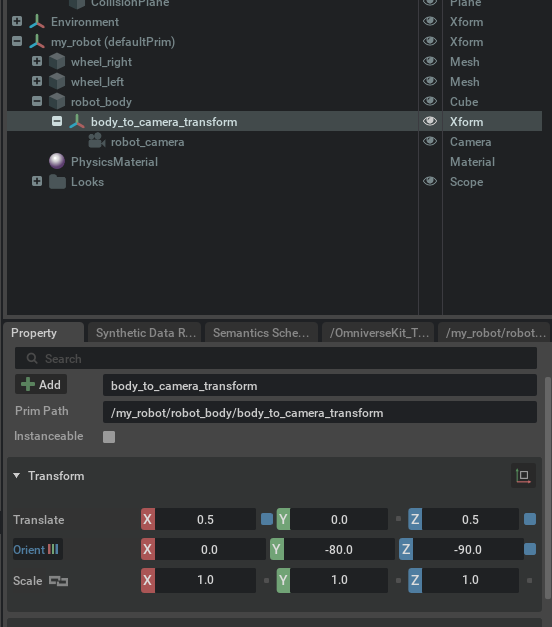
本文介绍: 有时候不小心移动了相机的视野,这个时候的相机Transform就会变化,调回去比较麻烦,如果在相机和父关节间加上一个固定的Transform关系,则每次不小心弄乱了相机的视野时,都可以通过将相机自身Transform全部置0来恢复原有状态。举例来说,考虑一个机械手臂的树结构:根部位于地平面的底部,旋转关节将不同的连杆连接到机械手,整个树结构只有一个分支,通过棱柱关节将两个夹具部分连接到手臂,实现了线性接头。将物体组织成关节树可以实现更高的模拟保真度,减少关节误差,并能够处理关节体之间更大的质量差异。
Isaac Sim 机器人简单组装及传感器了解
版权信息
学习目标
难度级别
预计耗时
25 mins
学习前提
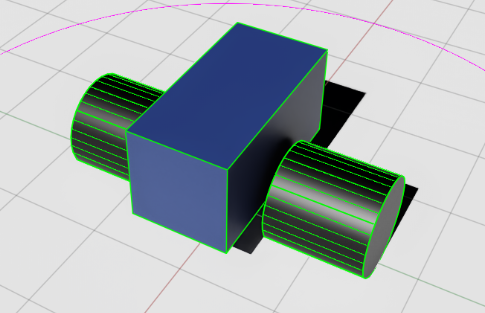
图中的机器人可以视作由三个杆件(links)和两个转动关节(revolute joints)组成的。
创建关节joint
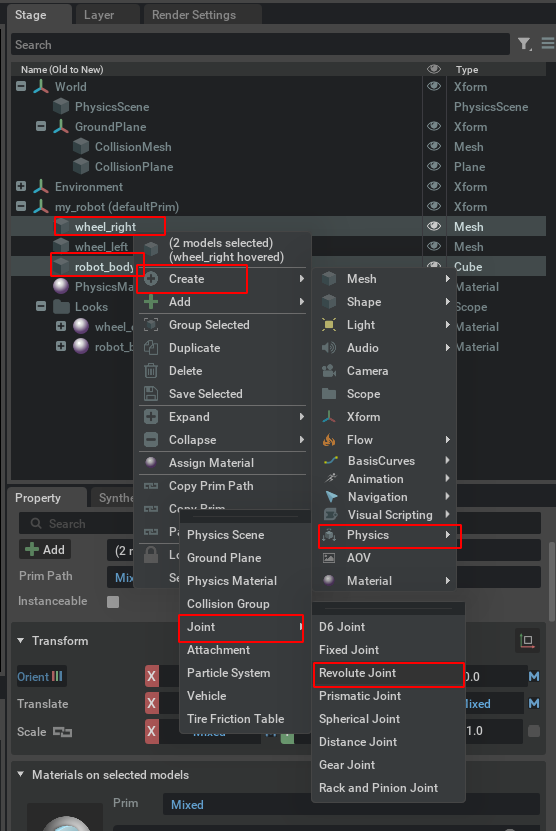
在Stage中,按下Ctrl,先选中父杆件Parent Link(此处为robot_body)再选中子杆件Child Link(此处为wheel_right),随后选中Create->Physics->Joint->Revolute Joint,创建一个Joint,并重命名为wheel_right_joint
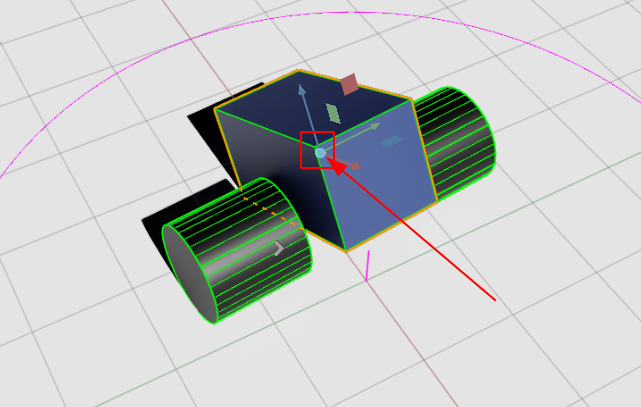
检查wheel_right_joint这个prim属性中的父子关系和转动轴系是否正确,如果不正确就需要进一步调整。

