操作环境:
MATLAB 2022a
1、算法描述
1. 雷达系统参数设定:
– 工作频率:选择一个适合的工作频率,例如X波段(8-12 GHz)。
– 脉冲重复频率(PRF):设定一个适当的PRF,确保雷达覆盖所需的范围。
– 天线增益和波束宽度:根据目标探测的需求确定天线的增益和波束宽度。
2. 目标和环境模拟:
– 目标建模:在感兴趣的区域内放置多个目标,这些目标可以是不同大小和反射特性的点目标。
– 环境因素:考虑环境因素,如地面杂波、大气影响和系统噪声。
3. 雷达信号发射与回波接收:
– 脉冲发射:模拟雷达发射窄脉冲信号。
– 信号传播:考虑信号在到达目标和返回过程中的传播延迟和衰减。
– 回波收集:收集从各个目标反射回来的信号。
4. 目标检测与定位:
– 图像分析:应用图像处理技术(如边缘检测)来识别图像中的目标。
– 目标定位:确定目标在图像中的精确位置。
5. 目标跟踪(卡尔曼滤波):
– 初始化卡尔曼滤波器:根据目标的初步位置和运动设定滤波器的初始状态。
– 预测与更新:在连续的时间步内,对目标位置进行预测,并用新的观测数据更新预测。
– 处理噪声和不确定性:利用卡尔曼滤波处理测量噪声和其他不确定性,以提高目标跟踪的准确性。
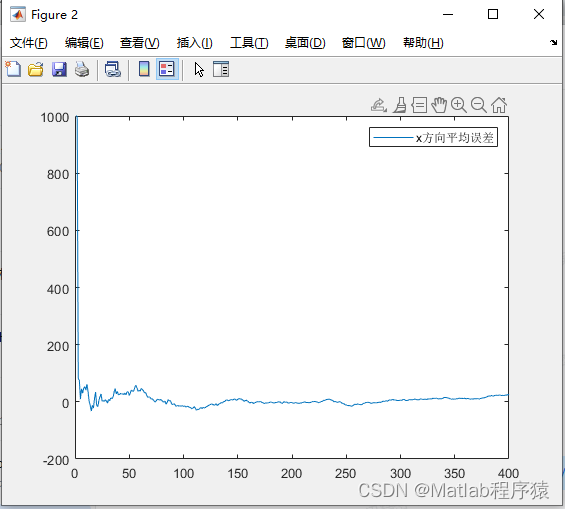
2、仿真结果演示

3、关键代码展示
略
4、MATLAB 源码获取
V
点击下方名片
原文地址:https://blog.csdn.net/Koukesuki/article/details/135455806
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。
如若转载,请注明出处:http://www.7code.cn/show_56930.html
如若内容造成侵权/违法违规/事实不符,请联系代码007邮箱:suwngjj01@126.com进行投诉反馈,一经查实,立即删除!