有幸参加Apollo开发者社区于12月2日举办的Apollo新版本(8.0)的技术沙龙会,地址在首钢园百度Apollo Park。由于去的比较早,先参观了一下这面的一些产品,还有专门的讲解,主要讲了一下百度无人驾驶的发展历程和历代产品。我对下面几个产品印象颇深:
首先是无人驾驶已经可以打车了,通过萝卜快跑小程序就可以,已经在很多城市普及了,未来如果全方面普及的话可以大大方便人们的出行效率,并且还可以减低出行成本,这次去正好碰到滑雪比赛,不能体验无人驾驶,有机会要打车试一下。

一个是未来驾舱,从外部来看,很简洁的设计,科技感十足,从内部来看,取消了方向盘那些操控,使内部空间变得很大,很舒适。以后如果有这样一款车,应该很不错。


还有一个产品是5G云代驾,第一次听说过这个,本来以为无人驾驶已经很超前了,通过云代驾,可以远程控车,一旦无人驾驶时候出现异常,可以接管驾驶权,驾驶员通过这个方向盘可以实现自己的操作,左右显示屏能看到周围画面,并且还是5G,这样延时率很低。除此之外还可以用再一些危险作业,比如说矿车那些,有这样的远程控车,可以大大减少安全隐患。


接下来让我们进入正题,参观完之后就开始今天的技术沙龙会了。
首先整体介绍了Apollo新版本的一些功能,相比于旧版本有很大提升,不仅简化了之前的一些操作流程,还变的更有条理,8.0版本推出的包管理,降低了模块之间的耦合性,可以实现高效复用。然后主要介绍了三个方面:工具、算法、工程。
工具方面:支持本地Pnc仿真调试,还有云实验平台,大大减少开发者搭建环境的周期,只需要输入一条指令开启环境,然后运行dreamview就可以。
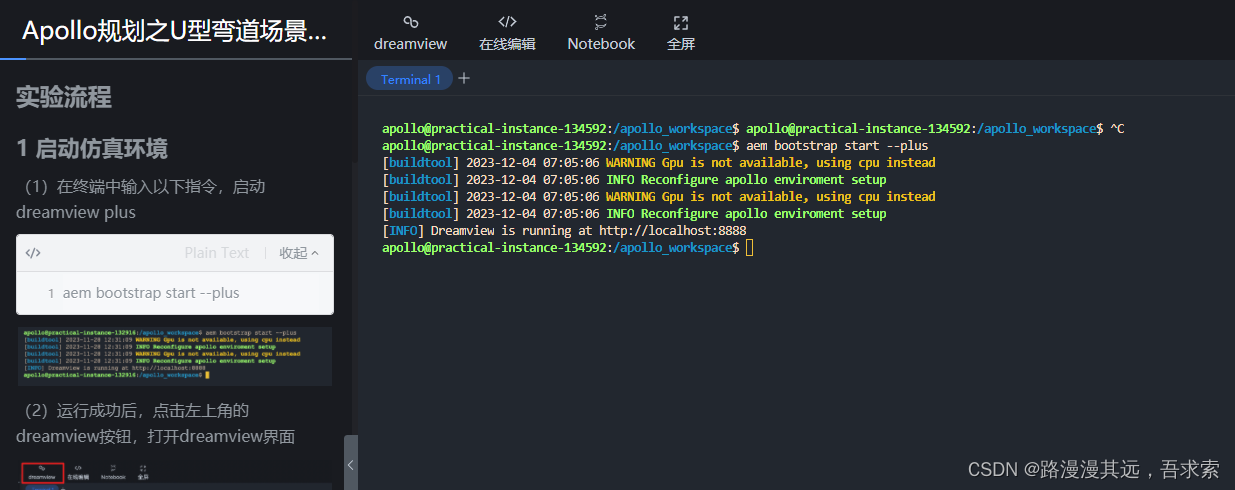
然后就可以选择你想仿真的模块(PNC、感知等),然后去配置你想设置的环境,运行就可以。

