定义
Sampson误差是复杂性介于代数误差和几何误差之间,但非常近似于几何误差的一种误差。
应用
SLAM对极几何中使用到SD来筛选内点:
1.随机采样8对匹配点
2.8点法求解基础矩阵 ;
3.奇异值约束获取基础矩阵F;
4.计算误差,并统计内点个数;
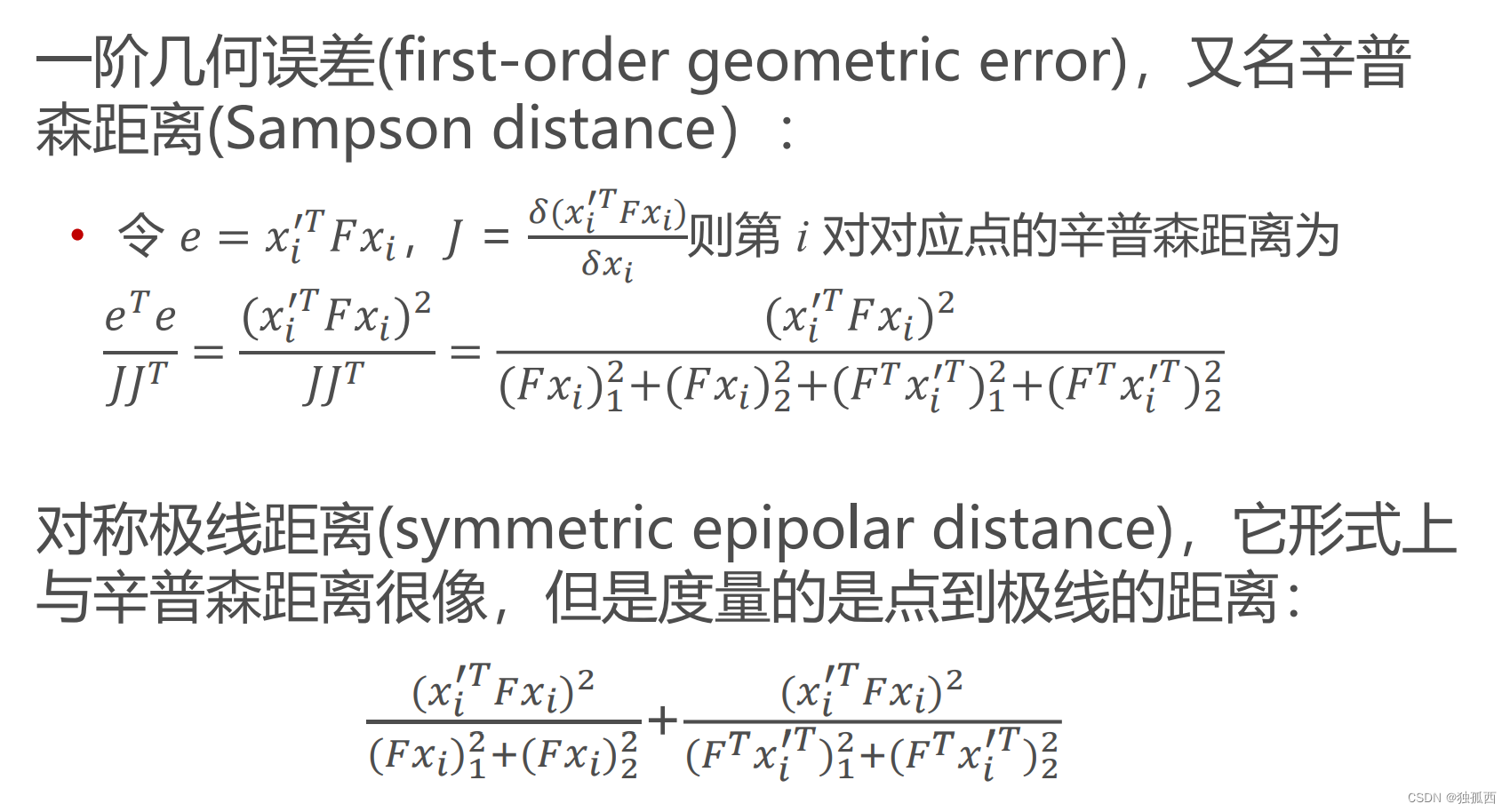
内点判断标准—一阶几何误差(first–order geometric error),又名辛普森距离(Sampson distance):令 
则该对应点 的辛普森距离为为:
的辛普森距离为为:

内点的判断标准: 
5.重复上述过程,选择内点数最多的结果;
6.对所有内点执行2,3,重新计算 .
