一. 前言
Go 没有采用基于线程的并发模型,可能很多 Gopher 都好奇 Go 运行时究竟是如何将一个个 Goroutine 调度到 CPU 上执行的。当然,Goroutine 的调度本来是 Go 语言核心开发团队才应该关注的事情,大多数 Gopher 们无需关心。但就我个人的学习和实践经验而言,我觉得了解 Goroutine 的调度模型和原理,能够帮助我们编写出更高质量的 Go 代码。
Goroutine调度是一个很复杂的机制,尽管Go源码中提供了大量的注释,但对其原理没有一个好的理解的情况下去读源码收获不会很大。下面尝试用简单的语言描述一下Goroutine调度机制,在此基础上再去研读源码效果可能更好一些。
二. 基础知识
2.1 线程池的缺陷
我们知道,在高并发应用中频繁创建线程会造成不必要的开销,所以有了线程池。线程池中预先保存一定数量的线程,而新任务将不再以创建线程的方式去执行,而是将任务发布到任务队列,线程池中的线程不断地从任务队列中取出任务并执行,可以有效的减少线程创建和销毁所带来的开销。
下图展示一个典型的线程池:
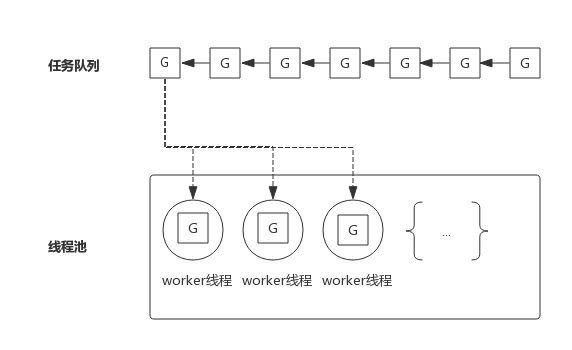
为了方便下面的叙述,我们把任务队列中的每一个任务称作G,而G往往代表一个函数。
线程池中的worker线程不断地从任务队列中取出任务并执行。而worker线程的调度则交给操作系统进行调度。
如果worker线程执行的G任务中发生系统调用,则操作系统会将该线程置为阻塞状态,也意味着该线程在怠工,也意味着消费任务队列的worker线程变少了,也就是说线程池消费任务队列的能力变弱了。
如果任务队列中的大部分任务都会进行系统调用,则会让这种状态恶化,大部分worker线程进入阻塞状态,从而任务队列中的任务产生堆积。
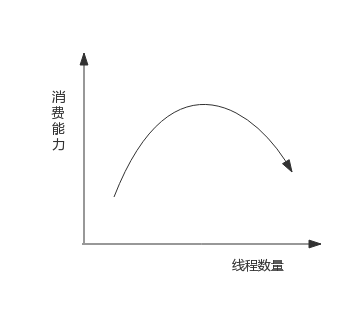
解决这个问题的一个思路就是重新审视线程池中线程的数量,增加线程池中线程数量可以一定程度上提高消费能力,但随着线程数量增多,由于过多线程争抢CPU,消费能力会有上限,甚至出现消费能力下降。 如下图所示:
2.2 Goroutine 调度器
2.2.1 调度器的历史
