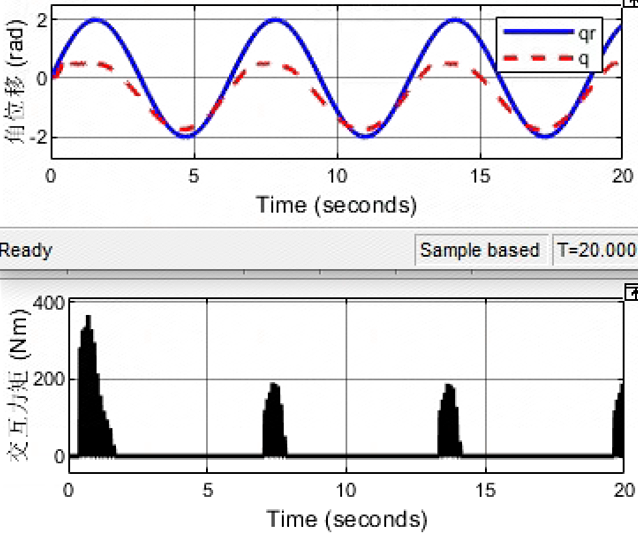
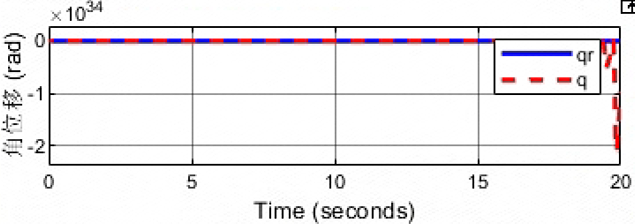
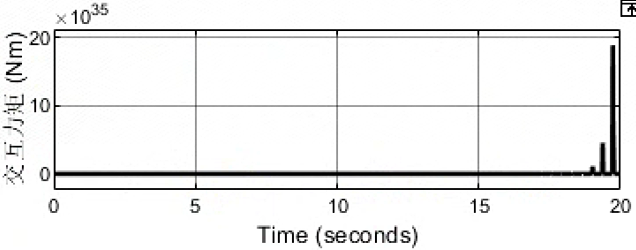
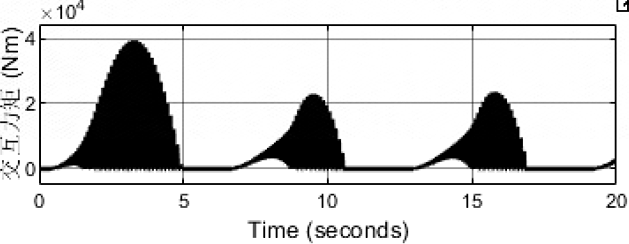
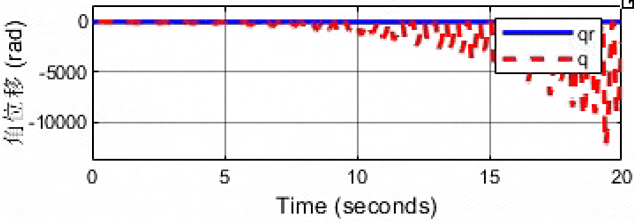
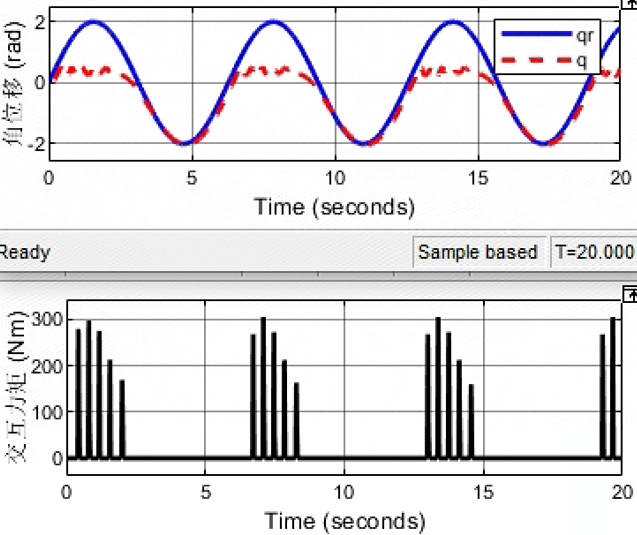
在阻抗控制下,当机器人接触刚性环境时,可能会出现振荡不稳定的情况。这可以通过调整机器人的阻抗参数来进行调节。
阻抗接触
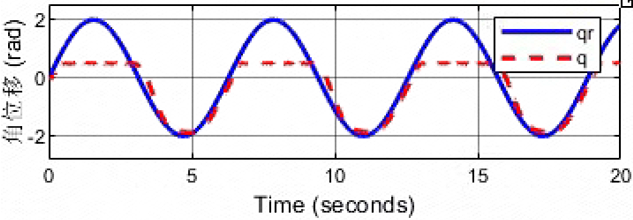
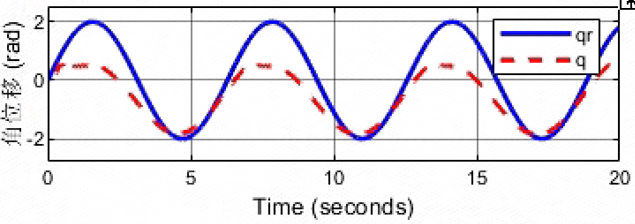
