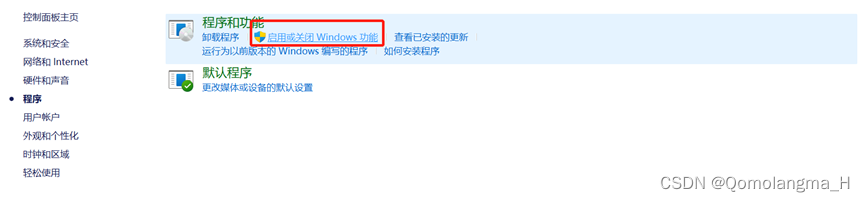
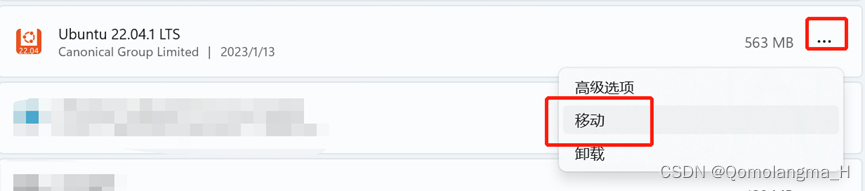
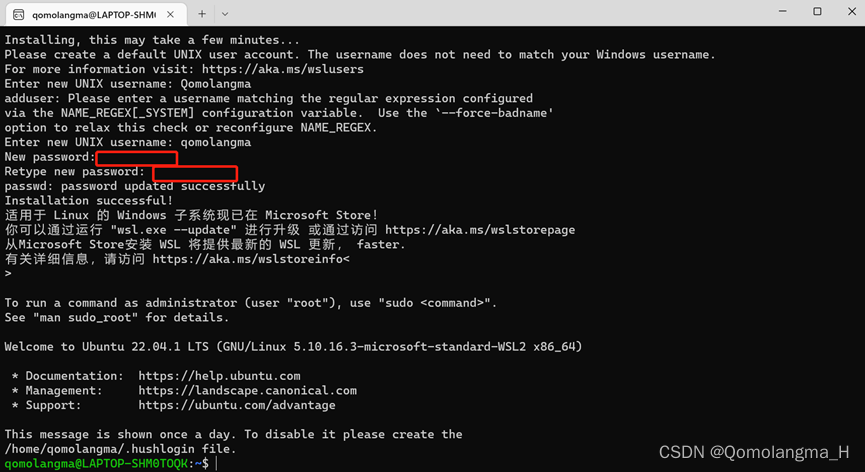
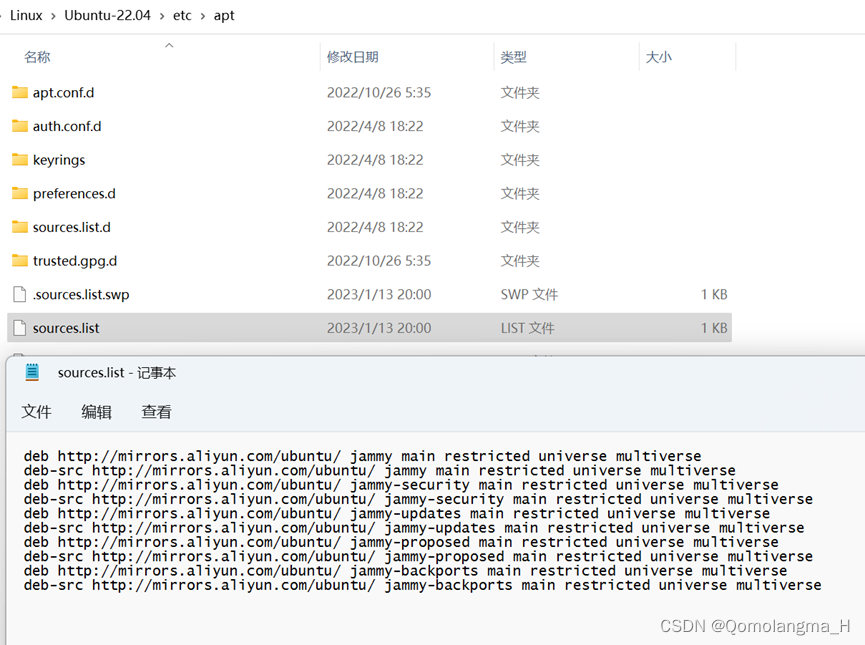
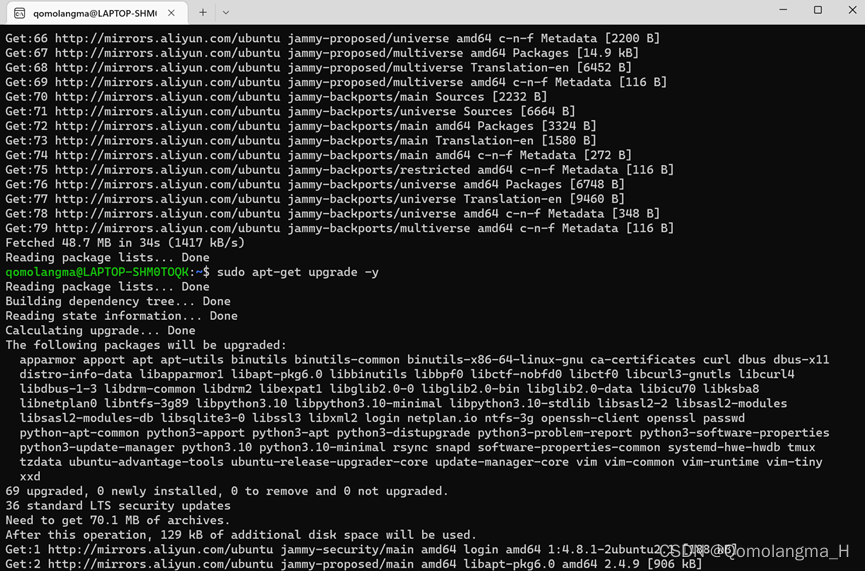
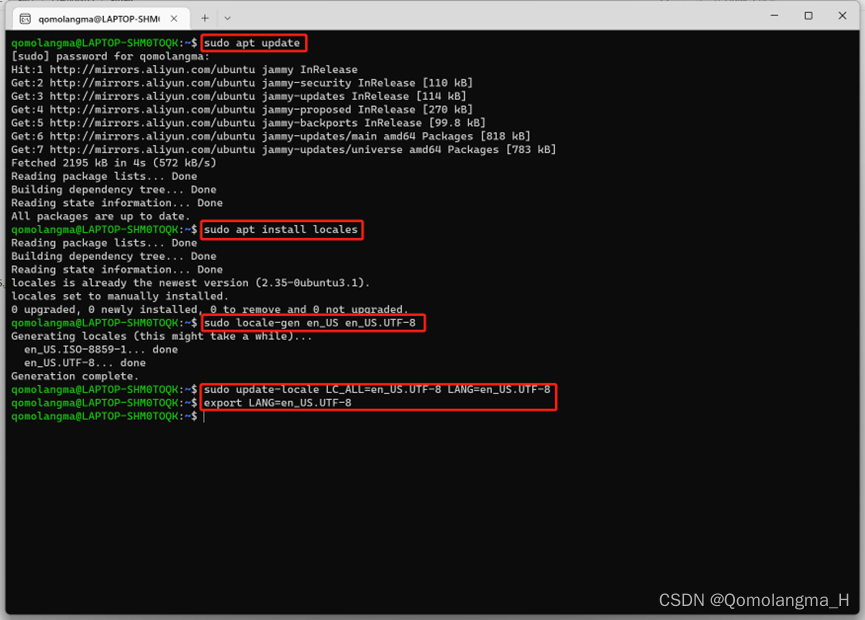
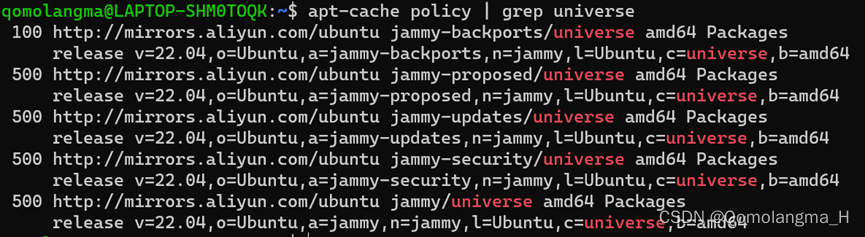
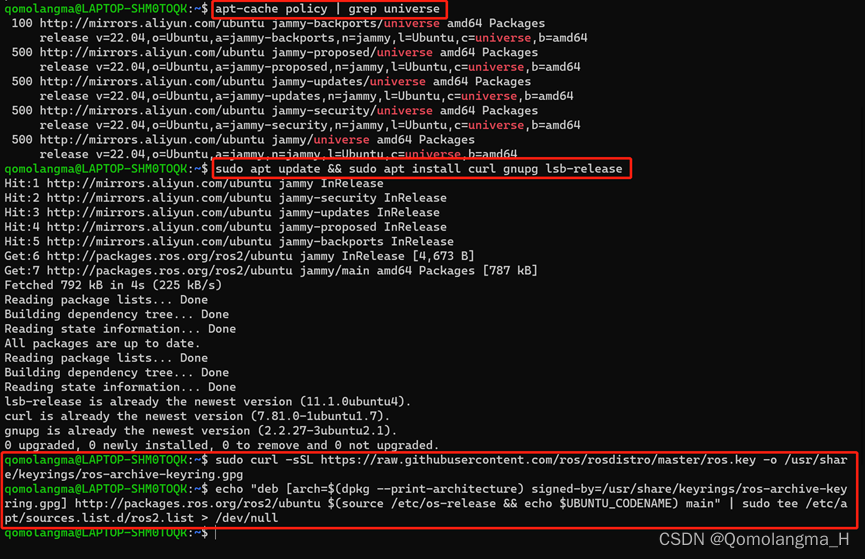
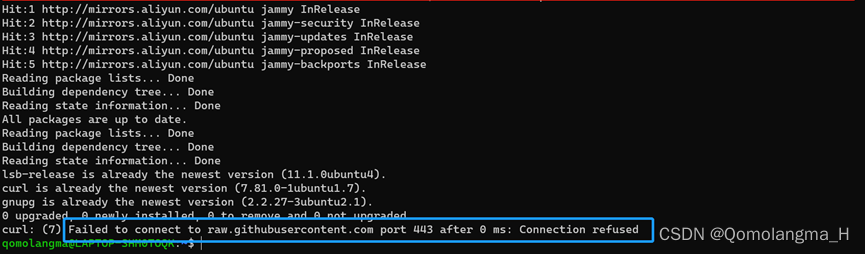
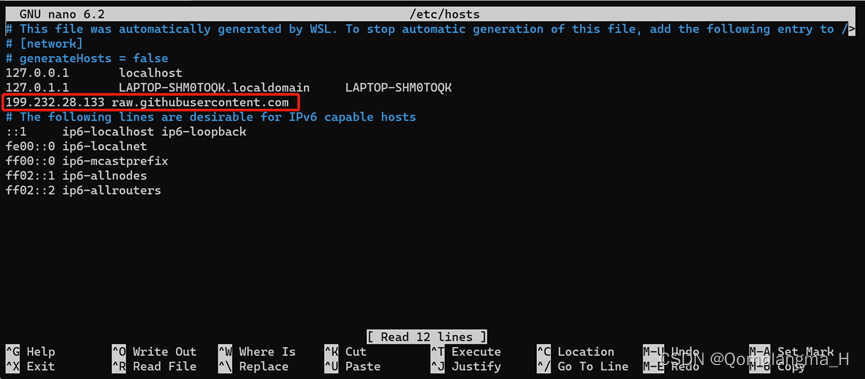
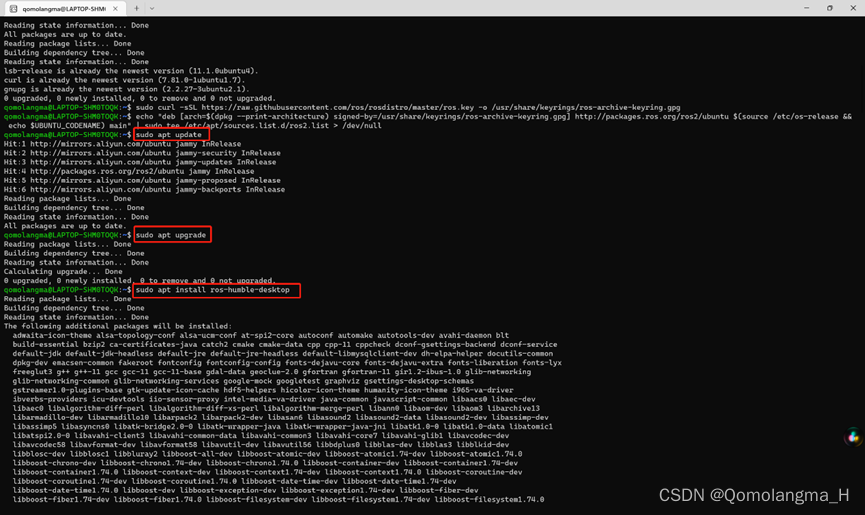
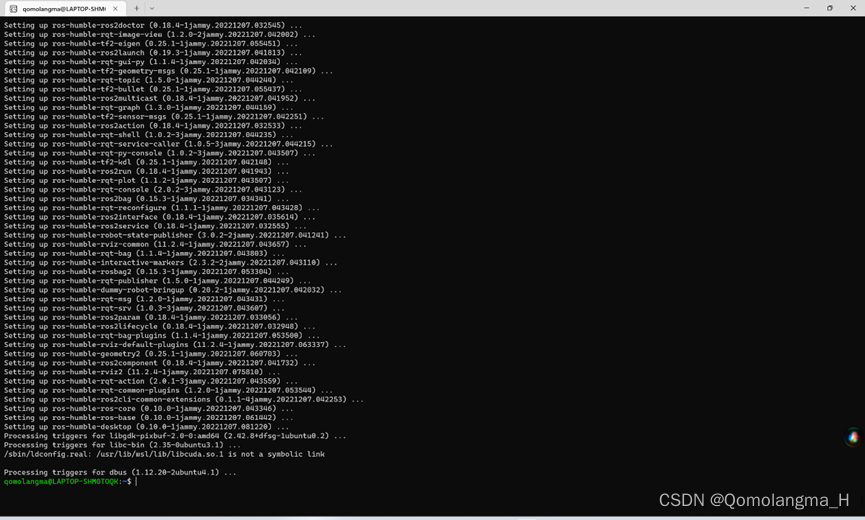
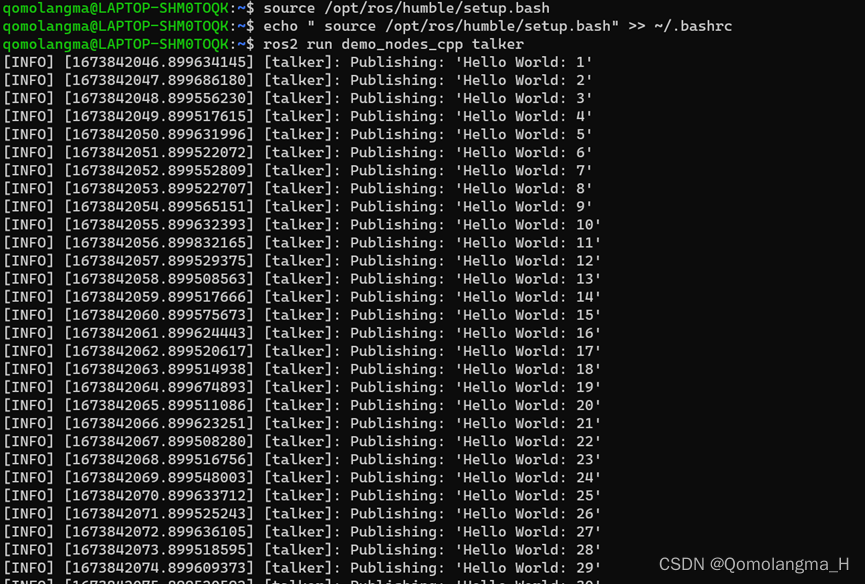
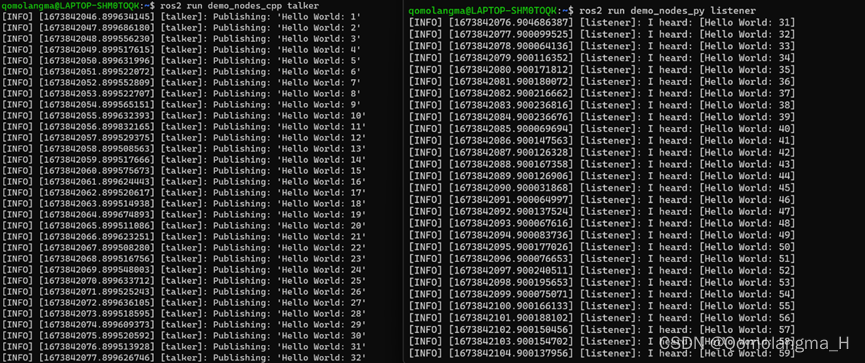
当前位置: 首页linux正文 本文介绍: Windows11安装Linux子系统(Ubuntu22.04LTS)+ROS过程记录 目录 一、准备工作 二、安装Ubuntu 22.04.1 LTS 1. 下载Ubuntu 22.04.1 LTS 2. 移动到非系统盘 三、启动Ubuntu遇到的报错及解决方案 四、换源 五、安装ROS 1. 设置编码 2. 添加源 3. 安装ROS 4. 设置环境变量 5. 测试 一、准备工作 控制面板——程序——程序和功能——启动或关闭Windows功能 开启如图所示三项,重启电脑 二、安装Ubuntu 22.04.1 LTS 1. 