知识储备
- unity官方教程: https://github.com/Unity-Technologies/Unity-Robotics-Hub
- Win11家庭版开启HyperV: https://zhuanlan.zhihu.com/p/577980646
- HyperV安装Ubuntu: https://blog.csdn.net/xianzhan_/article/details/116177434
我安装的是WSL中的18.04,没有自己下载iso文件。 - Ubuntu安装ROS: https://wiki.ros.org/melodic/Installation/Ubuntu
- catkin_make: command not found 解决办法:
https://blog.csdn.net/qq_41134436/article/details/107480251 - Unity导入URDF模型: https://blog.csdn.net/gls_nuaa/article/details/128034844
前期准备
ROS部分
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
sudo apt install curl
curl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | sudo apt-key add -
sudo apt update
sudo apt install ros-melodic-desktop
source /opt/ros/melodic/setup.bash
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc
mkdir ~/catkin_ws
cd ~/catkin_ws/src
git clone https://github.com/Unity-Technologies/ROS-TCP-Endpoint.git
cd ~/catkin_ws/
catkin_make
- 安装其他相关包
sudo apt-get update && sudo apt-get upgrade
sudo apt-get install python-pip ros-melodic-robot-state-publisher ros-melodic-moveit ros-melodic-rosbridge-suite ros-melodic-joy ros-melodic-ros-control ros-melodic-ros-controllers ros-melodic-tf2-web-republisher
sudo -H pip install rospkg jsonpickle
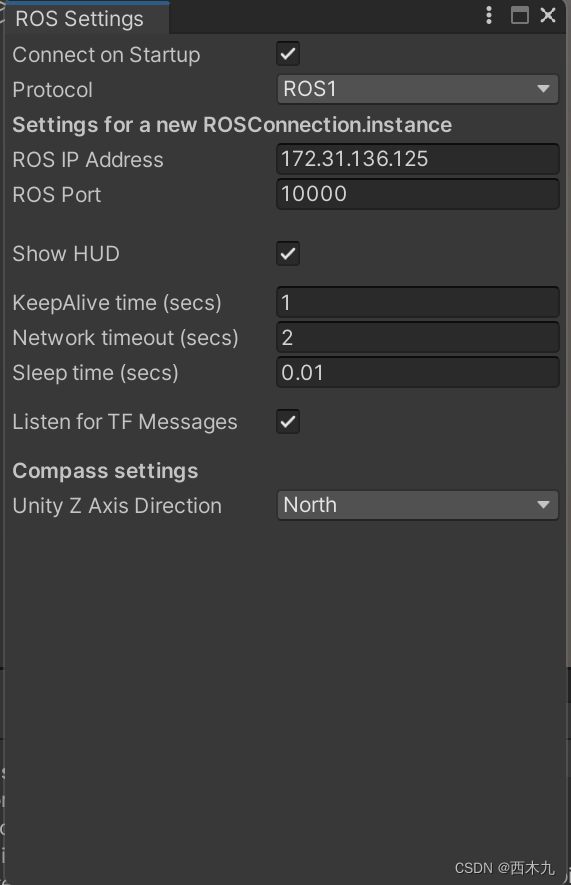
Unity部分
连接测试
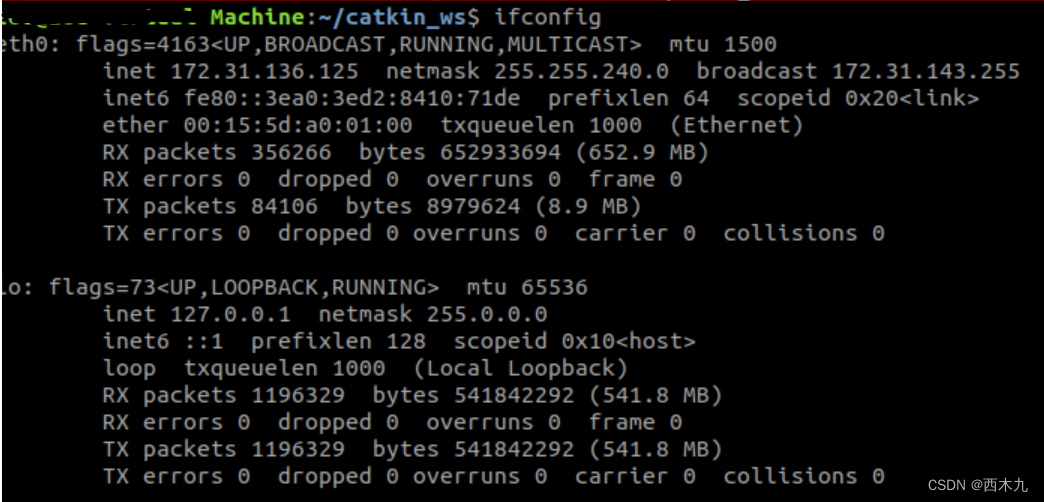
虽然官方教程(用docker)给出的端口号是 127.0.0.1
但是我们连接虚拟机 要用的是另上面的一个端口号
2. ROS端
roslaunch ros_tcp_endpoint endpoint.launch

原文地址:https://blog.csdn.net/weixin_45654152/article/details/134734831
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。
如若转载,请注明出处:http://www.7code.cn/show_39580.html
如若内容造成侵权/违法违规/事实不符,请联系代码007邮箱:suwngjj01@126.com进行投诉反馈,一经查实,立即删除!
声明:本站所有文章,如无特殊说明或标注,均为本站原创发布。任何个人或组织,在未征得本站同意时,禁止复制、盗用、采集、发布本站内容到任何网站、书籍等各类媒体平台。如若本站内容侵犯了原著者的合法权益,可联系我们进行处理。