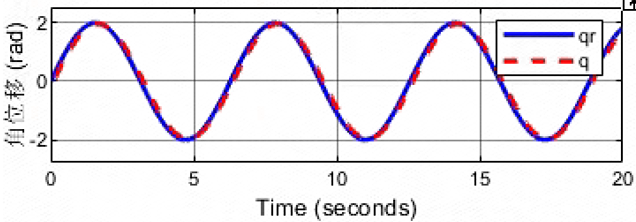
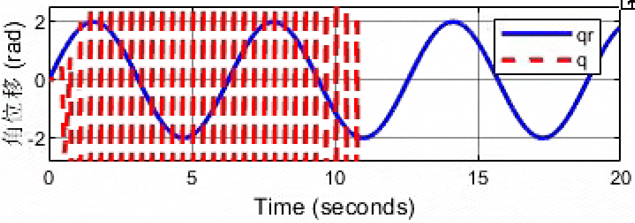
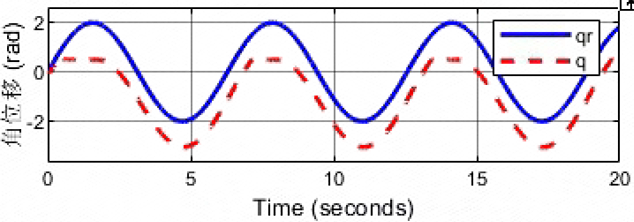
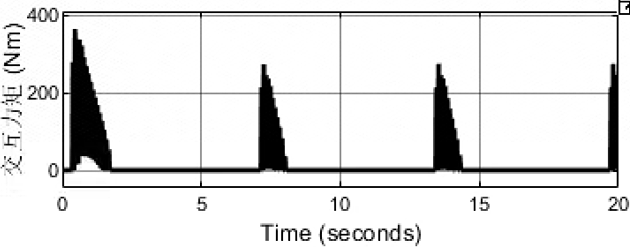
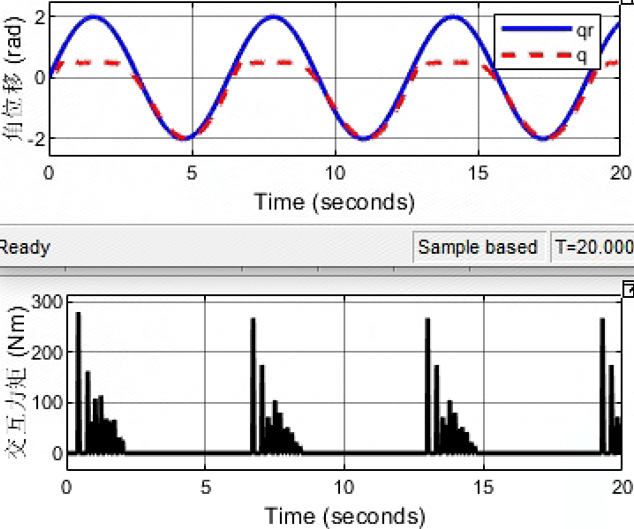
阻抗参数中的质量、阻尼和刚度都会对机器人控制系统的性能和稳定性产生重要影响。质量主要影响系统的惯性,从而影响响应速度和稳定性;阻尼则可以抑制系统的振荡,提高系统的稳定性;而刚度则表示系统抵抗变形的能力,过大的刚度可能导致系统不稳定。在设计和调整控制系统时,需要考虑这些参数的影响,并根据实际需求进行合理的选择和调整。
