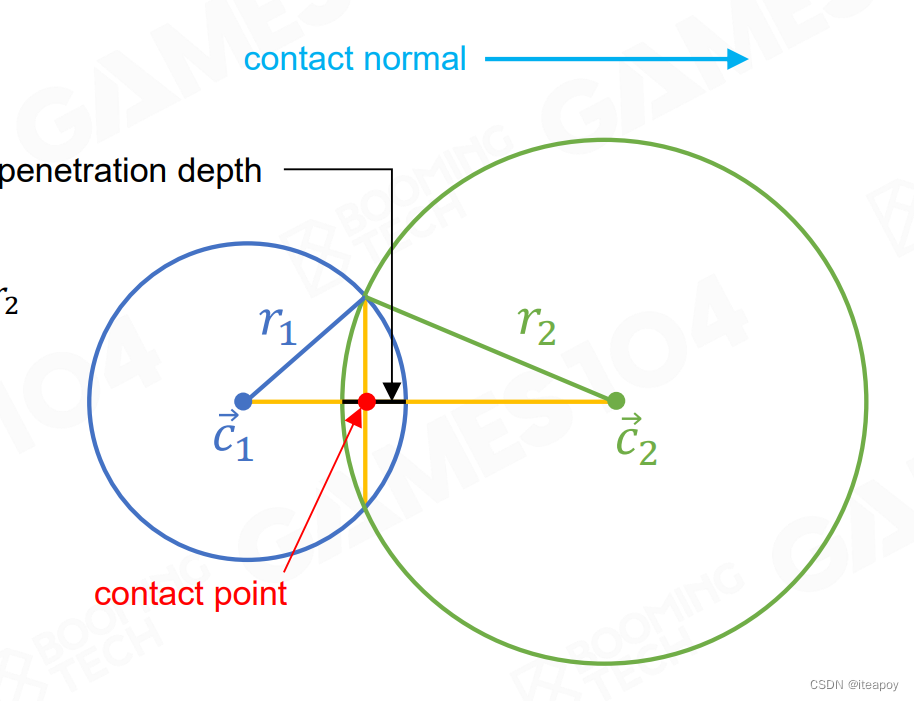
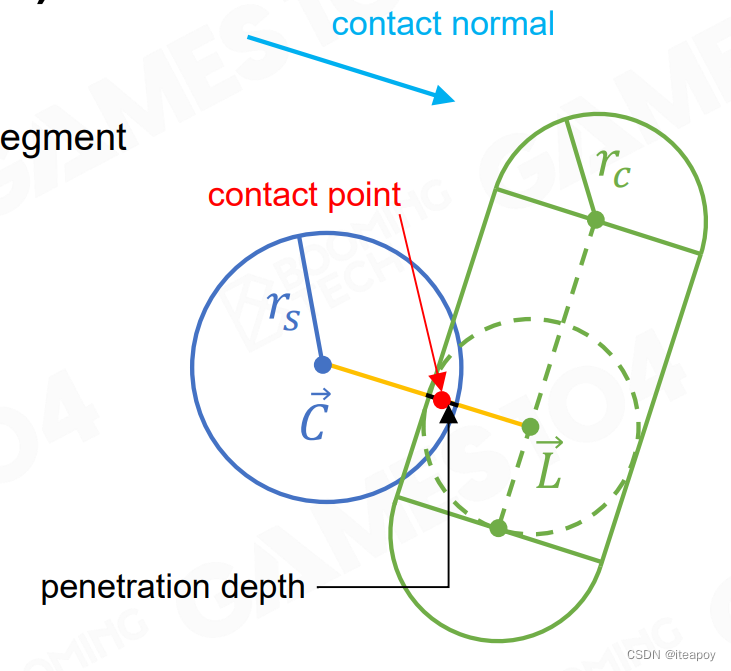
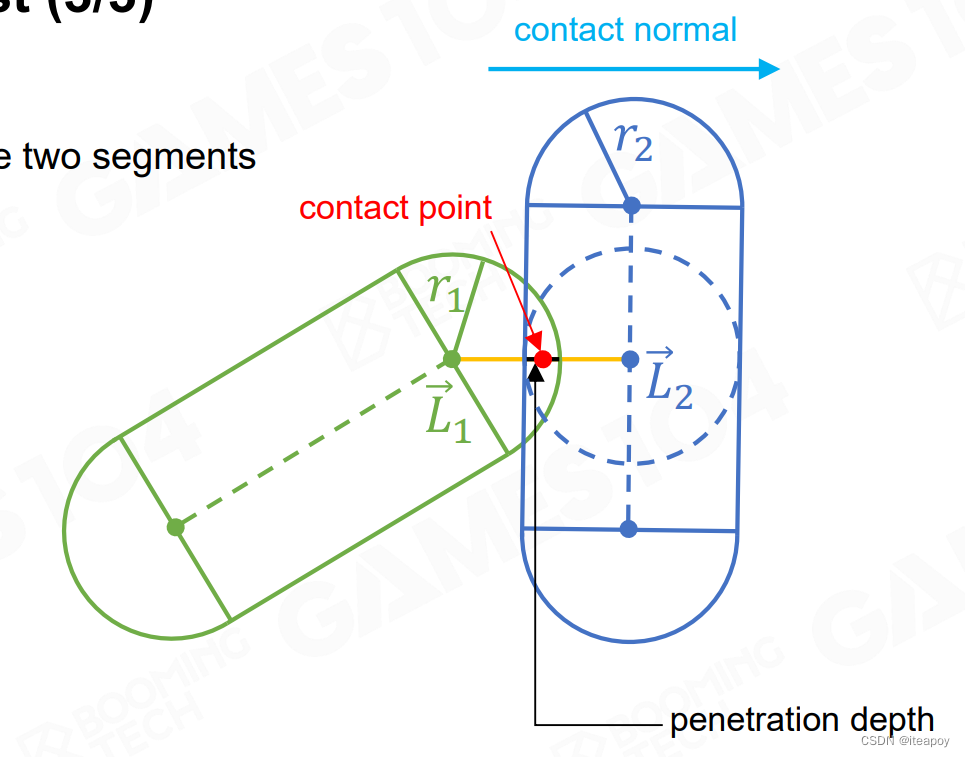
