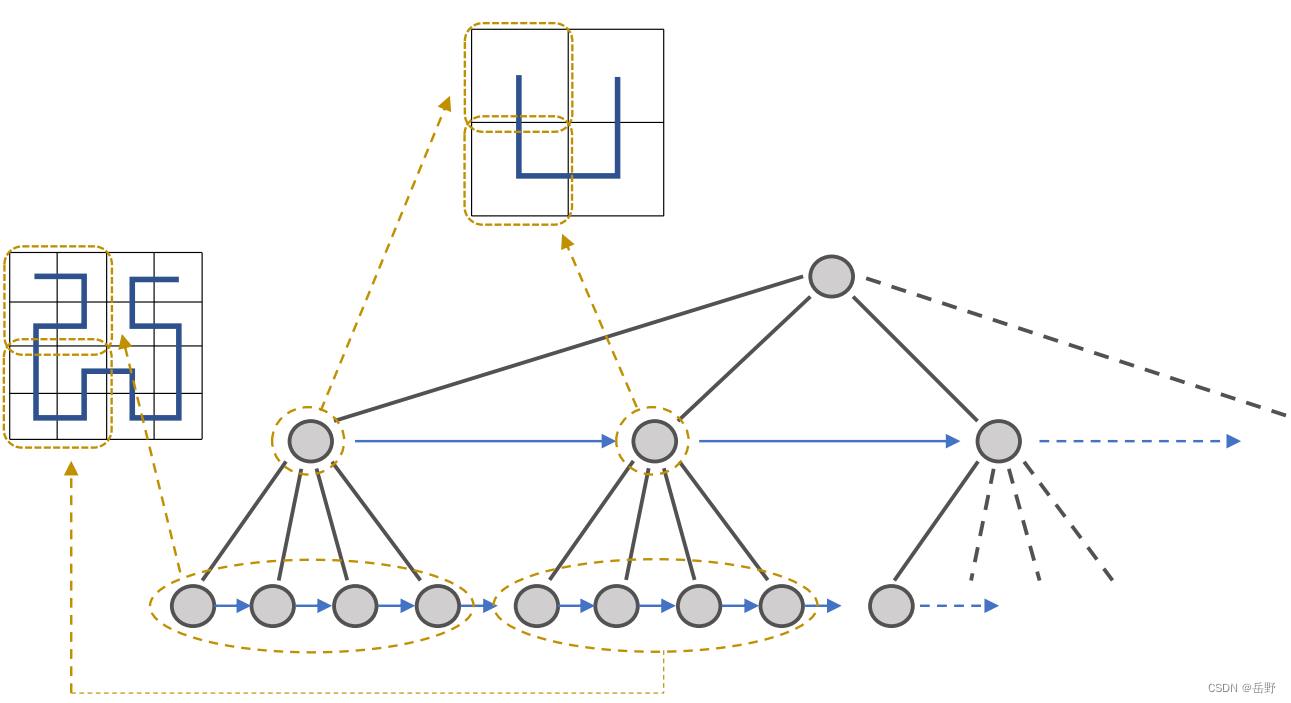
目标环境通常使用分解技术划分为称为单元的不相交区域。单元的大小和分辨率可能会根据分解的类型而变化,并且应该应用特定的策略以确保完全覆盖。对于较大的单元,需要多次运动才能完全覆盖一个单元,而对于较小的单元,一次运动就足够了。