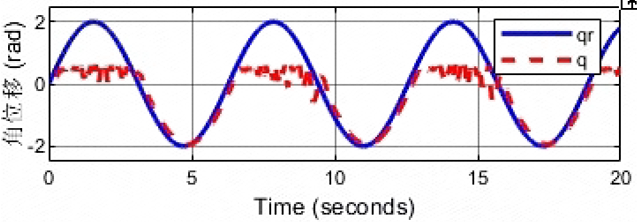
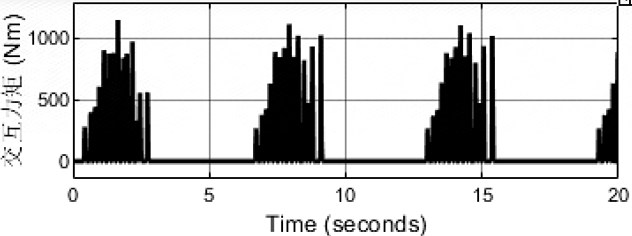
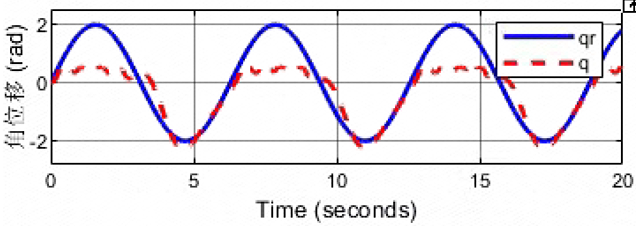
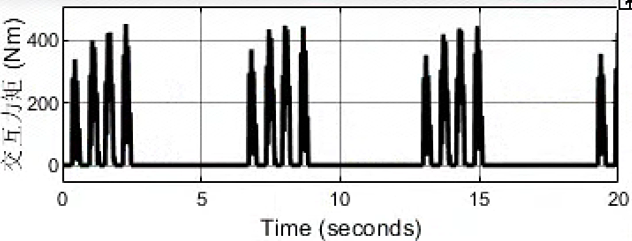
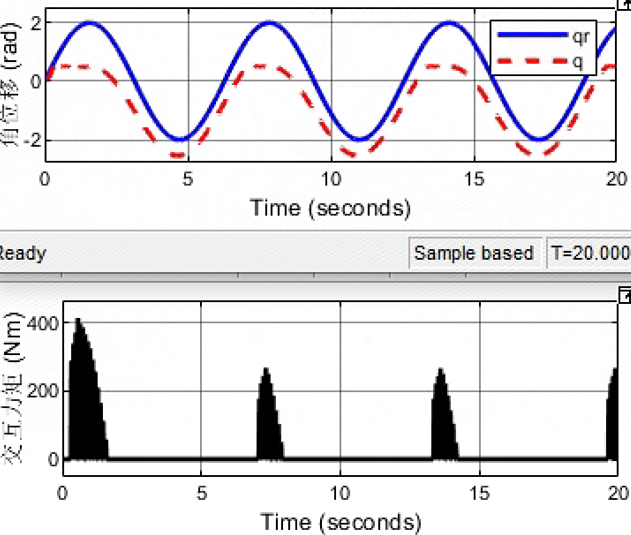
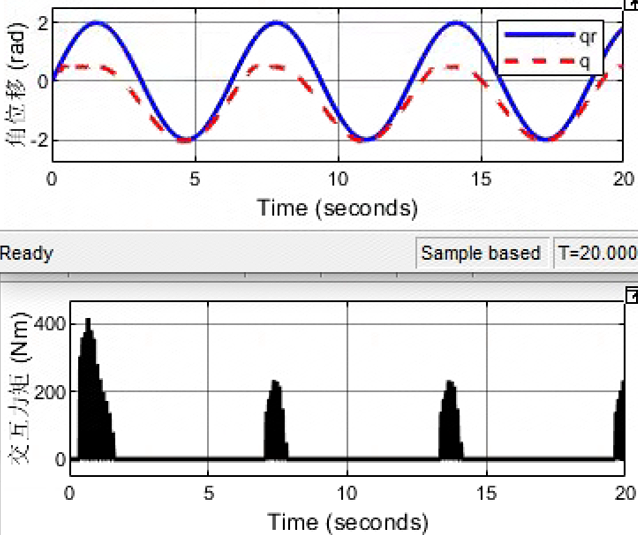
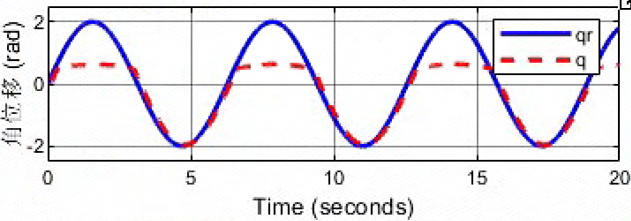
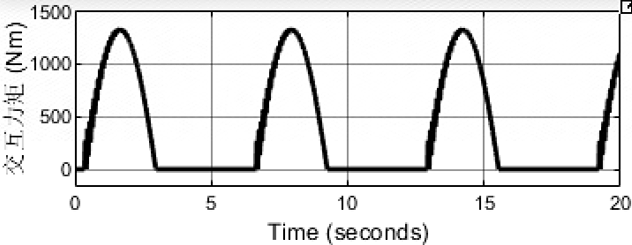
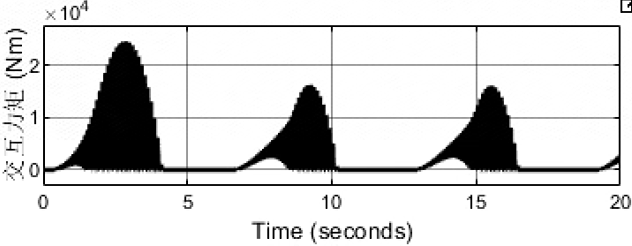
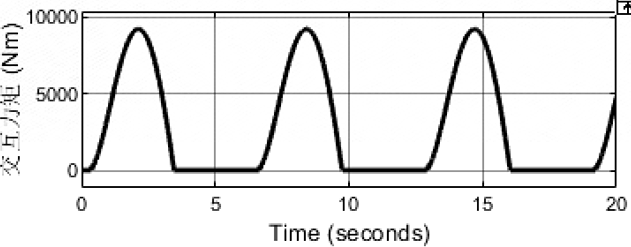