提到“调度”,我们首先想到的就是操作系统对进程、线程的调度。操作系统调度器会将系统中的多个线程按照一定算法调度到物理 CPU 上去运行。
前面我们也提到,传统的编程语言,比如 C、C++ 等的并发实现,多是基于线程模型的,也就是应用程序负责创建线程(一般通过 libpthread 等库函数调用实现),操作系统负责调度线程。当然,我们也说过,这种传统支持并发的方式有很多不足。
线程数过多,意味着操作系统会不断地切换线程,频繁的上下文切换就成了性能瓶颈。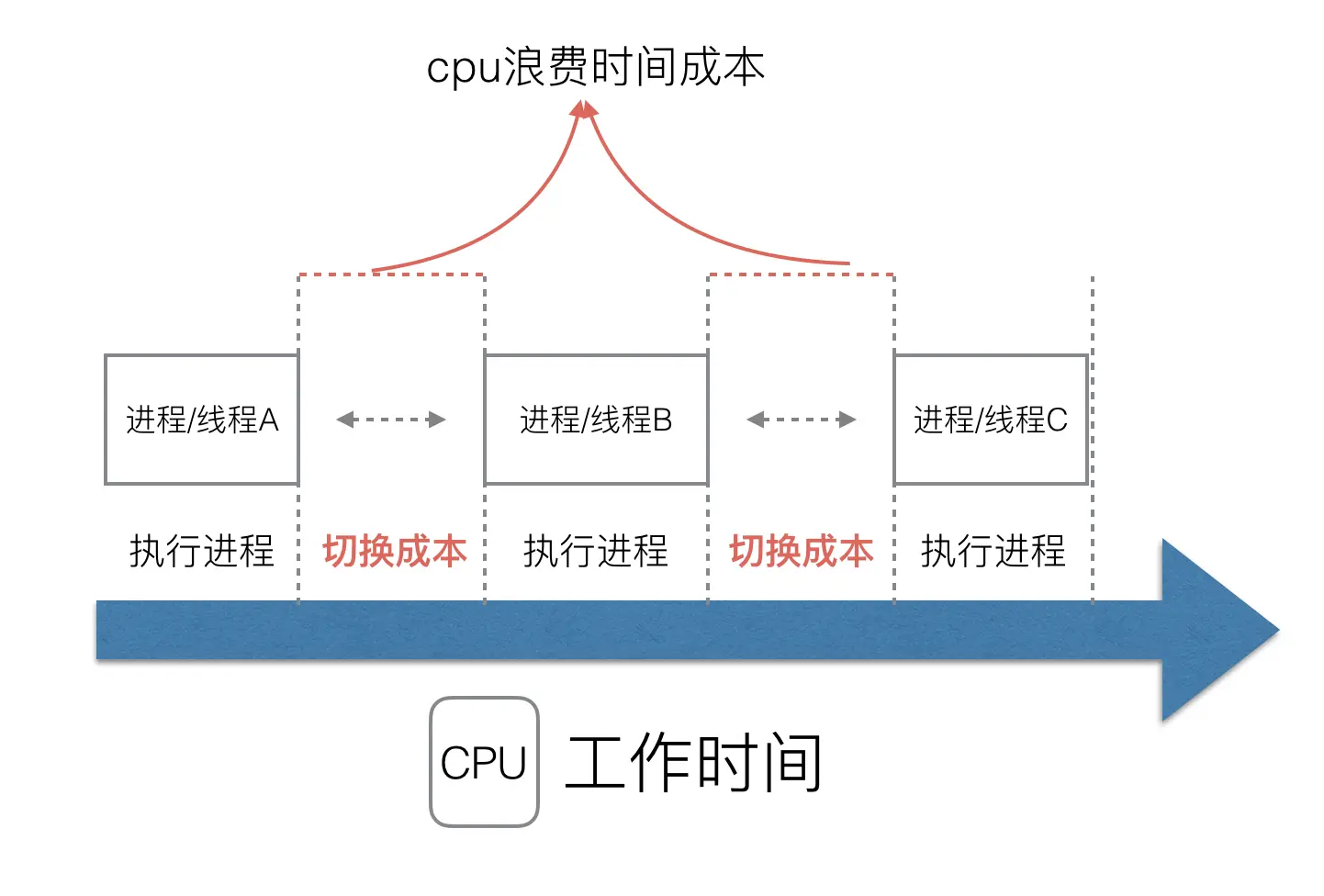
为了解决这些问题,Go 语言中的并发实现,使用了 Goroutine代替了操作系统的线程,也不再依靠操作系统调度。
Go提供一种机制,可以在线程中自己实现调度,上下文切换更轻量,从而达到了线程数少,而并发数并不少的效果,而线程中调度的就是Goroutine.
2.2.2 Goroutine 调度器出现的原因
Goroutine 占用的资源非常小,每个 Goroutine 栈的大小默认是 2KB。而且,Goroutine 调度的切换也不用陷入(trap)操作系统内核层完成,代价很低。
因此,一个 Go 程序中可以创建成千上万个并发的 Goroutine。而将这些 Goroutine 按照一定算法放到“CPU”上执行的程序,就被称为 Goroutine 调度器(Goroutine Scheduler),注意,这里说的“CPU”打了引号。
不过,一个 Go 程序对于操作系统来说只是一个用户层程序,操作系统眼中只有线程,它甚至不知道有一种叫 Goroutine 的事物存在。所以,Goroutine 的调度全要靠 Go 自己完成。那么,实现 Go 程序内 Goroutine 之间“公平”竞争“CPU”资源的任务,就落到了 Go 运行时(runtime)头上了。要知道在一个 Go 程序中,除了用户层代码,剩下的就是 Go 运行时了。
于是,Goroutine 的调度问题就演变为,Go 运行时如何将程序内的众多 Goroutine,按照一定算法调度到“CPU”资源上运行的问题了。
可是,在操作系统层面,线程竞争的“CPU”资源是真实的物理 CPU,但在 Go 程序层面,各个 Goroutine 要竞争的“CPU”资源又是什么呢?