这些单元通常具有与智能体相同的大小(地面覆盖)或与传感器的范围(空中覆盖)成比例,仅代表投影路径中的一个点。CPP问题将在下一小节中进一步探讨,包括目标区域的定义、细胞分解技术、性能指标和信息可用性。
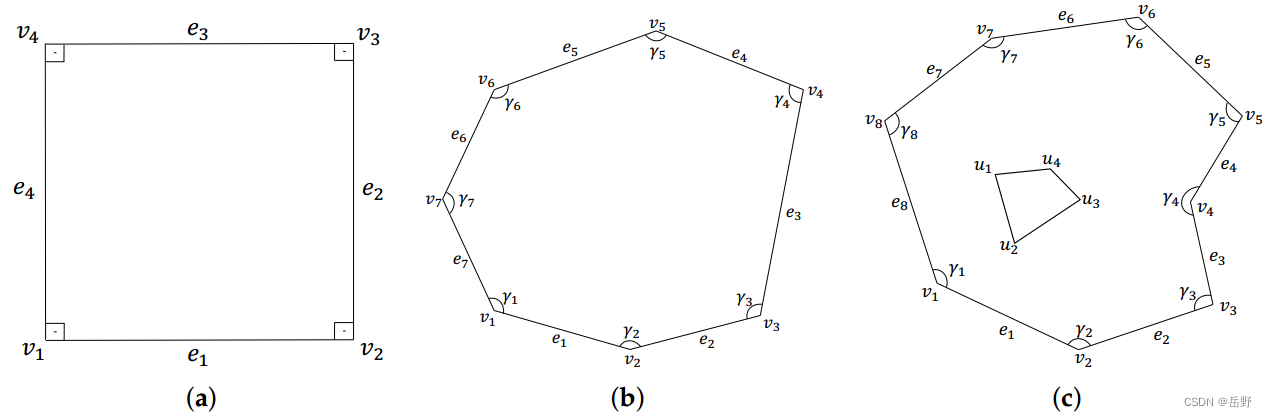
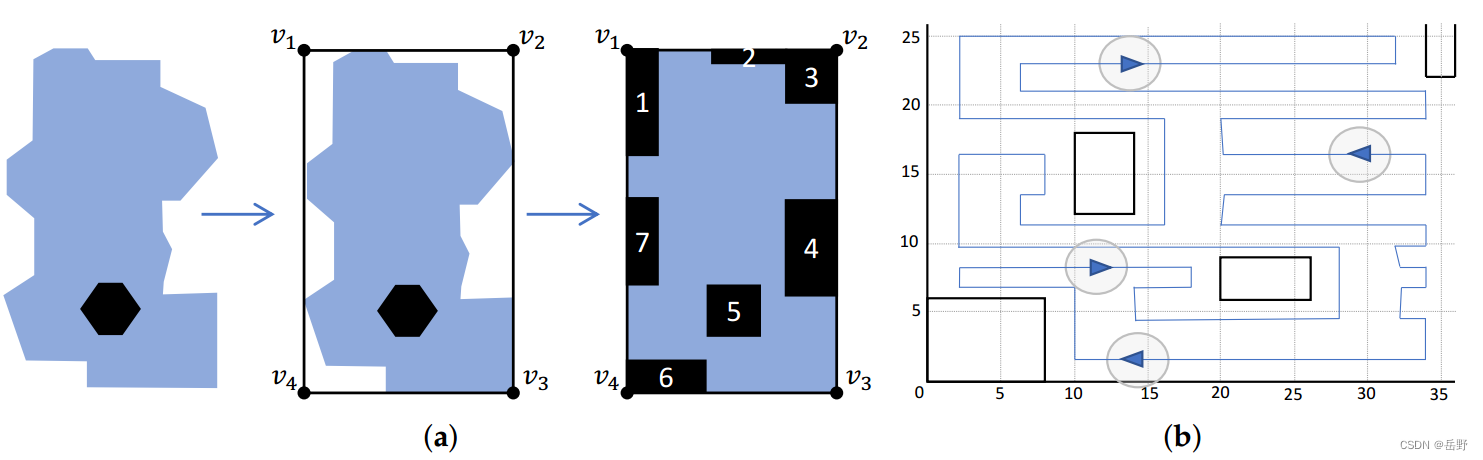