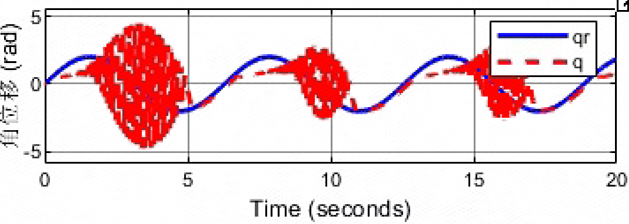
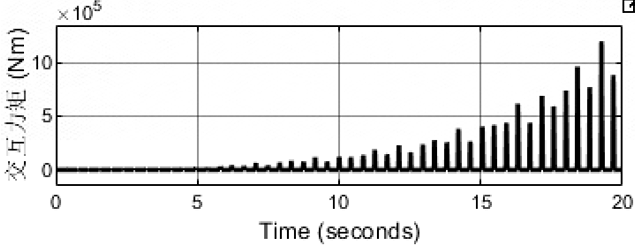
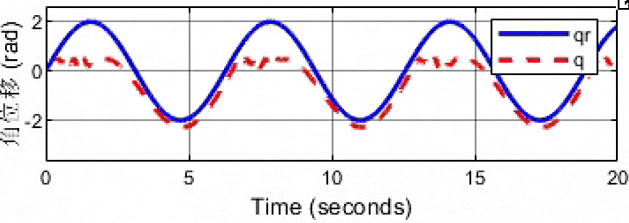
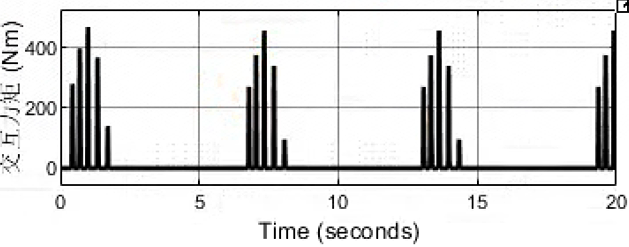
在阻抗控制模式下,机器人接触刚性环境时会引起接触振荡,主要原因可以从阻抗参数的角度进行分析。首先,阻抗控制是一种基于系统动态特性的控制方法,通过调整系统的阻抗参数,实现对机器人与环境之间交互的精确控制。在接触刚性环境时,机器人会受到来自环境的反作用力,这种反作用力可能会引起机器人的振动。
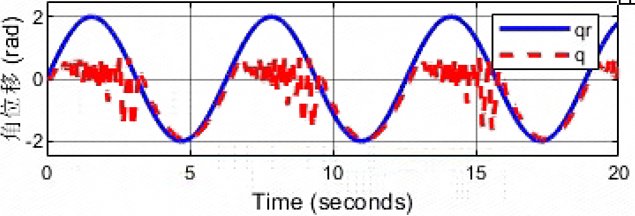