Go 程序是用户层程序,它本身就是整体运行在一个或多个操作系统线程上的。所以这个答案就出来了:Goroutine 们要竞争的“CPU”资源就是操作系统线程。这样,Goroutine 调度器的任务也就明确了:将 Goroutine 按照一定算法放到不同的操作系统线程中去执行。
那么,Goroutine 调度器究竟是以怎样的算法模型,将 Goroutine 调度到不同的操作系统线程上去的呢?我们继续向下看。
Goroutine 调度器模型与演化过程
Goroutine 调度器的实现不是一蹴而就的,它的调度模型与算法也是几经演化,从最初的 G-M 模型、到 G-P-M 模型,从不支持抢占,到支持协作式抢占,再到支持基于信号的异步抢占,Goroutine 调度器经历了不断地优化与打磨。
2.2.3 G-M 模型
2012 年 3 月 28 日,Go 1.0 正式发布。在这个版本中,Go 开发团队实现了一个简单的 Goroutine 调度器。在这个调度器中,每个 Goroutine 对应于运行时中的一个抽象结构:G(Goroutine) ,
而被视作“物理 CPU”的操作系统线程,则被抽象为另外一个结构:M(machine)。
调度器的工作就是将 G 调度到 M 上去运行。为了更好地控制程序中活跃的 M 的数量,调度器引入了 GOMAXPROCS 变量来表示 Go 调度器可见的“处理器”的最大数量。
这个模型实现起来比较简单,也能正常工作,但是却存在着诸多问题。前英特尔黑带级工程师、现谷歌工程师德米特里·维尤科夫(Dmitry Vyukov)在其《Scalable Go Scheduler Design》一文中指出了 G-M 模型的一个重要不足:限制了 Go 并发程序的伸缩性,尤其是对那些有高吞吐或并行计算需求的服务程序。GM 调度过程如下:

M(内核线程)从加锁的Goroutine队列中获取G(协程)执行,如果G在运行过程中创建了新的G,那么新的G也会被放入全局队列中。这个问题主要体现在这几个方面:
- 单一全局互斥锁(Sched.Lock) 和集中状态存储的存在,导致所有 Goroutine 相关操作,比如创建、重新调度等,都要上锁;
- Goroutine 传递问题:G经常在 M 之间传递“可运行”的 Goroutine,这导致调度延迟增大,也增加了额外的性能损耗;
- 每个 M 都做内存缓存,导致内存占用过高,数据局部性较差;
- 由于系统调用(syscall)而形成的频繁的工作线程阻塞和解除阻塞,导致额外的性能损耗。
为了解决这些问题,德米特里·维尤科夫又亲自操刀改进了 Go 调度器,在 Go 1.1 版本中实现了 G-P-M 调度模型和 work stealing 算法,这个模型一直沿用至今。模型如下图所示:
2.3.4 Goroutine 调度器演化与分析
有人说过:“计算机科学领域的任何问题都可以通过增加一个间接的中间层来解决”,德米特里·维尤科夫的 G-P-M 模型恰是这一理论的践行者。你可以看到,德米特里·维尤科夫通过向 G-M 模型中增加了一个 P,让 Go 调度器具有很好的伸缩性。
P 是一个“逻辑 Proccessor”,每个 G(Goroutine)要想真正运行起来,首先需要被分配一个 P,也就是进入到 P 的本地运行队列(local runq)中。对于 G 来说,P 就是运行它的“CPU”,可以说:在 G 的眼里只有 P。但从 Go 调度器的视角来看,真正的“CPU”是 M,只有将 P 和 M 绑定,才能让 P 的 runq 中的 G 真正运行起来。
G-P-M 模型的实现算是Go调度器的一大进步,但调度器仍然有一个令人头疼的问题,那就是不支持抢占式调度,这导致一旦某个 G 中出现死循环的代码逻辑,那么 G 将永久占用分配给它的 P 和 M,而位于同一个 P 中的其他 G 将得不到调度,出现“饿死”的情况。
更为严重的是,当只有一个 P(GOMAXPROCS=1)时,整个 Go 程序中的其他 G 都将“饿死”。于是德米特里·维尤科夫又提出了《Go Preemptive Scheduler Design》并在 Go 1.2 中实现了基于协作的“抢占式”调度。
这个抢占式调度的原理就是,Go 编译器在每个函数或方法的入口处加上了一段额外的代码 (runtime.morestack_noctxt),让运行时有机会在这段代码中检查是否需要执行抢占调度。
这种解决方案只能说局部解决了“饿死”问题,只在有函数调用的地方才能插入“抢占”代码(埋点),对于没有函数调用而是纯算法循环计算的 G,Go 调度器依然无法抢占。