2.1 目标区域
目标区域可以由
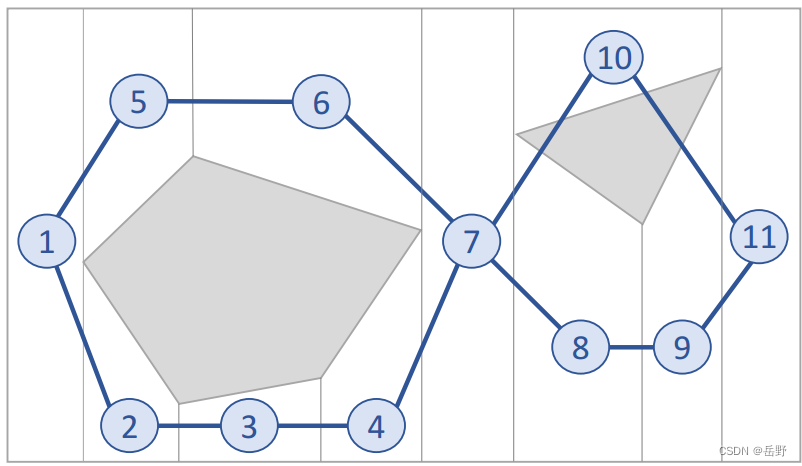
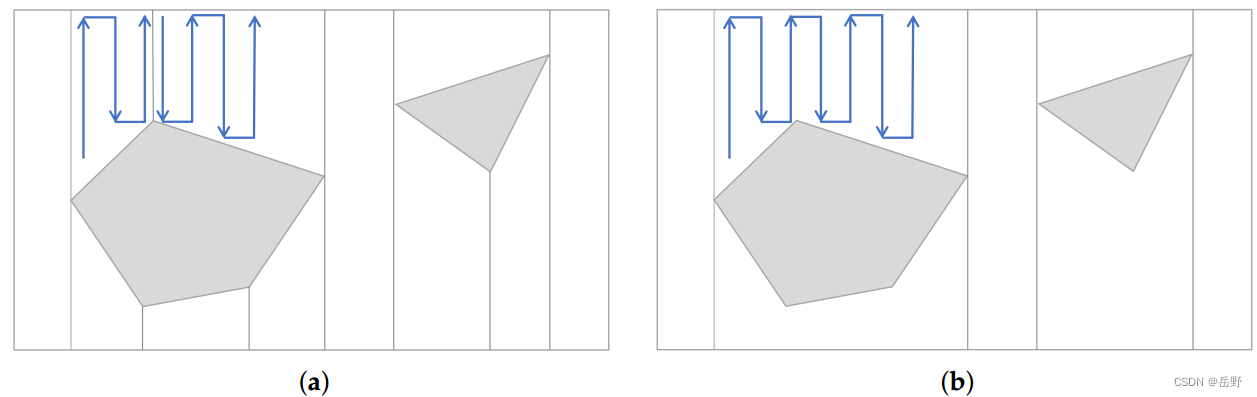
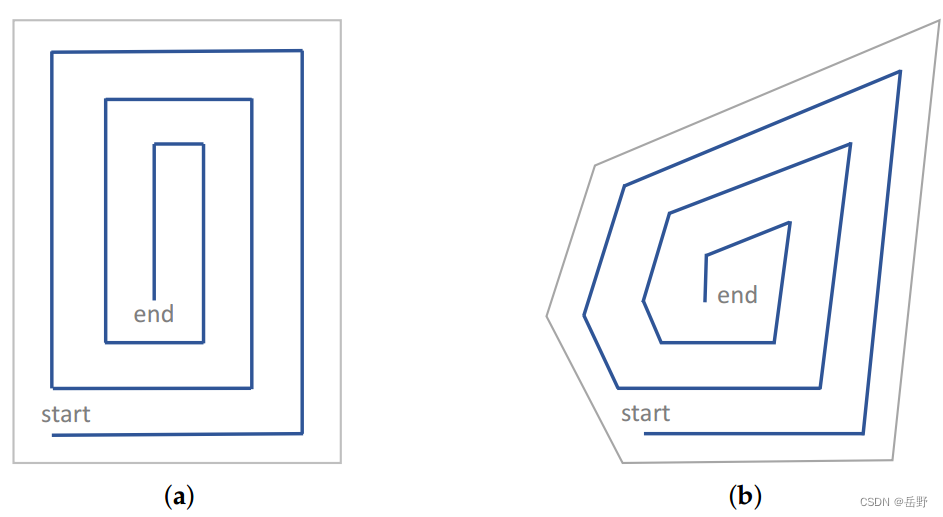