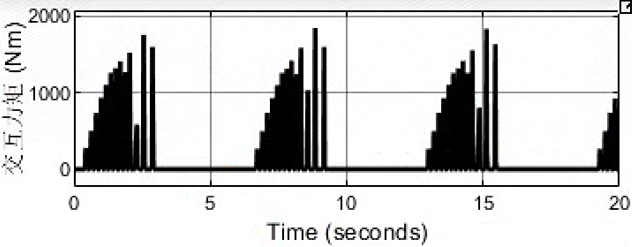
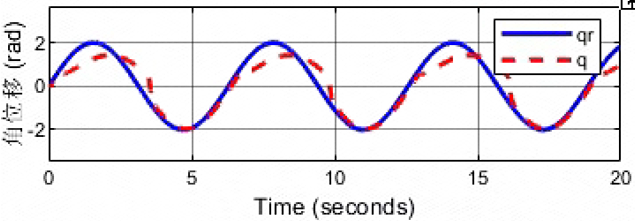
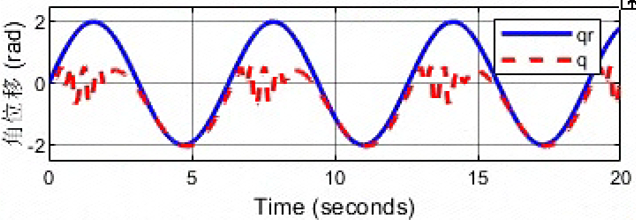
虽然这种振荡可能会对机器人的性能产生不利影响,但并不一定意味着机器人是不稳定的。在阻抗控制中,通常会使用一些稳定性判据来评估机器人的稳定性,如李雅普诺夫稳定性判据等。如果机器人在受到扰动后能够恢复稳定状态,那么这种振荡就不算是真正的不稳定性行为。


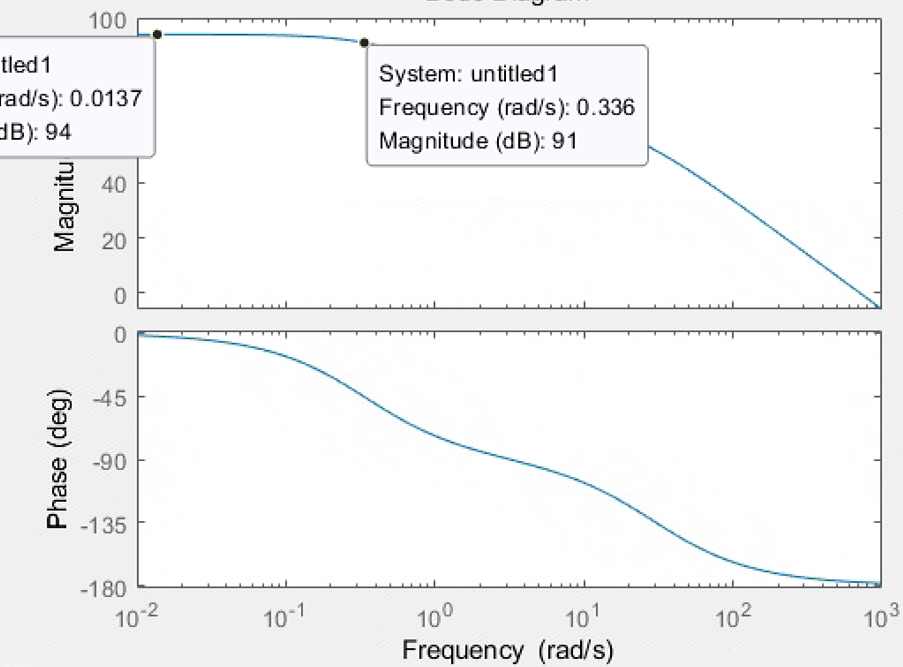
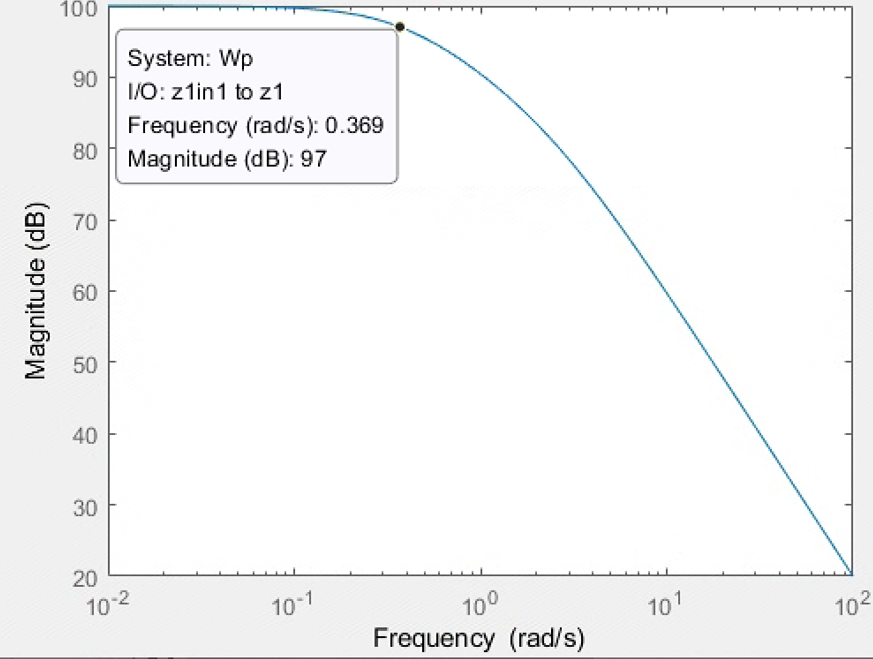
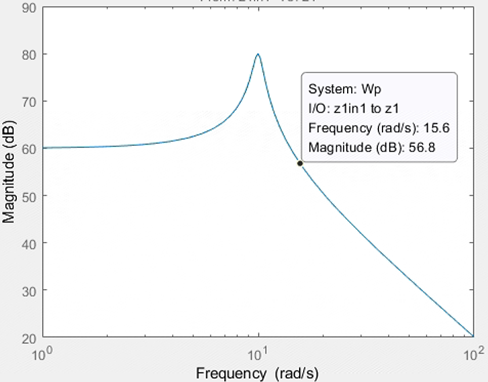
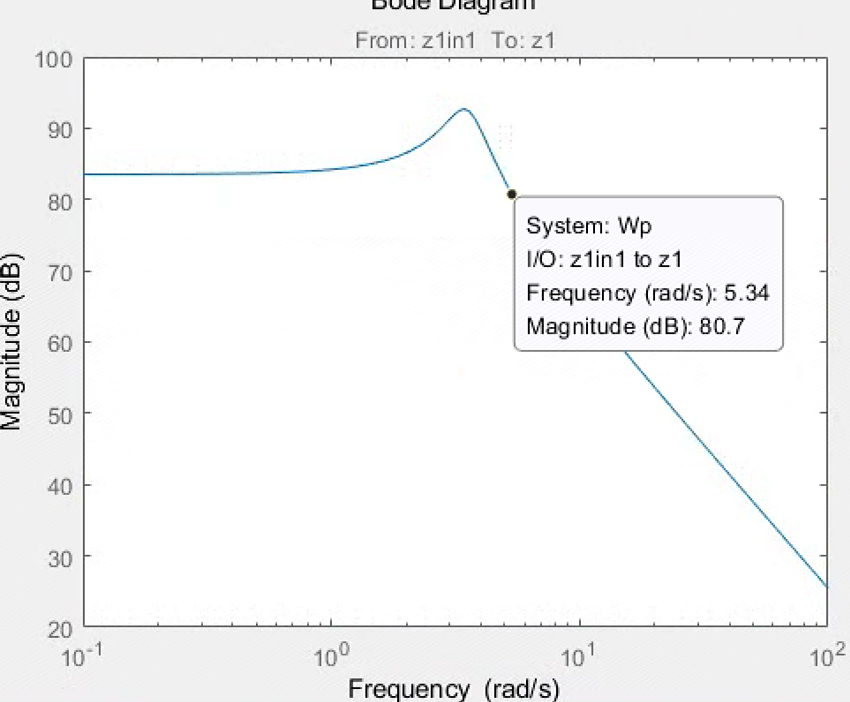