比如,死循环等并没有给编译器插入抢占代码的机会,这就会导致 GC 在等待所有 Goroutine 停止时的等待时间过长,从而导致 GC 延迟,内存占用瞬间冲高;甚至在一些特殊情况下,导致在 STW(stop the world)时死锁。
为了解决这些问题,Go 在 1.14 版本中接受了奥斯汀·克莱门茨(Austin Clements)的提案,增加了对非协作的抢占式调度的支持,这种抢占式调度是基于系统信号的,也就是通过向线程发送信号的方式来抢占正在运行的 Goroutine。
除了这些大的迭代外,Goroutine 的调度器还有一些小的优化改动,比如 通过文件 I/O poller 减少 M 的阻塞等。
Go 运行时已经实现了 netpoller,这使得即便 G 发起网络 I/O 操作,也不会导致 M 被阻塞(仅阻塞 G),也就不会导致大量线程(M)被创建出来。
但是对于文件 I/O 操作来说,一旦阻塞,那么线程(M)将进入挂起状态,等待 I/O 返回后被唤醒。这种情况下 P 将与挂起的 M 分离,再选择一个处于空闲状态(idle)的 M。如果此时没有空闲的 M,就会新创建一个 M(线程),所以,这种情况下,大量 I/O 操作仍然会导致大量线程被创建。
为了解决这个问题,Go 开发团队的伊恩·兰斯·泰勒(Ian Lance Taylor)在 Go 1.9 中增加了一个针对文件 I/O 的 Poller的功能,这个功能可以像 netpoller 那样,在 G 操作那些支持监听(pollable)的文件描述符时,仅会阻塞 G,而不会阻塞 M。不过这个功能依然不能对常规文件有效,常规文件是不支持监听的(pollable)。但对于 Go 调度器而言,这也算是一个不小的进步了。
从 Go 1.2 以后,Go 调度器就一直稳定在 G-P-M 调度模型上,尽管有各种优化和改进,但也都是基于这个模型之上的。那未来的 Go 调度器会往哪方面发展呢?德米特里·维尤科夫在 2014 年 9 月提出了一个新的设计草案文档:《NUMA‐aware scheduler for Go》,作为对未来 Goroutine 调度器演进方向的一个提议,不过至今似乎这个提议也没有列入开发计划。
通过前面对 Goroutine 调度器演化的分析,你可以看到,目前 G-M 模型已经废弃,NUMA 调度模型尚未实现,那么现在我们要理解如今的 Goroutine 调度,只需要学习 G-P-M 模型就可以了,接下来我们就来看看 G-P-M 模型下 Goroutine 的调度原理。
2.2.5 深入G-P-M 模型
Go 语言中 Goroutine 的调度、GC、内存管理等是 Go 语言原理最复杂、最难懂的地方,随便拿出一个都可以讲上几节课,并且这三方面的内容随着 Go 版本的演进也在不断更新。因为我们是入门课,所以这里我就只基于 Go 1.12.7 版本(支持基于协作的抢占式调度)给你粗略介绍一下基于 G-P-M 模型的调度原理,如果你还对这方面感兴趣,可以基于这些介绍深入到相关的 Go 源码中去,深入挖掘细节。
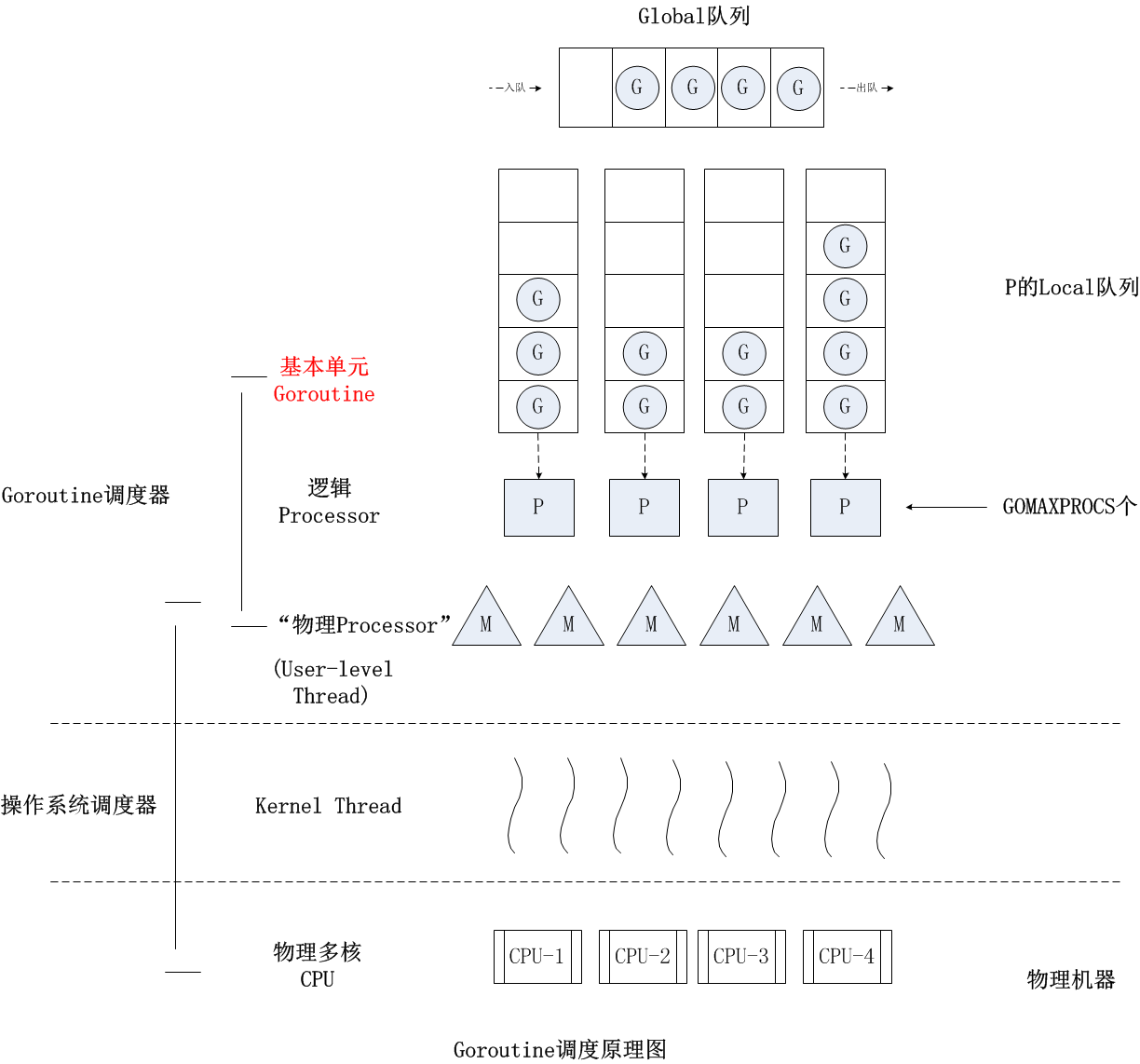
Go的调度器内部有三个重要的结构:M,P,G
- G: 代表 Goroutine,存储了 Goroutine 的执行栈信息、Goroutine 状态以及 Goroutine 的任务函数等,而且 G 对象是可以重用的;
- P: 代表逻辑 processor,P 的数量决定了系统内最大可并行的 G 的数量,P 的最大作用还是其拥有的各种 G 对象队列、链表、一些缓存和状态;
- M: M 代表着真正的执行计算资源。在绑定有效的 P 后,进入一个调度循环,而调度循环的机制大致是从 P 的本地运行队列以及全局队列中获取 G,切换到 G 的执行栈上并执行 G 的函数,调用 goexit 做清理工作并回到 M,如此反复。M 并不保留 G 状态,这是 G 可以跨 M 调度的基础。
用户空间线程和内核空间线程之间的映射关系有:N:1,1:1和M:N
N:1是说多个(N)用户线程始终在一个内核线程上跑,context上下文切换确实很快,但是无法真正的利用多核。1:1是说一个用户线程就只在一个内核线程上跑,这时可以利用多核,但是上下文switch很慢。M:N是说多个goroutine在多个内核线程上跑,这个看似可以集齐上面两者的优势,但是无疑增加了调度的难度。
我这里也给出了 G、P、M 定义的代码片段(注意:我们这里使用的是 Go 1.12.7 版本,随着 Go 演化,结构体中的字段定义可能会有不同),你也可以看一看:
//src/runtime/runtime2.go