扩展
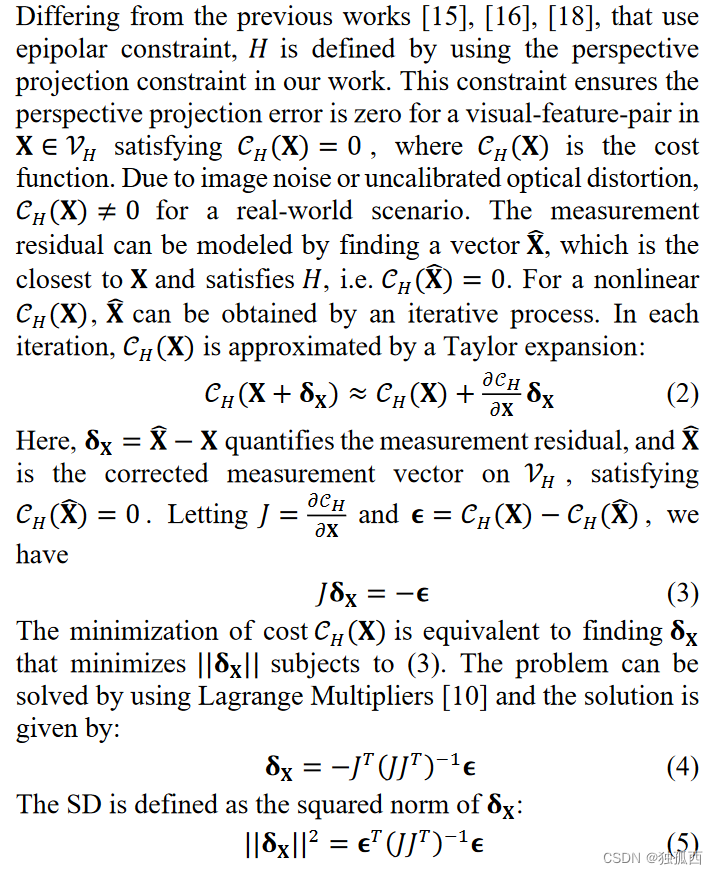
有一篇论文对SD进行了改进并用在VIO系统中的视觉残差计算上:Sampson Distance: A New Approach to Improving VisualInertial Odometry’s Accuracy。在sampson误差( SD )的基础上提出了一种新的方案来描述视觉惯性里程计( VIO )的视觉特征残差。与基于几何约束条件的视觉里程计( VO )的SD不同,所提出的SD是基于透视投影约束的。这篇论文从理论上证明了所提出的SD保留了VO文献中早期SD准则的良好性质,并且它比现有的VIO方法中流行的转移距离( TD )更准确地表示了视觉特征残差。
声明:本站所有文章,如无特殊说明或标注,均为本站原创发布。任何个人或组织,在未征得本站同意时,禁止复制、盗用、采集、发布本站内容到任何网站、书籍等各类媒体平台。如若本站内容侵犯了原著者的合法权益,可联系我们进行处理。




![[软件工具]文档页数统计工具软件pdf统计页数word统计页数ppt统计页数图文打印店快速报价工具](https://img-blog.csdnimg.cn/direct/09dfbaff3e9a47a9a551dd65fef5d482.jpeg)