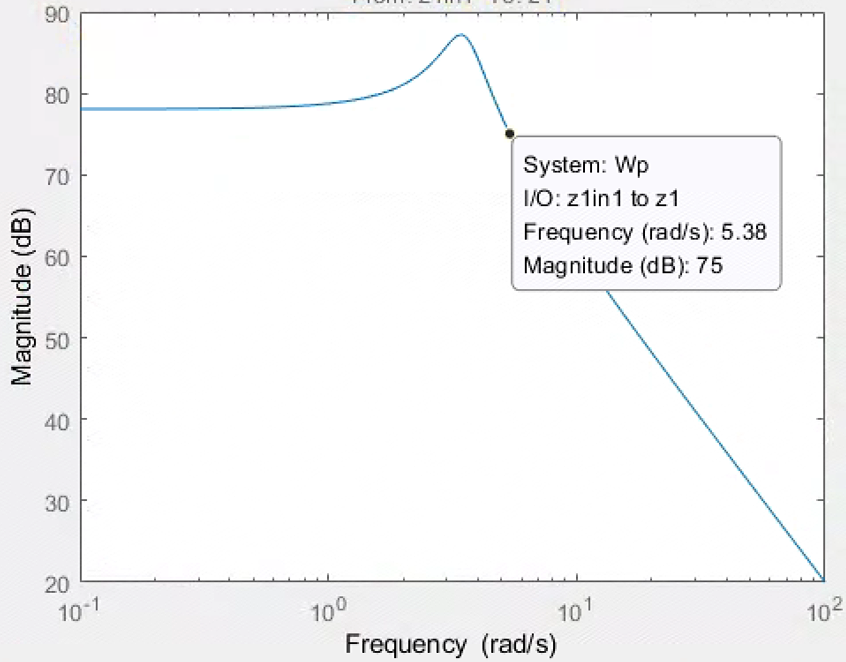
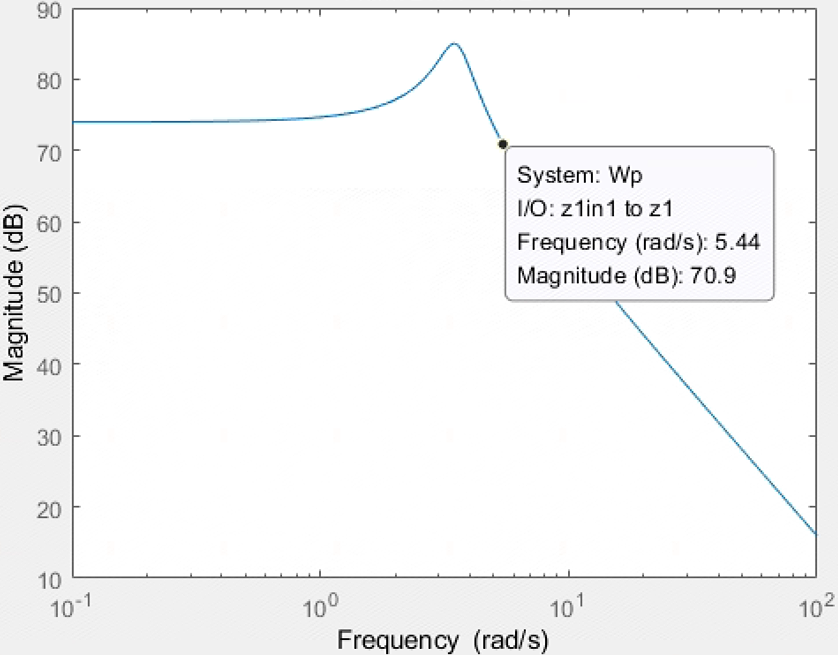
性能低通滤波调参
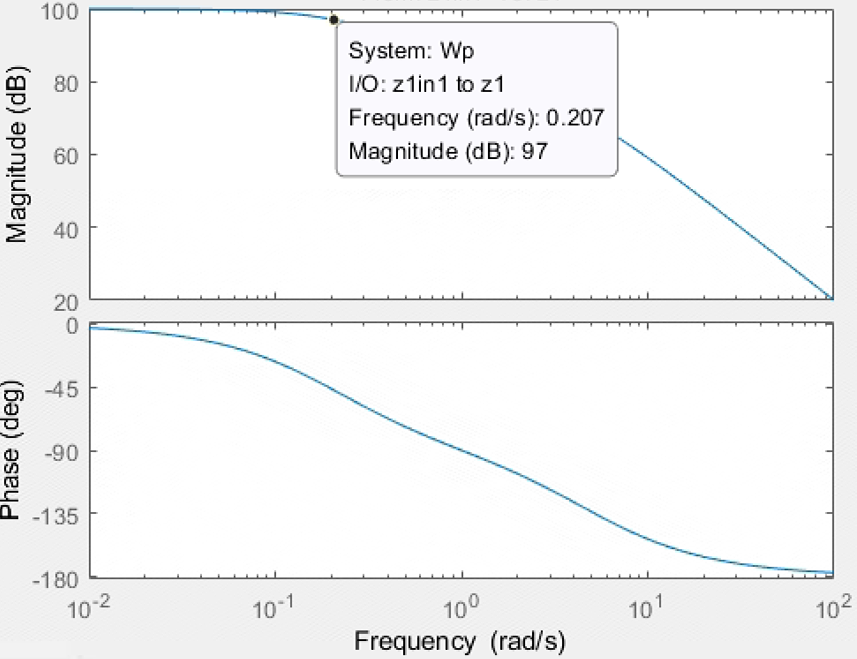
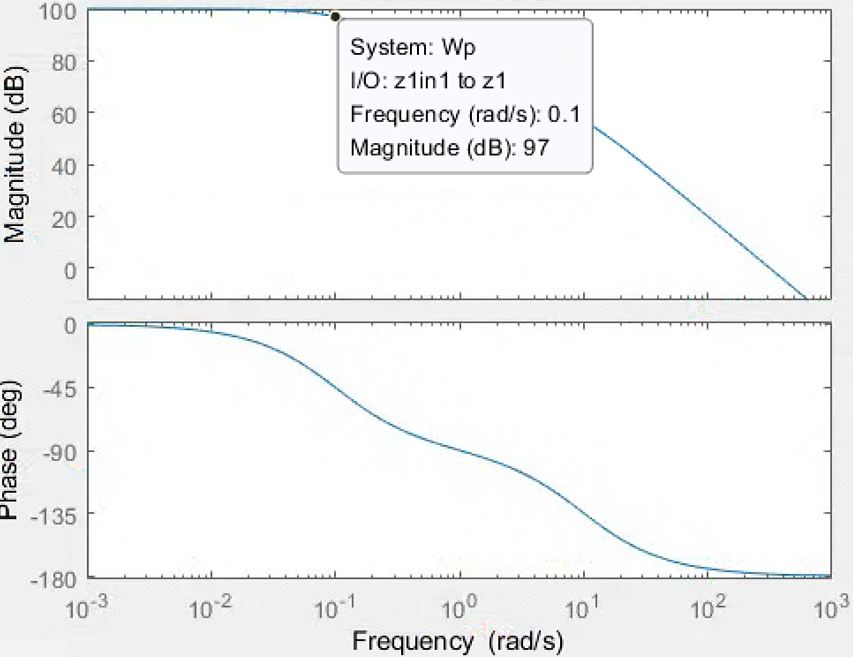
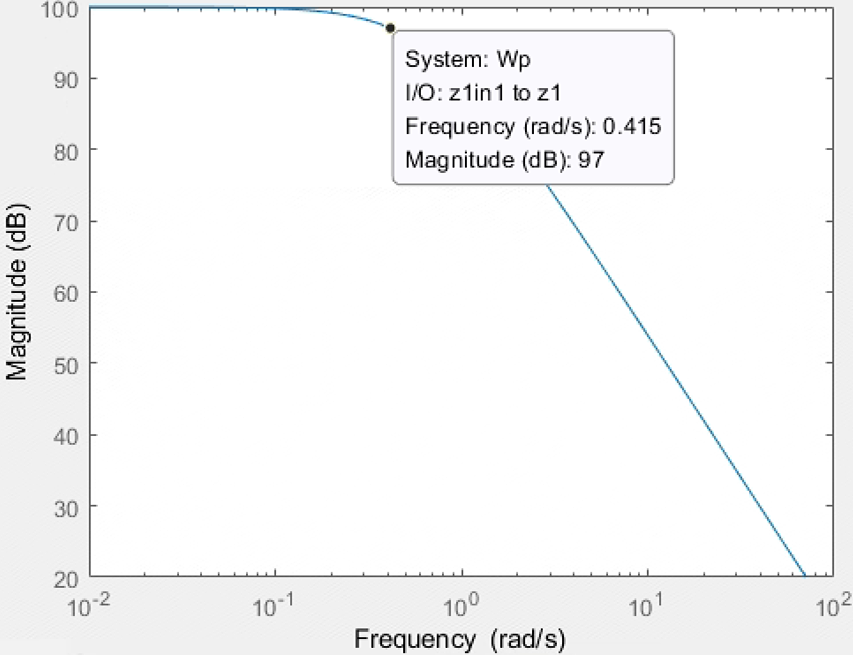

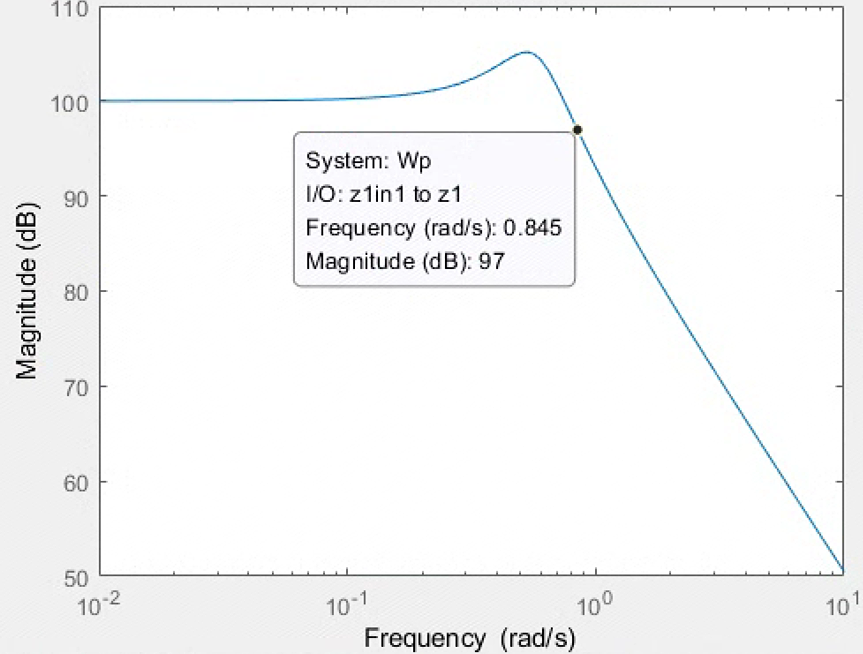
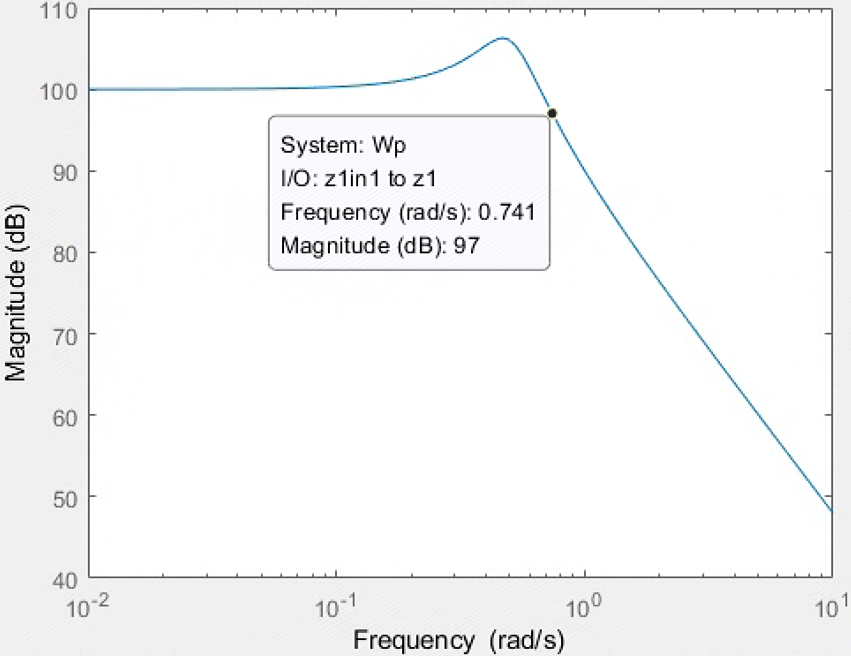
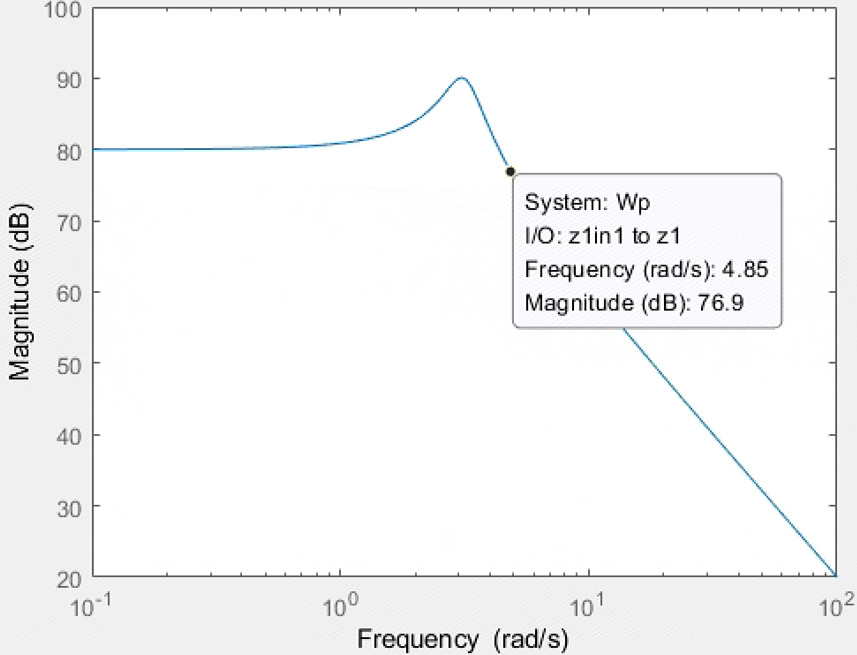
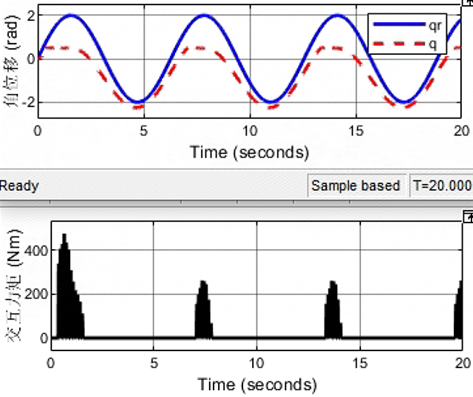
