本文介绍: Dora-rs[1] 是一个基于 Rust 实现的化机器人框架,其具有极高的实时性能。Dora-rs使用Rust语言做数据流的传输和调度管理,可以大大减少了数据的重复拷贝和传输。它提供了Rust语言和Python语言之间的无缝集成,减少了跨语言的性能代价。Dora-rs通过YAML脚本配置节点、节点之间的数据流。:Dora 目前提供 Rust 、Cpp 、Python三种语言。:Dora-rs 性能是ROS2 Python API 的 17 倍!是 ROS2 Rust API 的 10 倍!
1、dora简介
Dora-rs[1] 是一个基于 Rust 实现的化机器人框架,其具有极高的实时性能。Dora-rs使用Rust语言做数据流的传输和调度管理,可以大大减少了数据的重复拷贝和传输。它提供了Rust语言和Python语言之间的无缝集成,减少了跨语言的性能代价。Dora-rs通过YAML脚本配置节点、节点之间的数据流。
多语言支持:Dora 目前提供 Rust 、Cpp 、Python三种语言。
性能:Dora-rs 性能是ROS2 Python API 的 17 倍!是 ROS2 Rust API 的 10 倍!与 ROS2 C/Cpp API 共享内存快 0.06 ms。(图片来源于github[1]) (对Python有很强的优化能力,对C++性能提升不大)
 )
)
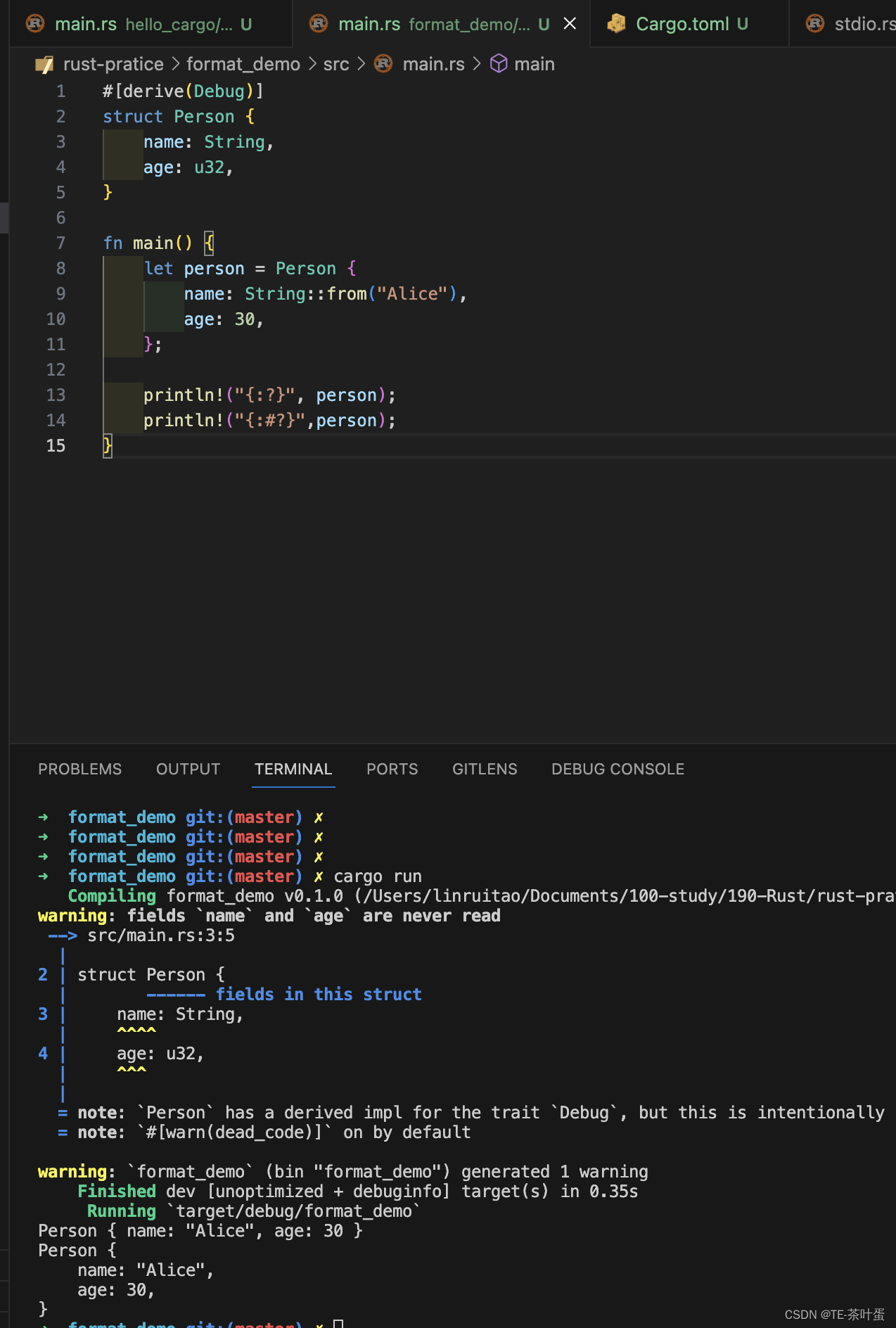
2、dora安装
dora_安装文档(官方提供三种安装方法,推荐使用二进制安装):https://dora.carsmos.ai/docs/guides/Installation/installing/
dora_rs版本为 V0.3.0
注意python版本 必须要3.11.5
2.1 二进制安装
 )
)3、运行测试程序
3.1 first project
3.2 编写节点
3.3 启动程序
3.4 查看节点输出

4 注意事项
 则按照提示信息执行命令安装dora 即可
则按照提示信息执行命令安装dora 即可参考资料
声明:本站所有文章,如无特殊说明或标注,均为本站原创发布。任何个人或组织,在未征得本站同意时,禁止复制、盗用、采集、发布本站内容到任何网站、书籍等各类媒体平台。如若本站内容侵犯了原著者的合法权益,可联系我们进行处理。