点击左侧工具栏中的Play检查,会发现右轮已经和身体绑定,而尚未设置joint的左轮正常掉落了。

随后以相同的方式设置身体到左轮的joint,重新点击左侧工具栏中的Play检查,并拖动机器人身体Prim,检查轮子的转动情况是否正常。
创建关节驱动joint drive
添加了joint只能代表不同杆件间有了机械连接,但是还不能够控制和驱动,因此需要进一步添加关节驱动的API。
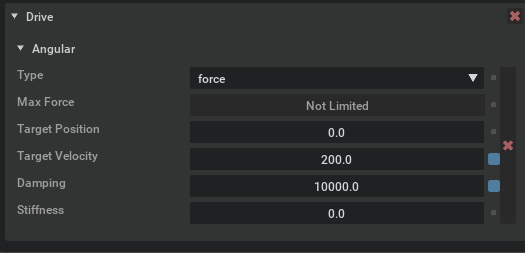
按下Ctrl选中Stage里的两个joint并依次点击Add->Physics->Angular Drive

为两个关节设置一定的目标速度(Target Velocity)和阻尼(Damping),此处分别为200和10000,随后按下Play查看效果,应该发现小车开始以指定的速度运动
创建关节树Articulation(可选的)


添加传感器
确定传感器轴系
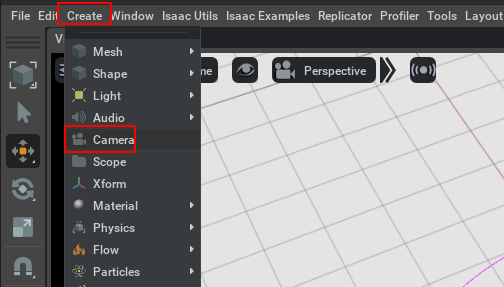
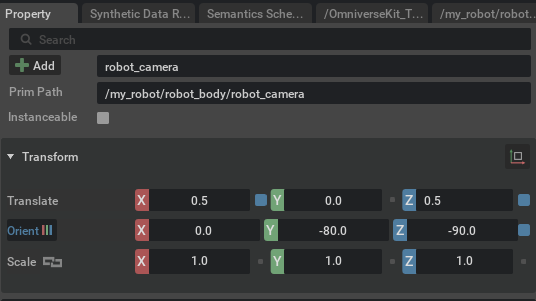
添加相机

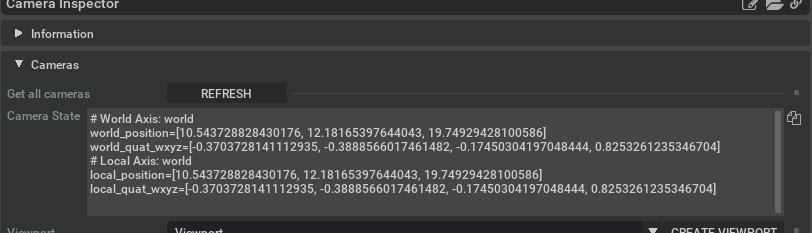
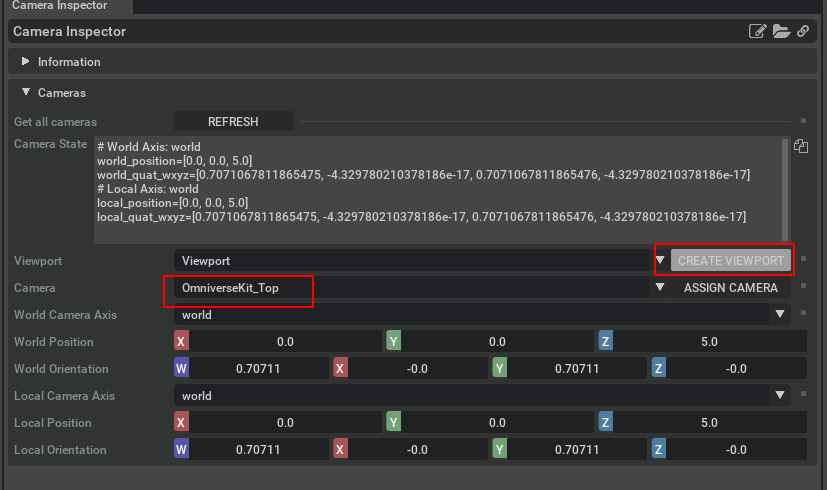
相机检查器


固定相机关系
声明:本站所有文章,如无特殊说明或标注,均为本站原创发布。任何个人或组织,在未征得本站同意时,禁止复制、盗用、采集、发布本站内容到任何网站、书籍等各类媒体平台。如若本站内容侵犯了原著者的合法权益,可联系我们进行处理。




