本文介绍: AR Tag 是一种用于增强现实(AR)应用中的视觉标记,用于跟踪和定位虚拟物体在现实世界中的位置。AR Tag由黑白正方形图像表示,图像内部有黑色边框中的某些图案。它与我们经常用到的二维码长得类似,原理其实也一样,但其编码系统和二维码有很大的区别。AR Tag 要用于做位姿识别,即通过相机图像识别 AR Tag 的位置和姿态,从而实现对AR标记物的定位。与二维码相比,AR Tag 的图案相对简单,仅包含黑白色块以及一些辅助图形,编码信息相对较少,因此其图案识别度更高。
1.定义
AR Tag 是一种用于增强现实(AR)应用中的视觉标记,用于跟踪和定位虚拟物体在现实世界中的位置。 AR Tag由黑白正方形图像表示,图像内部有黑色边框中的某些图案。它与我们经常用到的二维码长得类似,原理其实也一样,但其编码系统和二维码有很大的区别。
AR Tag 要用于做位姿识别,即通过相机图像识别 AR Tag 的位置和姿态,从而实现对AR标记物的定位。与二维码相比,AR Tag 的图案相对简单,仅包含黑白色块以及一些辅助图形,编码信息相对较少,因此其图案识别度更高。相比之下,二维码的图案复杂度较高,需要包含大量的信息,这会使得二维码在图像失真或光线不足等情况下更难以识别。
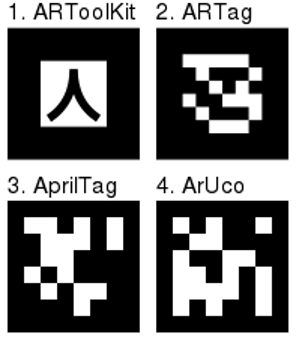
AR Tag 的类型有很多,他们使用不同的标签系统,每种类型各有优缺,下面展示了几种常见的图案。
2.使用场景
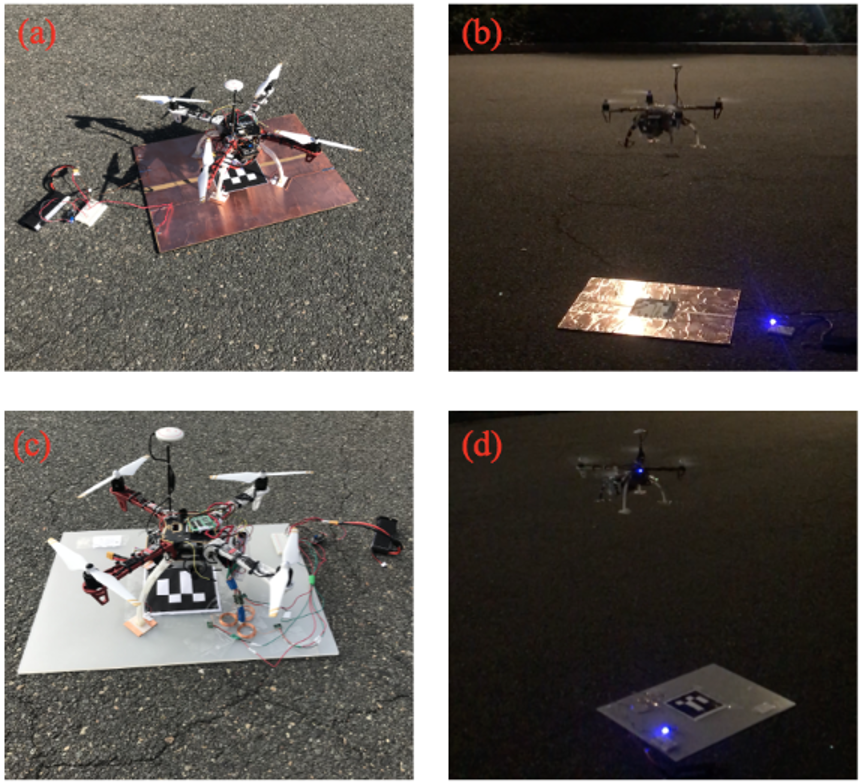
AR Tag 是一种低成本的位姿识别方式,因为它只需要使用相机和打印的标记(AR Tag)来进行实时跟踪,而不需要使用昂贵的传感器和硬件设备。另外,其算法实现也比其他传感器技术简单得多,所以可以快速而准确地识别位姿。基于其在应用上的便捷,这使得 AR Tag 成为许多实际场景的理想选择,比如:机器人导航、物体跟踪、增强现实和其他计算机视觉任务。
3.安装与生成
4.在ros中使用
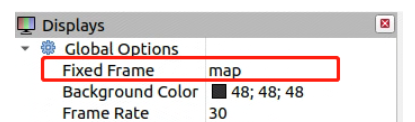
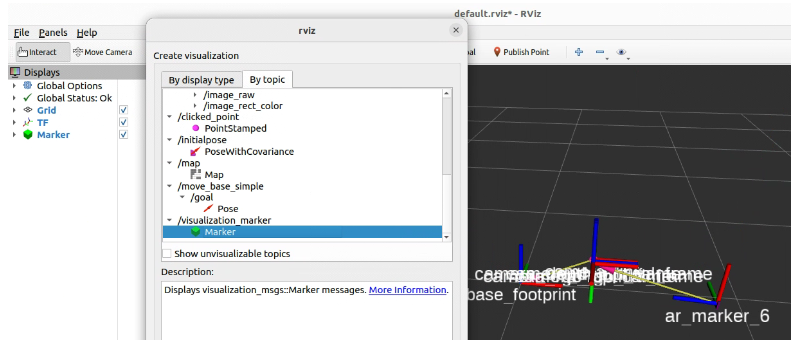
5.rviz展示效果
声明:本站所有文章,如无特殊说明或标注,均为本站原创发布。任何个人或组织,在未征得本站同意时,禁止复制、盗用、采集、发布本站内容到任何网站、书籍等各类媒体平台。如若本站内容侵犯了原著者的合法权益,可联系我们进行处理。