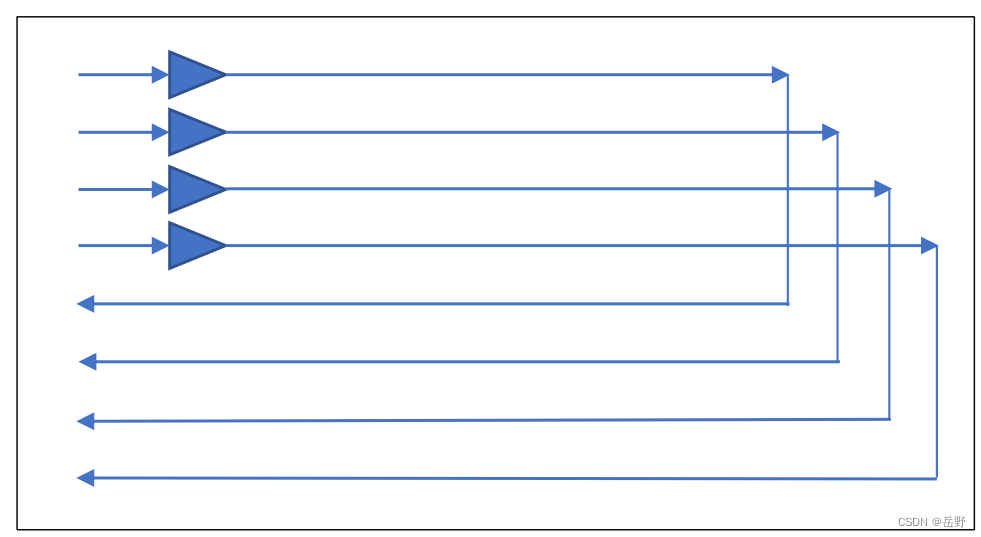
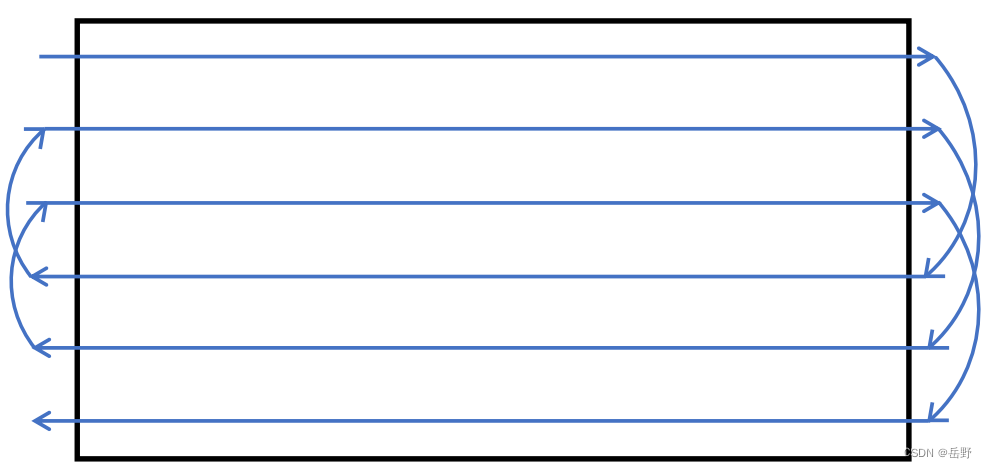
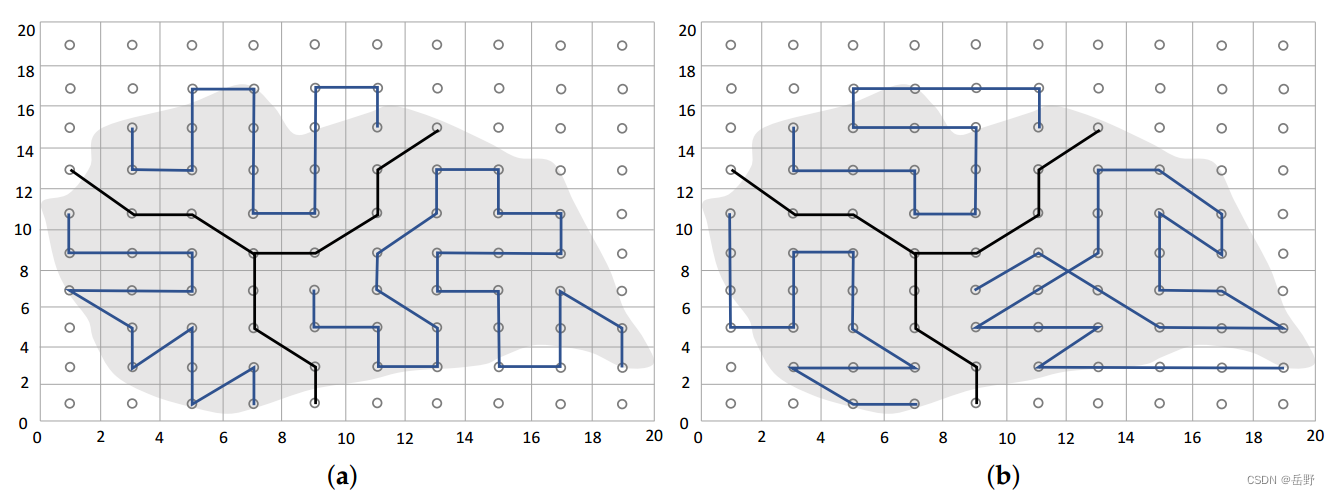
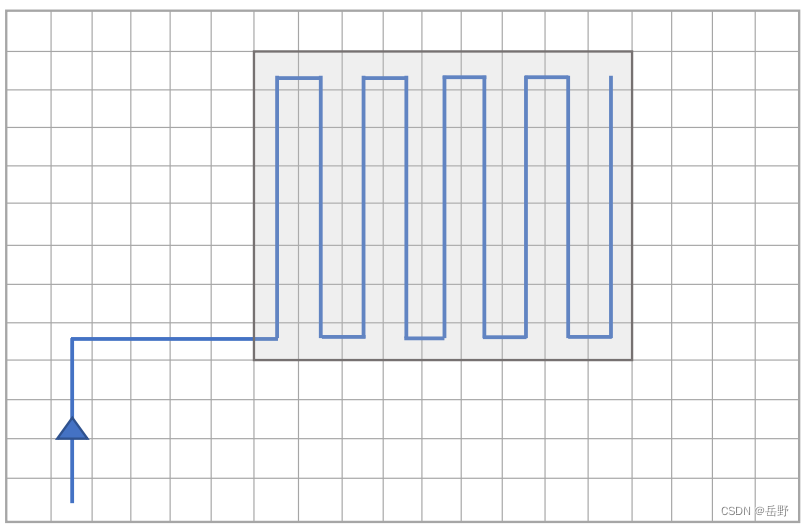