type g struct {
stack stack // offset known to runtime/cgo
sched gobuf
goid int64
gopc uintptr // pc of go statement that created this goroutine
startpc uintptr // pc of goroutine function
... ...
}
type p struct {
lock mutex
id int32
status uint32 // one of pidle/prunning/...
mcache *mcache
racectx uintptr
// Queue of runnable goroutines. Accessed without lock.
runqhead uint32
runqtail uint32
runq [256]guintptr
runnext guintptr
// Available G's (status == Gdead)
gfree *g
gfreecnt int32
... ...
}
type m struct {
g0 *g // goroutine with scheduling stack
mstartfn func()
curg *g // current running goroutine
... ...
}
而 Goroutine 调度器的目标,就是公平合理地将各个 G 调度到 P 上“运行”,M必须拥有P才可以执行G中的代码,P含有一个包含多个G的队列,P可以调度G交由M执行。其关系如下图所示:
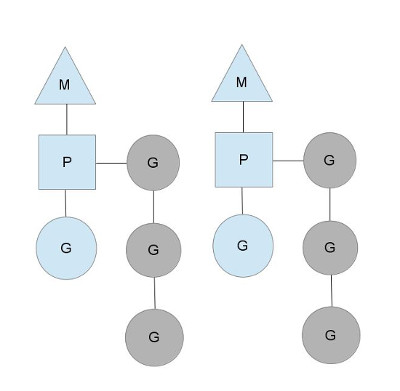
图中看有2个物理线程M,每一个M都拥有一个context(P),每一个也都有一个正在运行的goroutine。
P的数量可以通过GOMAXPROCS()来设置,它其实也就代表了真正的并发度,即有多少个goroutine可以同时运行。
图中灰色的那些goroutine并没有运行,而是出于ready的就绪态,正在等待被调度。P维护着这个队列(称之为runqueue),
Go语言里,启动一个goroutine很容易:go fun(){} 就行,所以每有一个go语句被执行,runqueue队列就在其末尾加入一个goroutine,在下一个调度点就从runqueue中取出(如何决定取哪个goroutine?)一个goroutine执行。
为何要维护多个上下文P?因为当一个OS线程被阻塞时,P可以转而投奔另一个OS线程!图中看到,当一个OS线程M0陷入阻塞时,P转而在OS线程M1上运行。调度器保证有足够的线程来运行所有的context P。
图中的M1可能是被创建,或者从线程缓存中取出;
当M0返回时,它必须尝试取得一个context P来运行goroutine,
一般情况下,它会从其他的OS线程那里steal偷一个context P过来执行G。如果没有偷到的话,它就把goroutine放在一个global runqueue里,然后自己就去睡大觉了(放入线程缓存里)。Contexts P们也会周期性的检查global runqueue,否则global runqueue上的goroutine永远无法执行。
另一种情况是P所分配的任务G很快就执行完了(分配不均),这就导致了一个上下文P闲着没事儿干而系统却任然忙碌。但是如果global runqueue没有任务G了,那么P就不得不从其他的上下文P那里拿一些G来执行。一般来说,如果上下文P从其他的上下文P那里要偷一个任务的话,一般就‘偷’run queue的一半,这就确保了每个OS线程都能充分的使用。

图中M是交给操作系统调度的线程,M持有一个P,P将G调度进M中执行。P同时还维护着一个包含G的队列(图中灰色部分),可以按照一定的策略将G调度到M中执行。
P的个数在程序启动时决定,默认情况下等同于CPU的核数,由于M必须持有一个P才可以运行Go代码,所以同时运行的M个数,也即线程数一般等同于CPU的个数,以达到尽可能的使用CPU而又不至于产生过多的线程切换开销。
程序中可以使用runtime.GOMAXPROCS()设置P的个数,在某些IO密集型的场景下可以在一定程度上提高性能。这个后面再详细介绍。
下面我们重点看看 G 是如何被调度的。
(1)G 被抢占调度
我们先来说常规情况,也就是如果某个 G 没有进行系统调用(syscall)、没有进行 I/O 操作、没有阻塞在一个 channel 操作上,调度器是如何让 G 停下来并调度下一个可运行的 G 的呢?