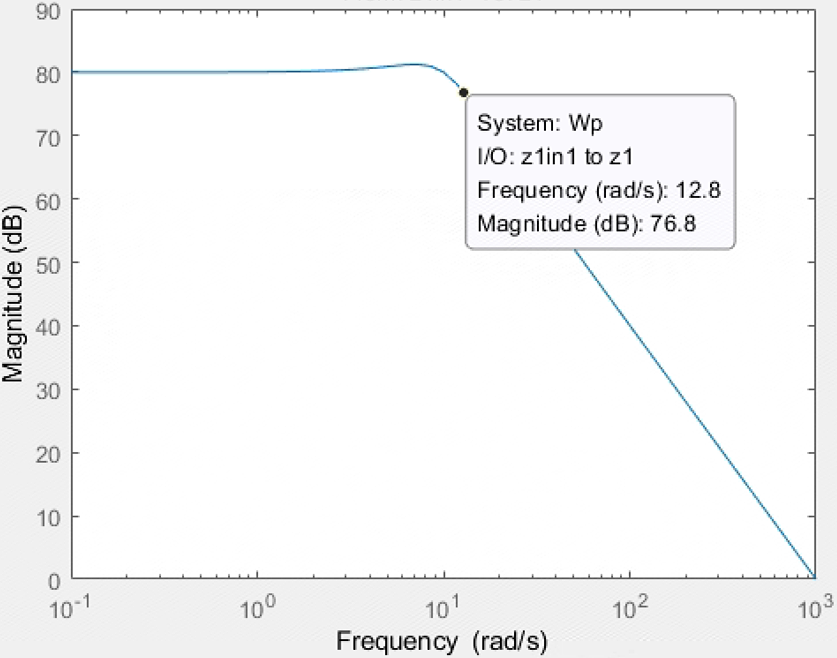
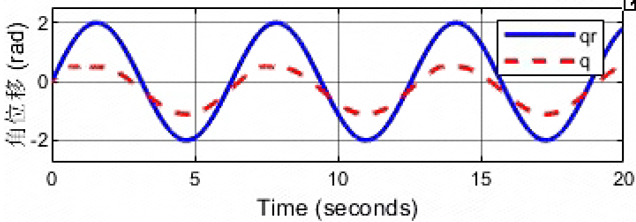


低阻抗模式下的刚性接触
纯弹簧接触
kd=10
kd=100
kd=1000
kd=10000

kd=100000
kd=1000000
粘弹性接触
kd=10,bd=1
kd=10,bd=10
kd=10,bd=15

kd=10,bd=20
kd=10,bd=100
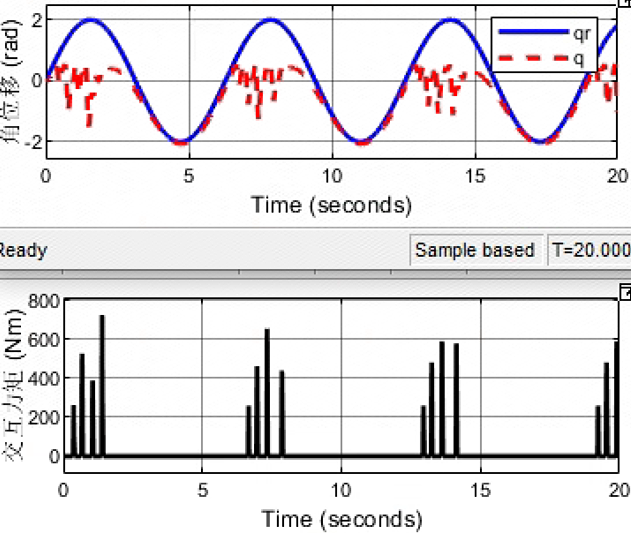
Kd = 100; Bd = 10
Kd = 100; Bd = 100
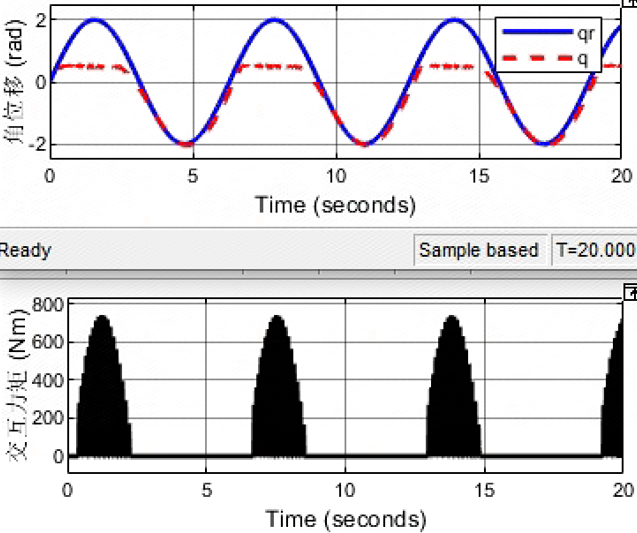
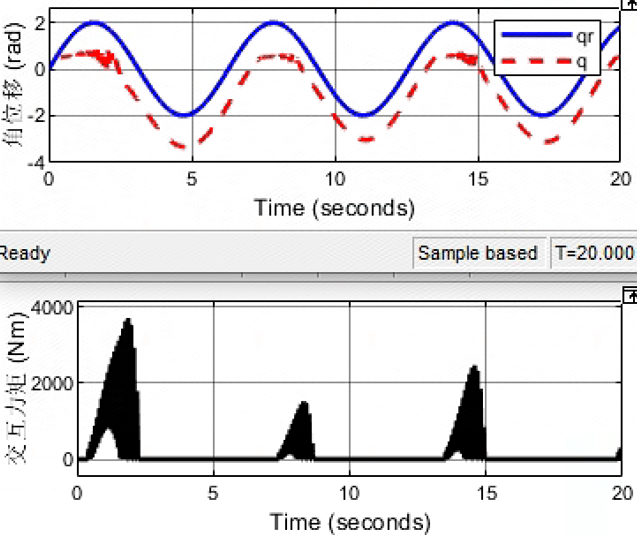
