本文介绍: 单位是毫米。
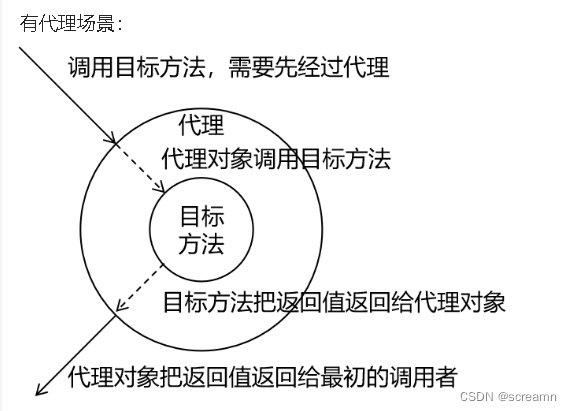
引言:在实际工程项目中,为了提高系统的响应速度和稳定性,往往需要采用一定的控制算法进行目标跟踪。这里抛砖引玉,仅采用简单的PID算法进行目标的跟随控制,目标的识别依然采用yolo。对系统要求更高的,可以对算法进行改进,也欢迎读者与我们联系,合作开发。
步骤一:打开摄像头
注意:为了获取目标物的三维位置信息,我们采用了D435深度摄像头,仅供参考,可根据需要自行选择即可
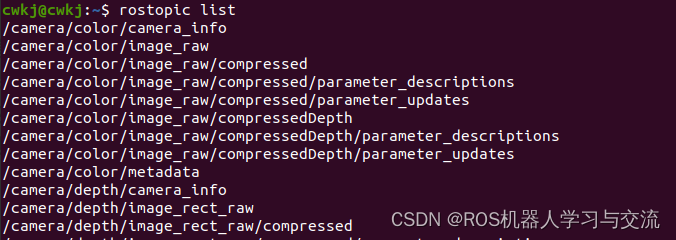
查看话题,需要/camera/color/image_raw和/camera/depth/image_rect_raw
步骤二:打开yolo识别节点,具体yolo版本可以根据需要选择
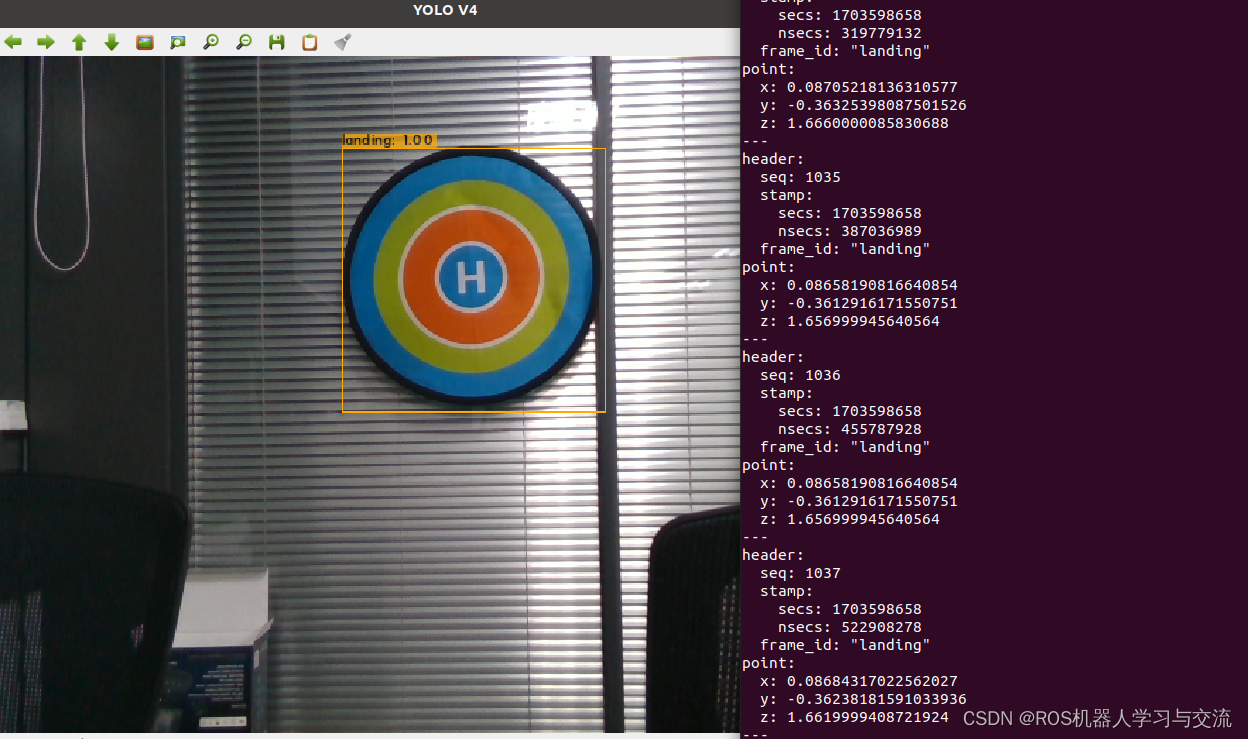
没有报错的情况下,会弹出识别效果图,如下:
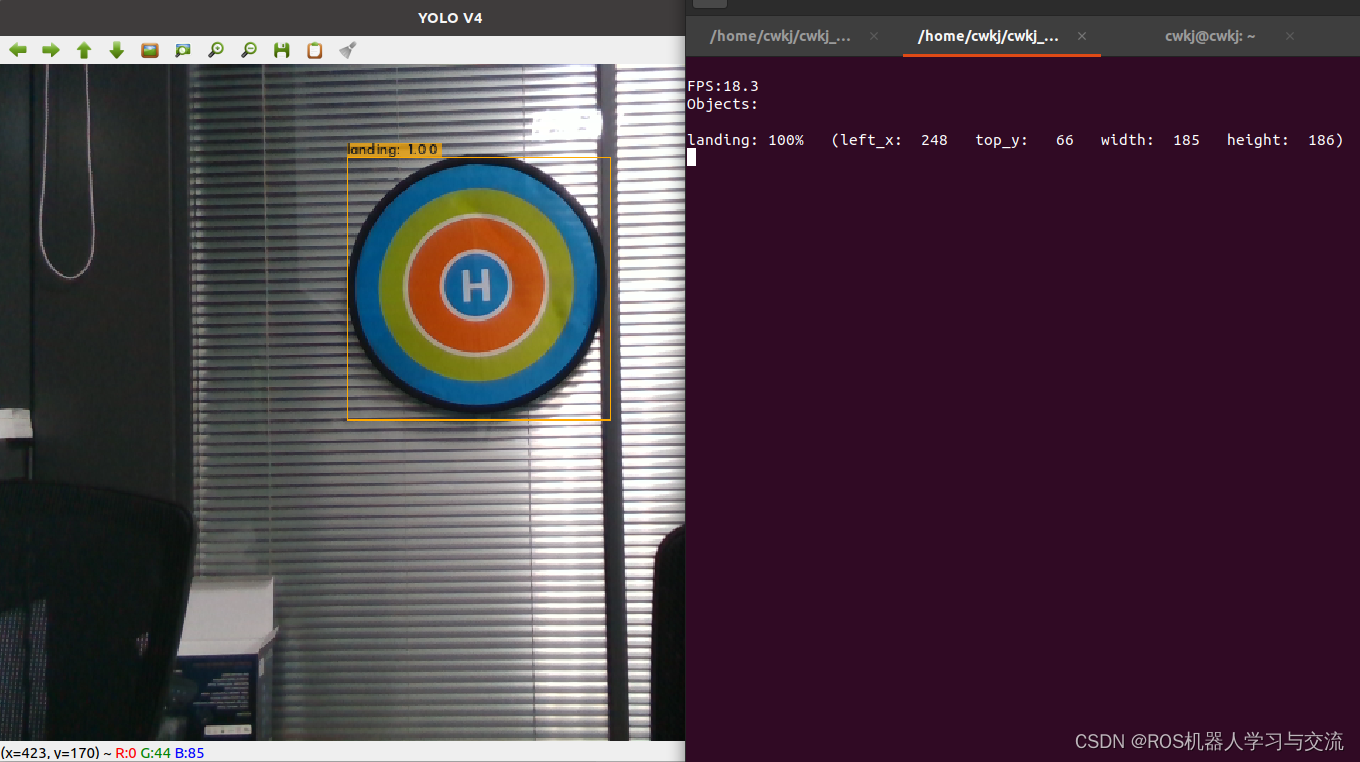 ## 注:我这里训练的是自己打印的H型地标,具体可以根据需要选择合适的目标物
## 注:我这里训练的是自己打印的H型地标,具体可以根据需要选择合适的目标物
步骤三:打开三维坐标转换节点
该节点可以直接一话题的形式输出目标物的名称和真实的位置信息
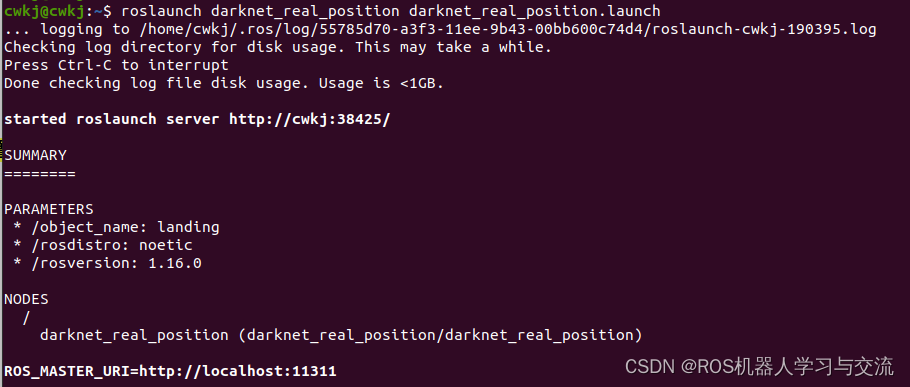
launch文件解析
此处的launch文件,以参数的方式指定了识别目标。比如landing,因此这个节点只会把指定的landing地标位置信息打印出来,其他的目标通通忽略

查看话题数据/object_position
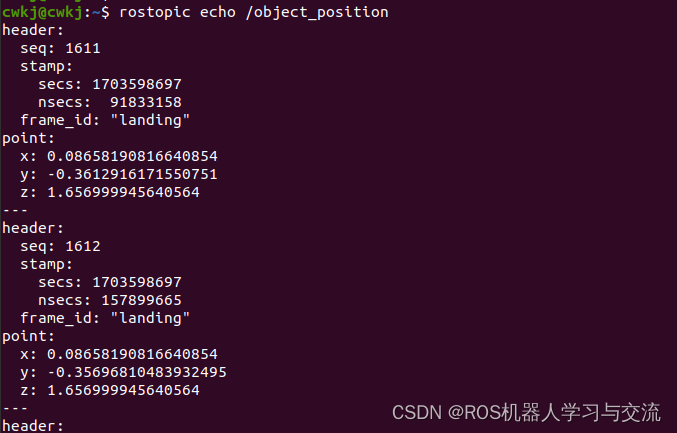
从上述图片可以看出,系统非常准确的给出了目标物的名称和真实的位置信息,单位是米。需要指出的是,这里的位置是相对于D435摄像头的位置信息,X表示横向位置,Y表示纵向位置,Z表示实际的距离信息
步骤四:启动PID跟随节点。注意,可以先不要启动mavros,仅仅测试PID控制器发布出的速度是否正确。在确认了没问题后在启动mavros节点,无人机就可以进行正常的跟随运动了
