本文介绍: 基于opencv的指针式仪表的识别与读数。指针识别#指针读数,仪表识别,仪表指针读数
对于指针式仪表的识别与读数,可以通过以下步骤使用OpenCV实现:

以上就是通过OpenCV对指针式仪表进行读数的一般步骤。根据实际情况,你可能需要调整参数、采取不同的滤波方法或添加其他处理步骤来适应不同的仪表图像。
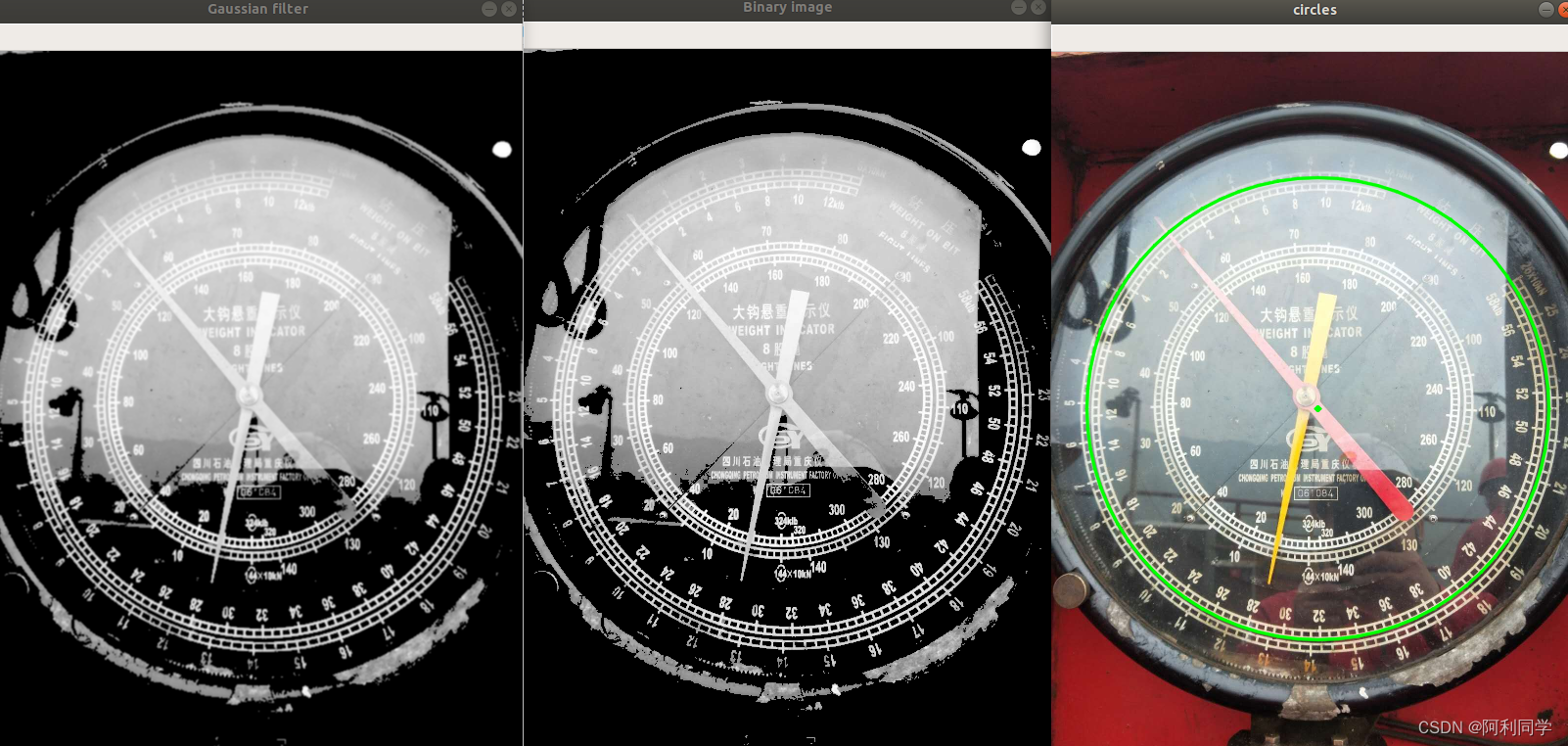