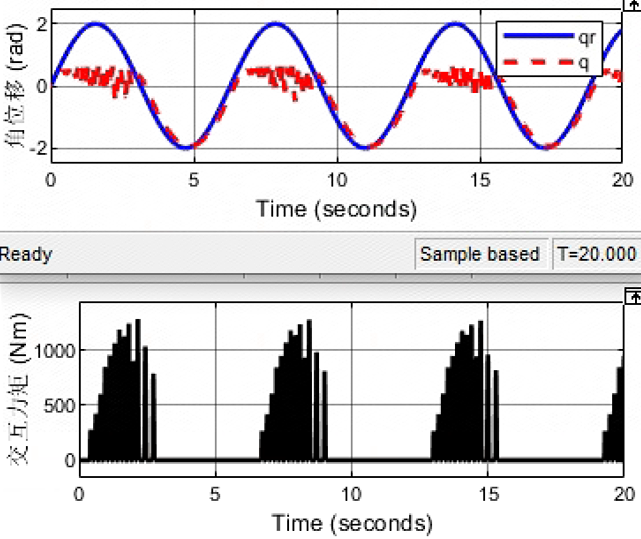
呈现质量-阻尼-弹簧动态
Kd = 10; Bd = 10 ; Md = 0.01;

Kd = 10; Bd = 10 ; Md = 1;
Kd = 10; Bd = 10 ; Md = 2;
声明:本站所有文章,如无特殊说明或标注,均为本站原创发布。任何个人或组织,在未征得本站同意时,禁止复制、盗用、采集、发布本站内容到任何网站、书籍等各类媒体平台。如若本站内容侵犯了原著者的合法权益,可联系我们进行处理。




![[软件工具]文档页数统计工具软件pdf统计页数word统计页数ppt统计页数图文打印店快速报价工具](https://img-blog.csdnimg.cn/direct/09dfbaff3e9a47a9a551dd65fef5d482.jpeg)