STM32 CAN
前言
前面学习了CAN的一些理论知识,他在我们的STM32里面是怎么用的呢
前面讲了一些can的知识,在STM32里是什么样的呢
一、CAN外设
1.主控制寄存器CAN_MCR
DBF调试冻结:处于程序调试模式才使用。可以设置CAN处于工作模式还是禁止收发状态,禁止收发时仍可以访问接受FIFO中的数据。
TTCM时间触发模式:设置CAN的时间触发通信模式。在此模式下,CAN使用它内部定时器产生时间戳,并把它保存在CAN_RDTxR,CAN_TDTxR寄存器中。可以利用它实现标准分时同步通信功能。
ABOM自动离线管理:当节点检测到他发送错误或者接受错误超过一定值时,会自动离线管理。离线状态下,不能接收或者发送。
AWUM自动唤醒:在使用软件进入睡眠后,如果使用自动唤醒,在检测到总线活动时,会自动唤醒。
NART自动重传:当报文发送失败会自动重传直到成功为止。
RFLM锁定模式:锁定接收FIFO。锁定之后,当接收FIFO溢出时,会丢弃下一个接收的报文。若不锁定,则会覆盖掉之前的报文。
TXFP报文发送优先级的判定方法:当邮箱中有多个报文需要发送时,控制它是根据报文的ID优先级还是报文存进邮箱的顺序来发送。
2.位时序寄存器CAN_BTR
SILM:为0,正常模式;为1,静默模式
LBKM:为1,允许回环模式;为0,禁止回环模式
CAN有四种工作模式。由位时序寄存器的SILM和LBKM组合控制。
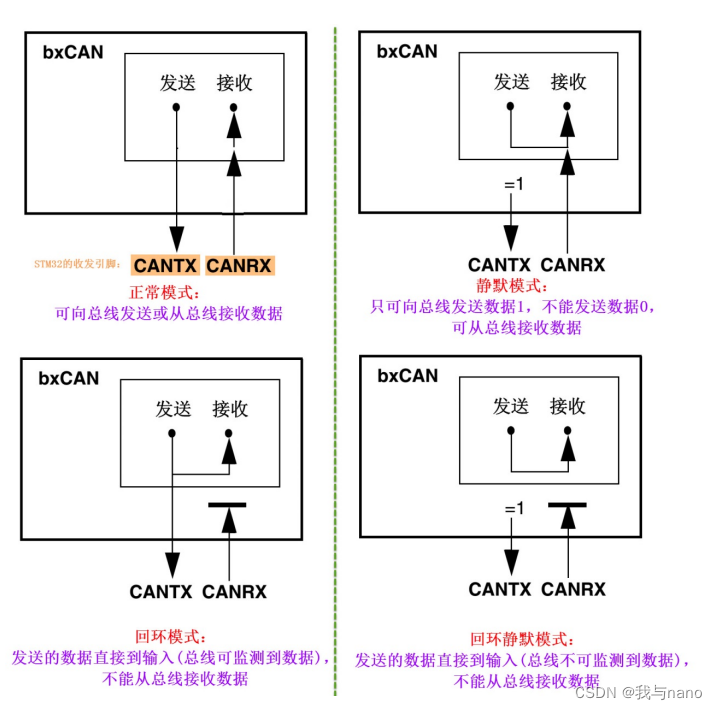
• 正常模式
正常模式下就是一个正常的 CAN 节点,可以向总线发送数据和接收数据。
• 静默模式
静默模式下,它自己的输出端的逻辑 0 数据会直接传输到它自己的输入端,逻辑 1 可以被发送到总线,所以它不能向总线发送显性位 (逻辑 0),只能发送隐性位 (逻辑 1)。输入端可以从总线接收内容。由于它只可发送的隐性位不会强制影响总线的状态,所以把它称为静默模式。这种模式一般用于监测,它可以用于分析总线上的流量,但又不会因为发送显性位而影响总线。
• 回环模式
回环模式下,它自己的输出端的所有内容都直接传输到自己的输入端,输出端的内容同时也会被传输到总线上,即也可使用总线监测它的发送内容。输入端只接收自己发送端的内容,不接收来自总线上的内容。使用回环模式可以进行自检。
• 回环静默模式
回环静默模式是以上两种模式的结合,自己的输出端的所有内容都直接传输到自己的输入端,并且不会向总线发送显性位影响总线,不能通过总线监测它的发送内容。输入端只接收自己发送端的内容,不接收来自总线上的内容。这种方式可以在“热自检”时使用,即自我检查的时候,不会干扰总线。
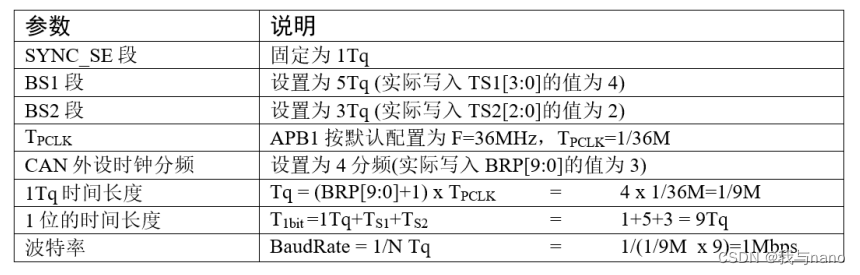
这个是怎么计算的呢,根据前面提到4分频 4/36M *(1+8+9)=500Kbps
那么1M应该怎么配置呢