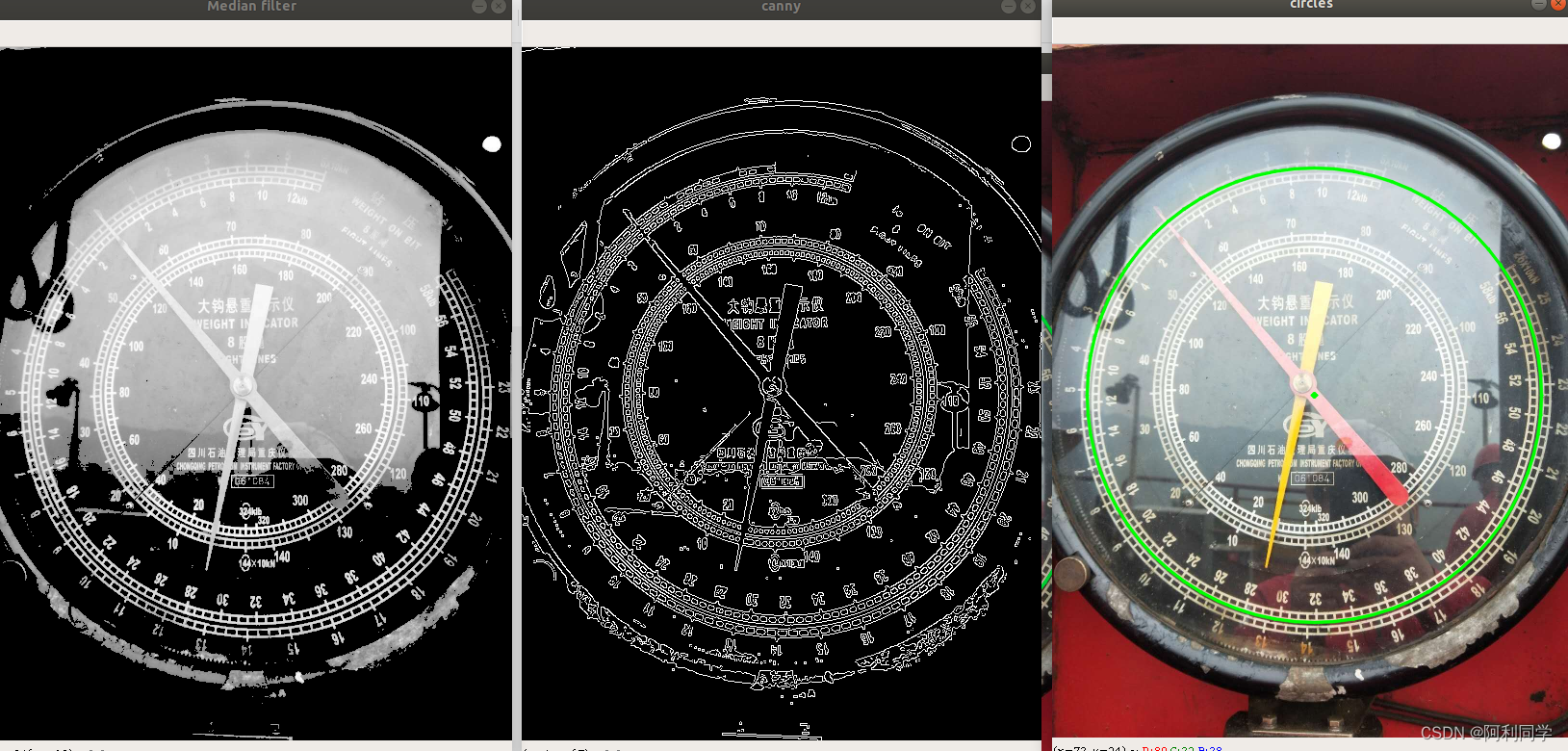
结果展示
可以看出下图给出了角度值,通过圆盘的固定尺度的丈量,就可以自动化推理出,指数是多少。

代码与总结
要基于OpenCV对指针式仪表进行读数,可以采用以下步骤:
最后
声明:本站所有文章,如无特殊说明或标注,均为本站原创发布。任何个人或组织,在未征得本站同意时,禁止复制、盗用、采集、发布本站内容到任何网站、书籍等各类媒体平台。如若本站内容侵犯了原著者的合法权益,可联系我们进行处理。