答案就是:G 是被抢占调度的。
前面说过,除非极端的无限循环,否则只要 G 调用函数,Go 运行时就有了抢占 G 的机会。Go 程序启动时,运行时会去启动一个名为 sysmon 的 M(一般称为监控线程),这个 M 的特殊之处在于它不需要绑定 P 就可以运行(以 g0 这个 G 的形式),这个 M 在整个 Go 程序的运行过程中至关重要,你可以看下我对 sysmon 被创建的部分代码以及 sysmon 的执行逻辑摘录:
//$GOROOT/src/runtime/proc.go
// The main goroutine.
func main() {
... ...
systemstack(func() {
newm(sysmon, nil)
})
.... ...
}
// Always runs without a P, so write barriers are not allowed.
//
//go:nowritebarrierrec
func sysmon() {
// If a heap span goes unused for 5 minutes after a garbage collection,
// we hand it back to the operating system.
scavengelimit := int64(5 * 60 * 1e9)
... ...
if .... {
... ...
// retake P's blocked in syscalls
// and preempt long running G's
if retake(now) != 0 {
idle = 0
} else {
idle++
}
... ...
}
}
我们看到,sysmon 每 20us~10ms 启动一次,sysmon 主要完成了这些工作:
- 释放闲置超过 5 分钟的 span 内存;
- 如果超过 2 分钟没有垃圾回收,强制执行;
- 将长时间未处理的 netpoll 结果添加到任务队列;
- 向长时间运行的 G 任务发出抢占调度;
- 收回因 syscall 长时间阻塞的 P;
我们看到 sysmon 将“向长时间运行的 G 任务发出抢占调度”,这个事情由函数retake实施:
// $GOROOT/src/runtime/proc.go
// forcePreemptNS is the time slice given to a G before it is
// preempted.
const forcePreemptNS = 10 * 1000 * 1000 // 10ms
func retake(now int64) uint32 {
... ...
// Preempt G if it's running for too long.
t := int64(_p_.schedtick)
if int64(pd.schedtick) != t {
pd.schedtick = uint32(t)
pd.schedwhen = now
continue
}
if pd.schedwhen+forcePreemptNS > now {
continue
}
preemptone(_p_)
... ...
}
func preemptone(_p_ *p) bool {
mp := _p_.m.ptr()
if mp == nil || mp == getg().m {
return false
}
gp := mp.curg
if gp == nil || gp == mp.g0 {
return false
}
gp.preempt = true //设置被抢占标志
// Every call in a go routine checks for stack overflow by
// comparing the current stack pointer to gp->stackguard0.
// Setting gp->stackguard0 to StackPreempt folds
// preemption into the normal stack overflow check.