下载Ubuntu 22.04.1 LTS 打开Microsoft Store,搜索并下载Ubuntu 22.04.1 LTS (安装Windows Subsystem for Linux前一定要先安装Ubuntu,否则移动Ubuntu位置会报错) 2. 移动到非系统盘 ps:默认安装在C盘,可以移动安装位置,建议移动到其它盘 三、启动Ubuntu遇到的报错及解决方案 报错: WslRegisterDistribution failed with error: 0x800701bc 解决方案: 下载安装适用于 x64 计算机的最新 WSL2 Linux 内核更新包 下载链接 https://wslstorestorage.blob.core.windows.net/wslblob/wsl_update_x64.msi 安装后 报错: adduser: Please enter a username matching the regular expression configured via the NAME_REGEX[_SYSTEM] configuration variable. Use the `–force–badname‘ option to relax this check or reconfigure NAME_REGEX. 解决方案: 把大写的首字母,改成小写即可 ps:输入的密码不显示 四、换源 Ubuntu默认的软件源在国外,可能会造成下载软件卡顿,因此需要换源,这里我选择更换为阿里源。 1.双击Ubuntu22.04 LTS图标,在命令行中输入 # 备份原来的软件源 sudo cp /etc/apt/sources.list /etc/apt/sources.list.bak # 编辑软件源 sudo nano /etc/apt/sources.list 2.