本文介绍: 自2017年发布以来,Apollo开放平台已迭代了12个版本,今天我们带来了全新的Beta版本在Beta中,我们从在工程框架、算法和工具三个方向实现了全面升级,使得Apollo在功能上更丰富更强大,整体操作上也更灵活更易用,极大提升开发效率的同时,可帮助更多开发者快速搭建属于自己的自动驾驶系统。Apollo计划是百度在自动驾驶领域推出的开放平台,旨在为汽车行业和自动驾驶领域的合作伙伴提供一套完整、安全、开放的软件系统,帮助他们结合车辆和硬件系统,快速搭建一套属于自己的完整的自动驾驶系统。
在繁忙的都市生活中,我们时常对未来的科技发展充满了好奇和期待。而近日,我有幸参加了一场引领科技潮流的线下技术沙龙,主题便是探索自动驾驶的魅力——一个让我们身临其境感受创新、了解技术巨擘的机会。
在12月2日我有幸参加了Apollo新版本Beta自动驾驶技术沙龙,此次推出的全新Beta版本更是引发了无数开发者的兴奋。我惊讶于Apollo在工程框架、感知算法、规划控制等方面的巨大升级和优化。这不仅是对自动驾驶技术的巅峰呈现,更是对未来道路上的创新探索。让我们跟随本次技术沙龙一起来感受一下Apollo的魅力吧!

时间:12月2日(周六) 14:00-18:00
一.Apollo

1.1Apollo车型进化史

1.2 Apollo新版本Beta整体介绍


二.Apollo新版本Beta工具技术分享
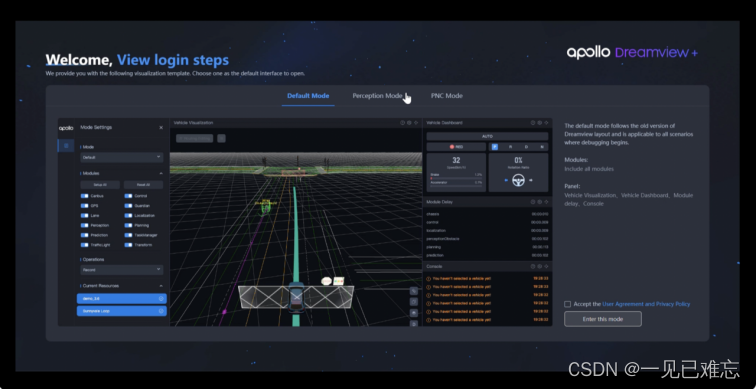
2.1 Dreamview+ 新特性




2.2 自由交流/茶歇


2.3 沙龙参会心得

声明:本站所有文章,如无特殊说明或标注,均为本站原创发布。任何个人或组织,在未征得本站同意时,禁止复制、盗用、采集、发布本站内容到任何网站、书籍等各类媒体平台。如若本站内容侵犯了原著者的合法权益,可联系我们进行处理。