gp.stackguard0 = stackPreempt
return true
}
从上面的代码中,我们可以看出,如果一个 G 任务运行 10ms,sysmon 就会认为它的运行时间太久而发出抢占式调度的请求。一旦 G 的抢占标志位被设为 true,那么等到这个 G 下一次调用函数或方法时,运行时就可以将 G 抢占并移出运行状态,放入队列中,等待下一次被调度。
不过,除了这个常规调度之外,还有两个特殊情况下 G 的调度方法。
第一种:channel 阻塞或网络 I/O 情况下的调度。
如果 G 被阻塞在某个 channel 操作或网络 I/O 操作上时,G 会被放置到某个等待(wait)队列中,而 M 会尝试运行 P 的下一个可运行的 G。如果这个时候 P 没有可运行的 G 供 M 运行,那么 M 将解绑 P,并进入挂起状态。当 I/O 操作完成或 channel 操作完成,在等待队列中的 G 会被唤醒,标记为可运行(runnable),并被放入到某 P 的队列中,绑定一个 M 后继续执行。
第二种:系统调用阻塞情况下的调度。
如果 G 被阻塞在某个系统调用(system call)上,那么不光 G 会阻塞,执行这个 G 的 M 也会解绑 P,与 G 一起进入挂起状态。如果此时有空闲的 M,那么 P 就会和它绑定,并继续执行其他 G;如果没有空闲的 M,但仍然有其他 G 要去执行,那么 Go 运行时就会创建一个新 M(线程)。
当系统调用返回后,阻塞在这个系统调用上的 G 会尝试获取一个可用的 P,如果没有可用的 P,那么 G 会被标记为 runnable,之前的那个挂起的 M 将再次进入挂起状态。
2.3 Goroutine调度策略
2.3.1 队列轮转
上图中可见每个P维护着一个包含G的队列,不考虑G进入系统调用或IO操作的情况下,P周期性的将G调度到M中执行,执行一小段时间,将上下文保存下来,然后将G放到队列尾部,然后从队列中重新取出一个G进行调度。
除了每个P维护的G队列以外,还有一个全局的队列,每个P会周期性地查看全局队列中是否有G待运行并将其调度到M中执行,全局队列中G的来源,主要有从系统调用中恢复的G。之所以P会周期性地查看全局队列,也是为了防止全局队列中的G被饿死。
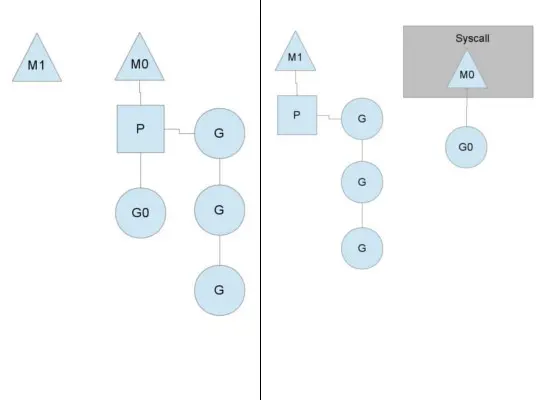
2.3.2 系统调用
上面说到P的个数默认等于CPU核数,每个M必须持有一个P才可以执行G,一般情况下M的个数会略大于P的个数,这多出来的M将会在G产生系统调用时发挥作用。类似线程池,Go也提供一个M的池子,需要时从池子中获取,用完放回池子,不够用时就再创建一个。
当M运行的某个G产生系统调用时,如下图所示:
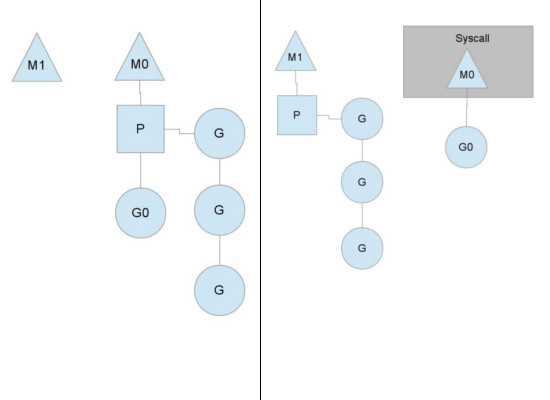
如图所示,当G0即将进入系统调用时,M0将释放P,进而某个空闲的M1获取P,继续执行P队列中剩下的G。而M0由于陷入系统调用而进被阻塞,M1接替M0的工作,只要P不空闲,就可以保证充分利用CPU。
M1的来源有可能是M的缓存池,也可能是新建的。当G0系统调用结束后,根据M0是否能获取到P,将会将G0做不同的处理:
- 如果有空闲的P,则获取一个P,继续执行G0。
- 如果没有空闲的P,则将G0放入全局队列,等待被其他的P调度。然后M0将进入缓存池睡眠。
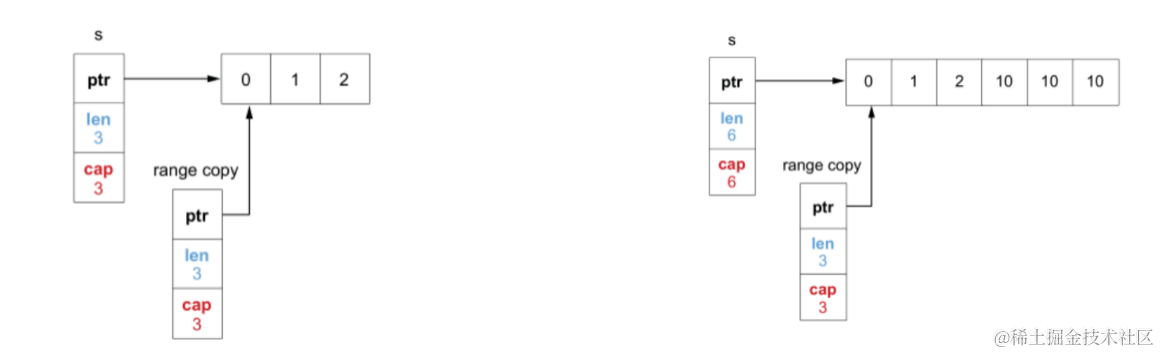
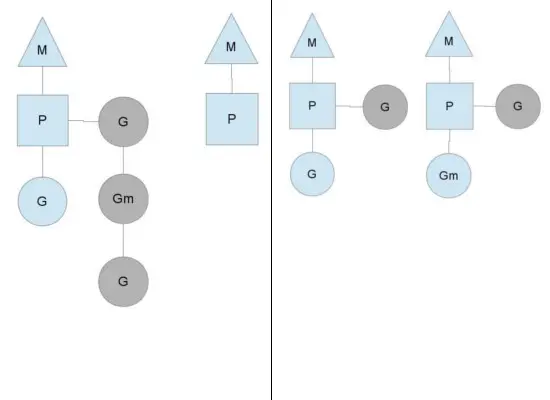
2.3.3 工作量窃取
多个P中维护的G队列有可能是不均衡的,比如下图:
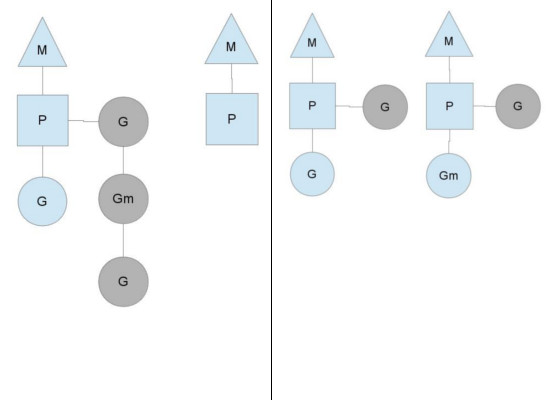
竖线左侧中右边的P已经将G全部执行完,然后去查询全局队列,全局队列中也没有G,而另一个M中除了正在运行的G外,队列中还有3个G待运行。此时,空闲的P会将其他P中的G偷取一部分过来,一般每次偷取一半。偷取完如右图所示。
三. 思考学习
3.1 配置参数
3.1.1 GOMAXPROCS设置对性能的影响
一般来讲,程序运行时就将GOMAXPROCS大小设置为CPU核数,可让Go程序充分利用CPU。