将原来的内容替换为阿里源 deb http://mirrors.aliyun.com/ubuntu/ jammy main restricted universe multiverse deb-src http://mirrors.aliyun.com/ubuntu/ jammy main restricted universe multiverse deb http://mirrors.aliyun.com/ubuntu/ jammy-security main restricted universe multiverse deb-src http://mirrors.aliyun.com/ubuntu/ jammy-security main restricted universe multiverse deb http://mirrors.aliyun.com/ubuntu/ jammy-updates main restricted universe multiverse deb-src http://mirrors.aliyun.com/ubuntu/ jammy-updates main restricted universe multiverse deb http://mirrors.aliyun.com/ubuntu/ jammy-proposed main restricted universe multiverse deb-src http://mirrors.aliyun.com/ubuntu/ jammy-proposed main restricted universe multiverse deb http://mirrors.aliyun.com/ubuntu/ jammy-backports main restricted universe multiverse deb-src http://mirrors.aliyun.com/ubuntu/ jammy-backports main restricted universe multiverse Ctrl + O保存, enter, Ctrl + X退出 3.更改后 4. 更新升级软件 在Ubuntu命令行中依次执行如下命令: # 更新软件源 sudo apt-get update -y # 升级所有软件 sudo apt-get upgrade -y 五、安装ROS 1. 设置编码 sudo apt update sudo apt install locales sudo locale-gen en_US en_US.UTF-8 sudo update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8 export LANG=en_US.UTF-8 2. 添加源 1.通过检查此命令的输出,确保已启用Ubuntu Universe存储库。 apt-cache policy | grep universe ①正常情况 ②若没有看到像上面这样的输出行,依次执行如下命令: sudo apt install software-properties-common sudo add-apt-repository universe 2.继续执行如下命令: sudo apt update && sudo apt install curl gnupg lsb-release sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(source /etc/os-release && echo $UBUNTU_CODENAME) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null ①正常情况 ②报错:curl: (7) Failed to connect to raw.githubusercontent.com port 443 after 0 ms: Connection refused 解决 sudo nano /etc/hosts 加上一行 199.232.28.133 raw.githubusercontent.com Ctrl + O保存, enter, Ctrl + X退出 3. 