本文介绍: 电量库伦(CCCqqq电流安培(AAAiii——idedtidtde流速电压伏特(VVVeee电阻欧姆(ΩvarOmegaΩRRR——eRiReRiR电容法拉(FFFCCC——qCeCeC1Cq1C∫0tidtqCeCeCC1qC1∫0tidt电感亨利(HHHLLL——eLLdidtLi′eLLdtd。
-时间
位移:
s
s
s , 速度:
d
x

4.3 传递函数 Transfer Function


5. 一阶系统的单位阶跃响应(step response),时间常数(Time Constant)



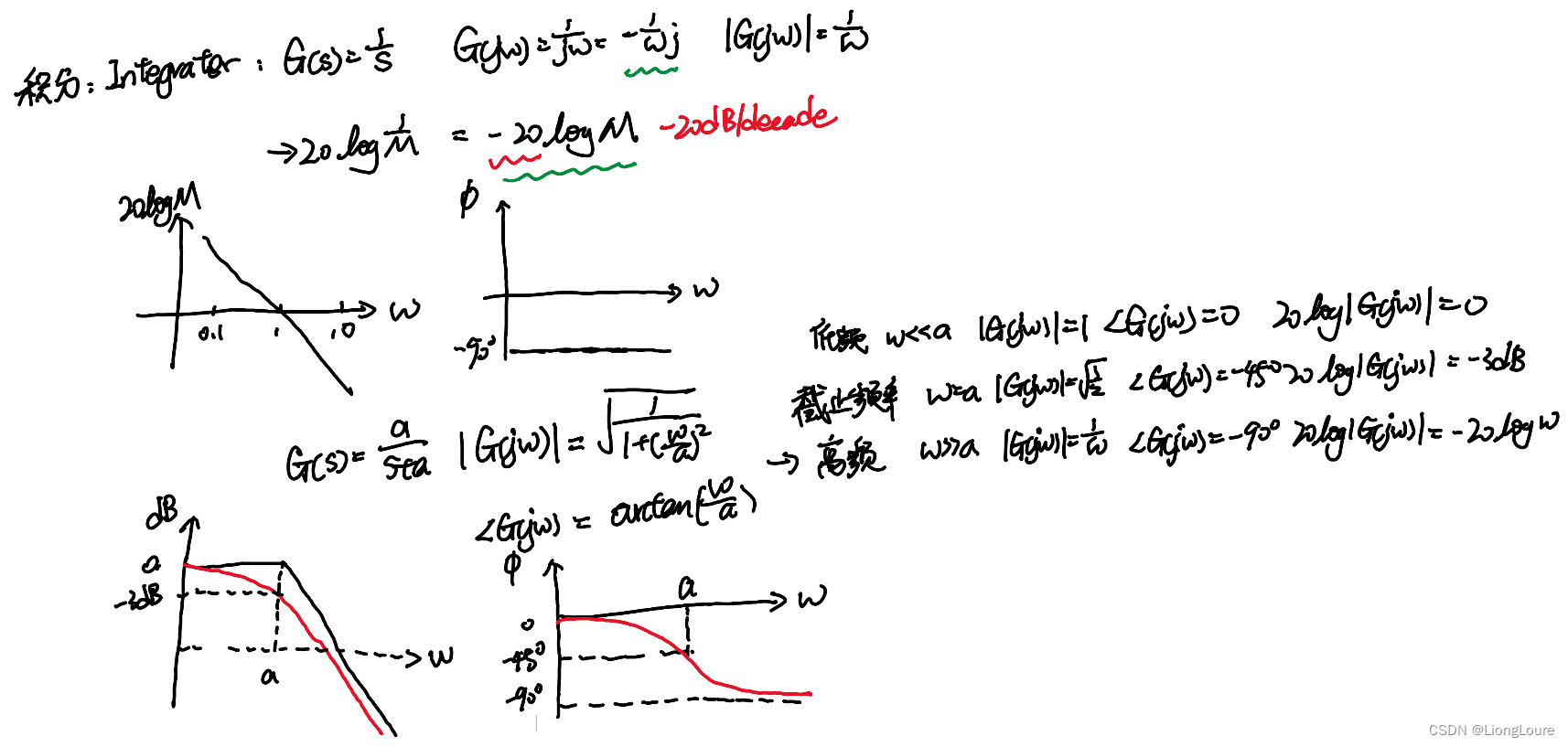
6. 频率响应与滤波器






7. 二阶系统
7.1 二阶系统对初始条件的动态响应 Matlab/Simulink – 2nd Order Syetem Response to IC



7.2 二阶系统的单位阶跃响应 2nd Order System Unit Step Response



7.3 二阶系统单位阶跃的性能分析与比较 2nd Order System Unit Step Response


7.4 共振现象-二阶系统频率响应,现象部分

7.5 二阶系统的频率响应

8. 二阶系统的频率响应



声明:本站所有文章,如无特殊说明或标注,均为本站原创发布。任何个人或组织,在未征得本站同意时,禁止复制、盗用、采集、发布本站内容到任何网站、书籍等各类媒体平台。如若本站内容侵犯了原著者的合法权益,可联系我们进行处理。



![[软件工具]文档页数统计工具软件pdf统计页数word统计页数ppt统计页数图文打印店快速报价工具](https://img-blog.csdnimg.cn/direct/09dfbaff3e9a47a9a551dd65fef5d482.jpeg)