算法方面:主要是从三个方面进行了升级优化:采用了新的CenterPoin模型、提供了增量训练、新增支持4D毫米波。
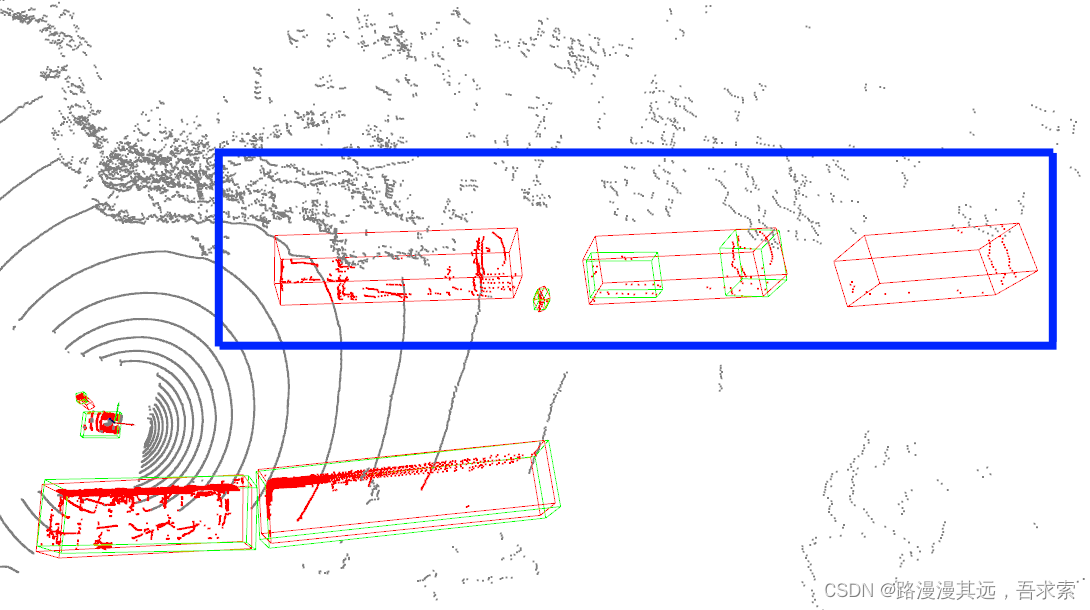
增量训练可以在原有检测能力下,显著提升特殊目标和特殊场景的检测能力,从而达到用低成本轻松提升定制场景的检测效果。
在演讲过程中,王老师举了一个挂车的例子,没有增量训练前,将挂车识别为两个物体
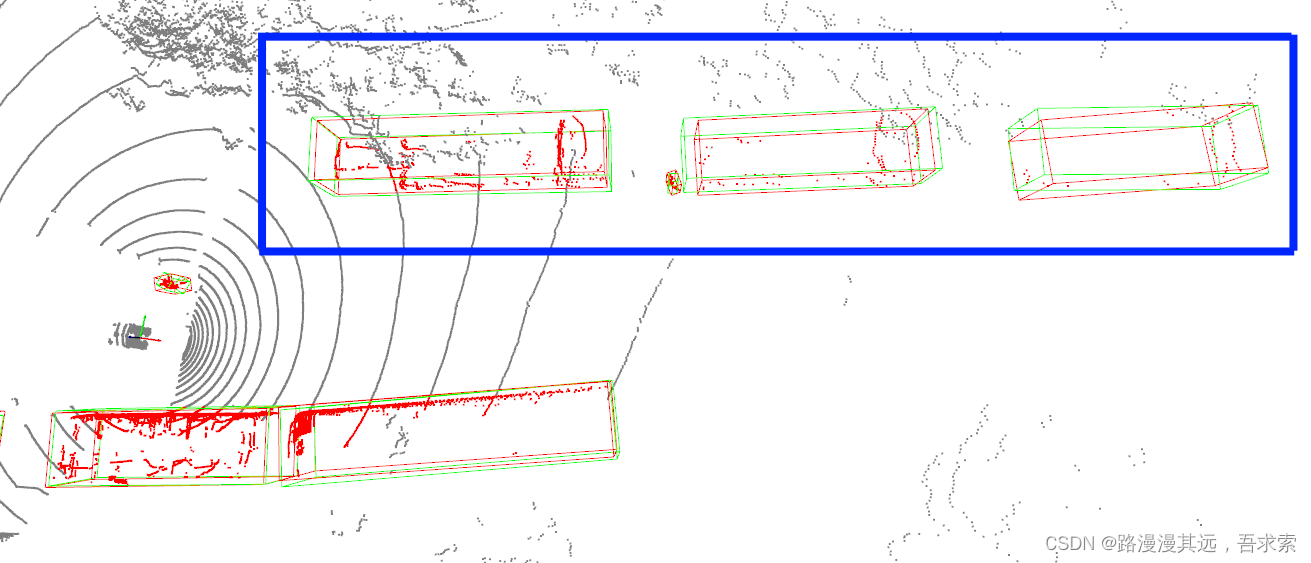
进行增量训练后,新模型监测效果,可以正常监测到这种特殊挂车。
4D毫米波主要是提高雨雪雾等特殊天气下的安全性。
最后就是一个开放性的交流会,大家畅所欲言,去找自己感兴趣模块的老师,整个环境也是很融洽,我这面也是听王老师去逐一讲解大家提出的问题,受益匪浅。
非常难得的一次线下交流会,学到了很多,使我对于无人驾驶的开发提起了兴趣,平常会去社区学习一下,开发出属于自己的无人驾驶。

原文地址:https://blog.csdn.net/lj19990824/article/details/134799343
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。
如若转载,请注明出处:http://www.7code.cn/show_49292.html
如若内容造成侵权/违法违规/事实不符,请联系代码007邮箱:suwngjj01@126.com进行投诉反馈,一经查实,立即删除!