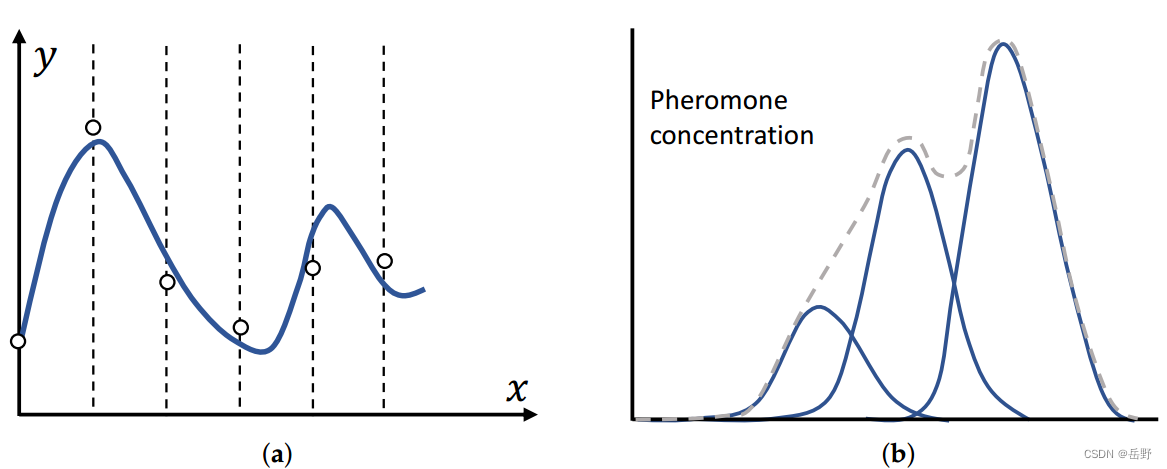
 根据目标区域的复杂性,简单的飞行模式可能会产生低效的轨迹,需要后处理阶段来调整航路点位置和它们之间的角度,以克服
根据目标区域的复杂性,简单的飞行模式可能会产生低效的轨迹,需要后处理阶段来调整航路点位置和它们之间的角度,以克服