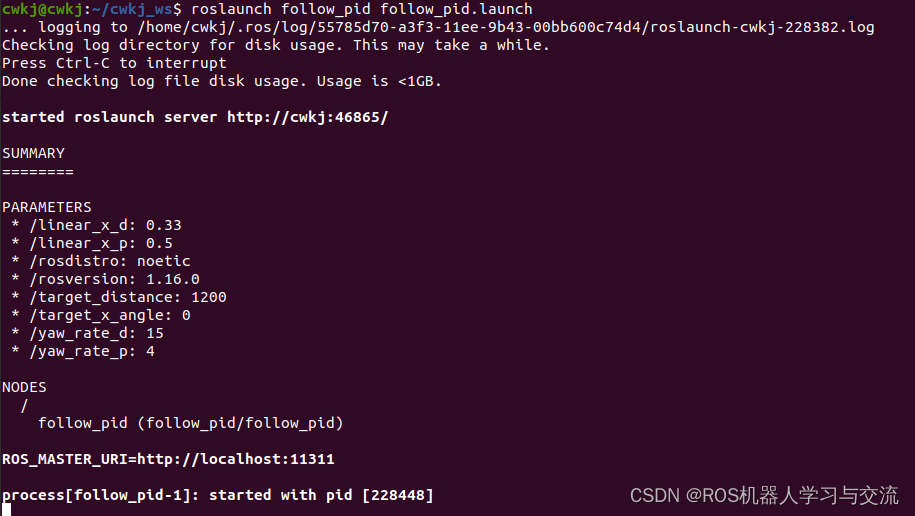
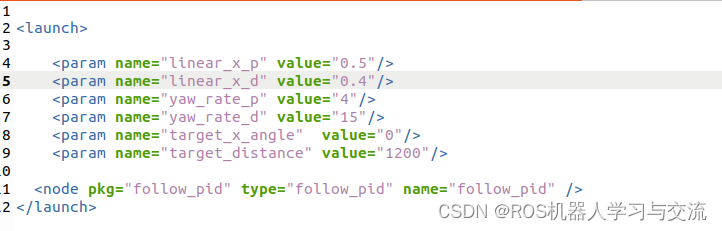
launch文件解析
这里仅仅进行偏航角度和距离的控制,如果需要对高度方向控制。可以直接复制代码进行简单的修改即可。参数linear_x_p和linear_x_d是距离的PID控制,同理yaw_rate_p和yaw_rate_d是角度的控制。参数target_x_angle是期望保持的角度,通常设置为0即可。最后参数target_distance是期望保持的距离,单位是毫米
代码如下:
步骤五:在上述基础上再打开mavros,即可开始跟随控制。代码后续会在B站进行讲解。同时会提供相应的实机演示。链接会在后续给出。
声明:本站所有文章,如无特殊说明或标注,均为本站原创发布。任何个人或组织,在未征得本站同意时,禁止复制、盗用、采集、发布本站内容到任何网站、书籍等各类媒体平台。如若本站内容侵犯了原著者的合法权益,可联系我们进行处理。