本文介绍: RGB,RGB-D,单目,双目,sterro相机,实例相机介绍
相机—特点及区别
1.相机种类
RGB,RGB-D,单目,双目,sterro相机,实例相机
2.相机特点
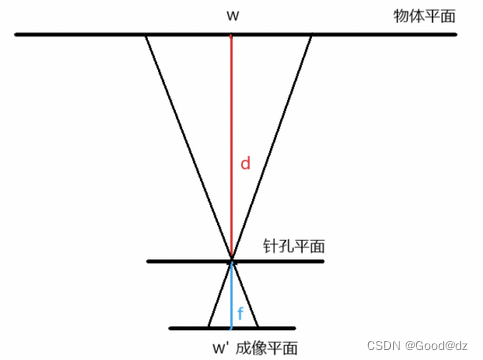
2.1单目
只使用一个摄像头进行SLAM,结构简单,成本低
三维空间的二维投影
必须移动相机,才能估计场景中物体的远近和大小
单目SLAM估计的轨迹和地图与真实的相差一个因子
2.2双目
由两个单目相机组成,两个相机之间的距离(基线)是已知的
2.3RGB
2.4RGB-D
2.5stereo相机
2.6实例相机
2.7双目相机和立体相机关系
声明:本站所有文章,如无特殊说明或标注,均为本站原创发布。任何个人或组织,在未征得本站同意时,禁止复制、盗用、采集、发布本站内容到任何网站、书籍等各类媒体平台。如若本站内容侵犯了原著者的合法权益,可联系我们进行处理。