安装ROS sudo apt update sudo apt upgrade 安装桌面版 sudo apt install ros-humble-desktop 安装时间较长,慢慢等待 4. 设置环境变量 source /opt/ros/humble/setup.bash echo " source /opt/ros/humble/setup.bash" >> ~/.bashrc 5. 测试 ①通过以下命令启动一个数据的发布者节点: ros2 run demo_nodes_cpp talker ②启动另一个终端,通过以下命令启动一个数据的订阅者节点 ros2 run demo_nodes_py listener 原文地址:https://blog.csdn.net/m0_63834988/article/details/128672234 本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若转载,请注明出处:http://www.7code.cn/show_45132.html 如若内容造成侵权/违法违规/事实不符,请联系代码007邮箱:suwngjj01@126.com进行投诉反馈,一经查实,立即删除! 主题授权提示:请在后台主题设置-主题授权-激活主题的正版授权,授权购买:RiTheme官网显示所有内容声明:本站所有文章,如无特殊说明或标注,均为本站原创发布。任何个人或组织,在未征得本站同意时,禁止复制、盗用、采集、发布本站内容到任何网站、书籍等各类媒体平台。如若本站内容侵犯了原著者的合法权益,可联系我们进行处理。ltsubuntu 代码007普通 打赏 收藏 海报 链接