论文题目:A Real-Time Motion Planner with Trajectory Optimization for Autonomous Vehicles
Abstract
本文的实时规划器首先将空间离散化,然后基于一组成本函数搜索出最佳轨迹。迭代优化所得到的轨迹的Path和Speed。post-optimization计算复杂度低,能够在几次迭代内收敛到一个更高质量的解,该框架可以减少52%的规划时间,提高规划质量。
I INTRODUCTION
A Background
规划器需要满足严格的实时要求,以便在紧急情况做出足够快的反应。
B Related work
Autonomous driving Systems:对自动驾驶系统的发展做了一些调研。单纯的自适应巡航控制系统和车道辅助系统无法执行复杂的驾驶行为(处理并车、绕开其他汽车、能够智能的对意外的动态障碍物作出反应),这些系统仍需要人类监督执行。
Trajectory generation:道路场景中自动驾驶的轨迹生成需要考虑三个约束:运动学、动力学和道路形状。具体来说,就是曲率和加速度的变化率在轨迹中应该是连续的
[3][4]提出了利用曲率多项式保证曲率变化率连续的逆路径生成方法。
(1)基于[3][4]的方法,[5][6]提出的规划器首先沿道路采样端点,然后使用曲率多项式连接它们,便于所有的路径符合道路形状;然后给每条路径指定不同的加速度曲线来生成一组轨迹。
(2)[6]中生成的路径可以被车辆很好地跟踪。但是由于加速度曲线不连续,车辆很难准确、平稳地跟随加速度曲线。
(3)[7]使用另一种方法处理这个问题,使用五次多项式生成横向d(t)和纵向轨迹s(t),确保了连续地加速度曲线。此外他们使用道路中心线为参考的Frenet坐标系结合横向和纵向运动。使得轨迹纵向与道路形状一致。然而,每个轨迹上的每个点的曲率需要被计算和验证,计算量大。另外,虽然曲率是连续的,但是曲率的一阶导(和方向盘转角相关)频繁改变,导致方向盘移动不平稳。
Search algorithm:轨迹生成之后,通常应用搜索算法来找到最优结果。state lattice planners通常基于启发式(A和ARA[8])或采样(RRT[9])。
(1)基于启发式的搜索算法,对成本的准确估计从任何一个顶点到目标都是必不可少的。但自动驾驶规划问题很复杂,特别是当存在动态障碍物时,很难找到适合所有场景的适当启发式函数。
(2)一些增量重规划算法(D*Lite[10])广泛应用于机器人导航,但它们仅适用于具有一个固定目标的典型规划问题,但是在道路场景下,目标会一直变化。
(3)基于采样的方法(RRT[9]),规划结果通常不够平滑,无法让汽车执行。另外,==由于动态障碍物的存在,需要在搜索状态空间中加入时间作为额外的维度。==使得搜索空间呈指数增长,导致基于搜索的算法效率低下。因此,本文应用状态空间的离散化,然后应用简单而快速的穷举搜索。
Optimization method for planning:[11]提出了一种共轭梯度法来平滑路径。然而,车辆的速度没有规划或优化。因此,该算法在道路环境中不能很好地工作,速度对于驾驶非常重要,特别是处理动态障碍物。[12]提出了用于运动规划的梯度优化方法,能够更好地避免静态障碍物。但是,他们的方法也没有考虑时间维度或者速度。
C Contribution
在related work的基础上,提出了一种实时的运动规划器。该Planner具有以下特点:(1)由规划器生成的轨迹是平滑且连续的,在运动学上可以被车辆执行(2)通过有效路径和速度离散化加速最优轨迹搜索(3)通过post-optimization补偿离散化牺牲的性能(4)通过在路径和速度空间中迭代优化来提高实时性能。
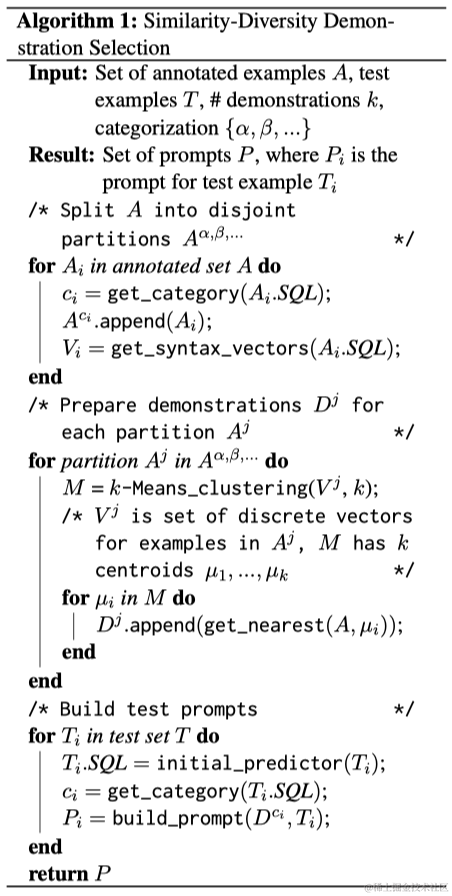
II Algorithm Framework

实时运动规划器如上图所示,由轨迹规划和轨迹优化两部分组成,第一步,使用[3]中描述的方法生成路径边缘;然后为每个路径边生成速度集;将一组成本函数应用在每个轨迹上,并选择最佳轨迹。然后将生成的最佳轨迹传递到优化模块,在优化模块中,使用随机-定向单纯形优化算法迭代优化路径和速度[13]。















 其中
其中