在某些IO密集型的应用里,这个值可能并不意味着性能最好。
理论上当某个Goroutine进入系统调用时,会有一个新的M被启用或创建,继续占满CPU。但由于Go调度器检测到M被阻塞是有一定延迟的,也即旧的M被阻塞和新的M得到运行之间是有一定间隔的,所以在IO密集型应用中不妨把GOMAXPROCS设置的大一些,或许会有好的效果。
3.2 思考题
3.2.1 关于支持非协作的抢占式调度
为了让你更好理解 Goroutine 调度原理。请看下面代码:
func deadloop() {
for {
}
}
func main() {
go deadloop()
for {
time.Sleep(time.Second * 1)
fmt.Println("I got scheduled!")
}
}
问题描述:
- 在一个拥有多核处理器的主机上,使用 Go 1.13.x 版本运行这个示例代码,你在命令行终端上是否能看到“I got scheduled!”输出呢?也就是 main goroutine 在创建 deadloop goroutine 之后是否能继续得到调度呢?
- 我们通过什么方法可以让上面示例中的 main goroutine,在创建 deadloop goroutine 之后无法继续得到调度?
答案分析:如果是go1.13的话加上runtime.GOMAXPROCS(1) main goroutine在创建 deadloop goroutine 之后就无法继续得到调度。但是 如果是go1.14之后的话即使加上runtime.GOMAXPROCS(1) main goroutine在创建 deadloop goroutine 之后还是可以得到调度,应该是因为增加了对非协作的抢占式调度的支持。
Goroutine特点及总结
1)Go1.13及以前,不支持抢占式调度,导致一旦某个 G 中出现死循环的代码逻辑,那么 G 将永久占用分配给它的 P 和 M,而位于同一个 P 中的其他 G 将得不到调度,出现“饿死”的情况。
2)Go1.14及以后,开始支持非协作的抢占式调度,这种抢占式调度是基于系统信号的,也就是通过向线程发送信号的方式来抢占正在运行的 Goroutine,避免发生”饿死”的情况。
四. 总结
基于 Goroutine 的并发设计离不开一个高效的生产级调度器。Goroutine 调度器演进了十余年,先后经历了 G-M 模型、G-P-M 模型和 work stealing 算法、协作式的抢占调度以及基于信号的异步抢占等改进与优化,目前 Goroutine 调度器相对稳定和成熟,可以适合绝大部分生产场合。
现在的 G-P-M 模型和最初的 G-M 模型相比,通过向 G-M 模型中增加了一个代表逻辑处理器的 P,使得 Goroutine 调度器具有了更好的伸缩性。
M 是 Go 代码运行的真实载体,包括 Goroutine 调度器自身的逻辑也是在 M 中运行的。
P 在 G-P-M 模型中占据核心地位,它拥有待调度的 G 的队列,同时 M 要想运行 G 必须绑定一个 P。一个 G 被调度执行的时间不能过长,超过特定长的时间后,G 会被设置为可抢占,并在下一次执行函数或方法时被 Go 运行时移出运行状态。
如果 G 被阻塞在某个 channel 操作或网络 I/O 操作上时,M 可以不被阻塞,这避免了大量创建 M 导致的开销。但如果 G 因慢系统调用而阻塞,那么 M 也会一起阻塞,但在阻塞前会与 P 解绑,P 会尝试与其他 M 绑定继续运行其他 G。但若没有现成的 M,Go 运行时会建立新的 M,这也是系统调用可能导致系统线程数量增加的原因,你一定要注意这一点。
参考材料
原文地址:https://blog.csdn.net/qq_41893274/article/details/128279755
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。
如若转载,请注明出处:http://www.7code.cn/show_51185.html
如若内容造成侵权/违法违规/事实不符,请联系代码007邮箱:suwngjj01@126.com进行投诉反馈,一经查实,立即删除!