论文题目:Isometric 3D Adversarial Examples in the Physical World
会议:NIPS 2022
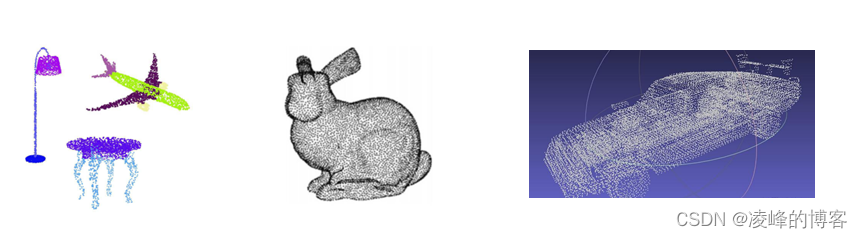
点云:
点云——表达目标空间分布和目标表面特性的海量点集合,点包含xyz坐标信息 能够包含颜色等其他信息
使用顶点、边和面的数据表征的三维图形的表面,顶点包含坐标信息,面片常用顶点编号来表示,同时可以附加纹理颜色等信息
点云和mesh是常用的3D表示数据、获取容易(使用RGBD相机、结构光相机、激光雷达都可以获取到)、应用广泛(点云常用与自动驾驶、医疗点云数据分割、mesh可以用于3D打印再比如游戏中角色的建模),值得一提的是点云与mesh可以方便地互相转化(利用meshlab、pcl等工具可以从点云数据导出到mesh上,反之也可以在mesh上采样得到点云)
为了适应越来越广泛的点云应用,近年来涌现出了许多点云模型用于完成各类任务如分类、部件分割、语义分割等,常见的如这种基于MLP+POOling层的POINTNET结构、还有基于图卷积的DGCNN、还有一些基于transformer的、基于卷积的…….
对抗样本
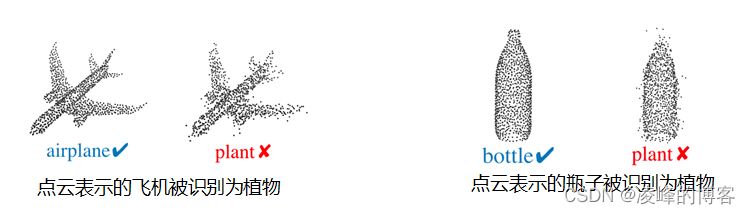
点云攻击方法:
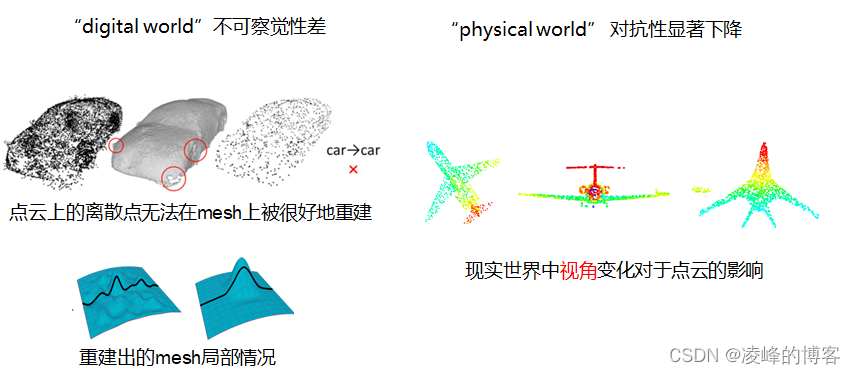
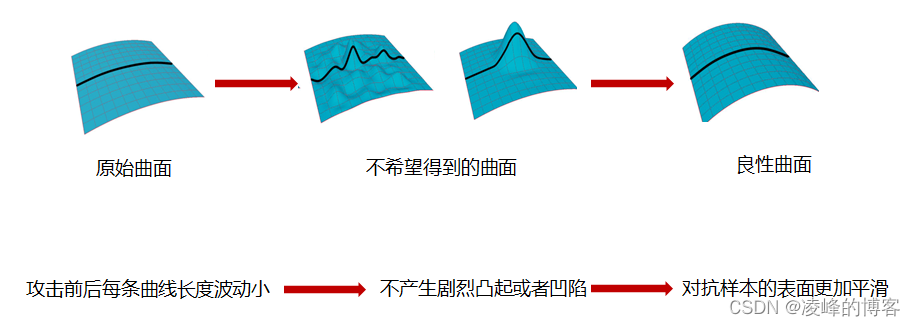
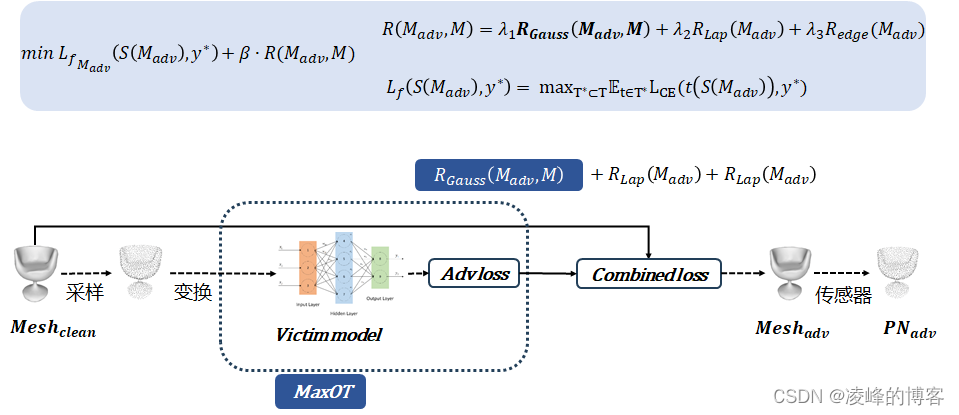
提出方法
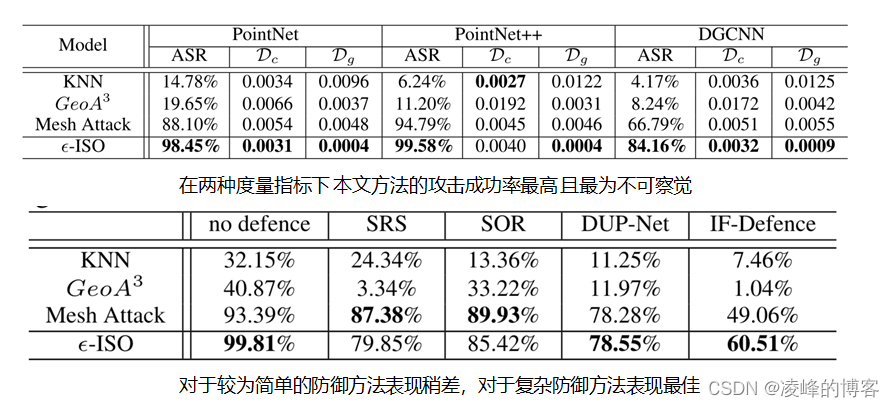
实验结果
声明:本站所有文章,如无特殊说明或标注,均为本站原创发布。任何个人或组织,在未征得本站同意时,禁止复制、盗用、采集、发布本站内容到任何网站、书籍等各类媒体平台。如若本站内容侵犯了原著者的合法权益,可联系我们进行处理。