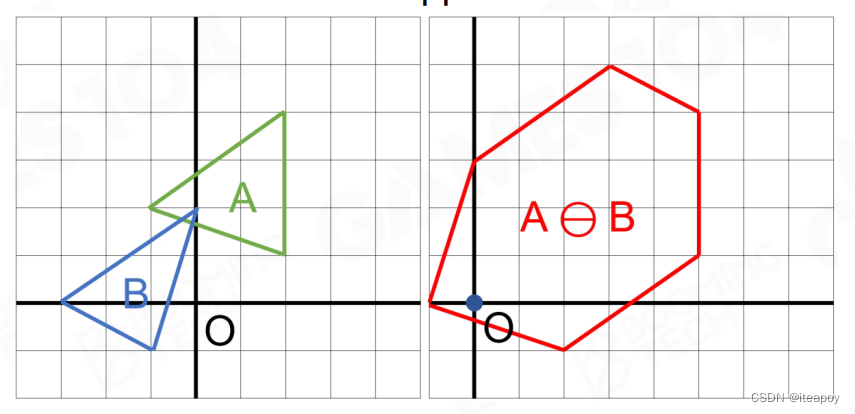
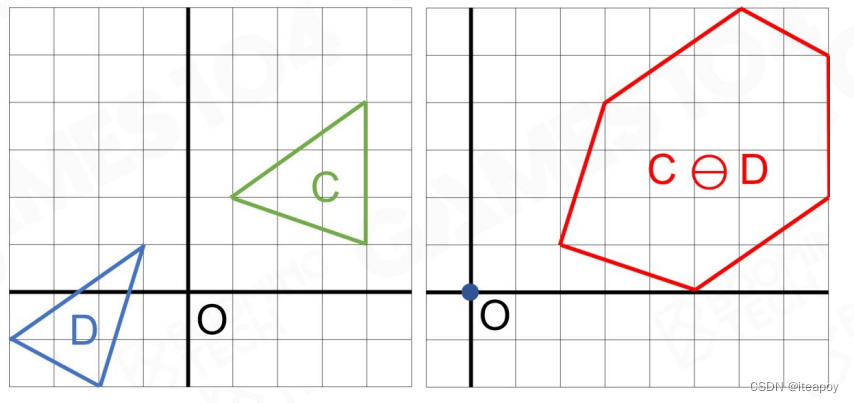
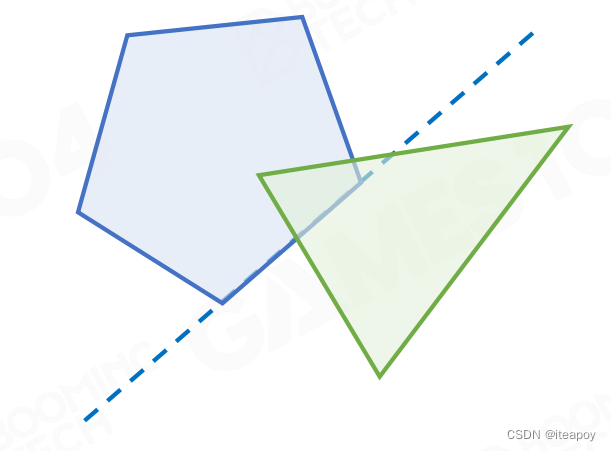
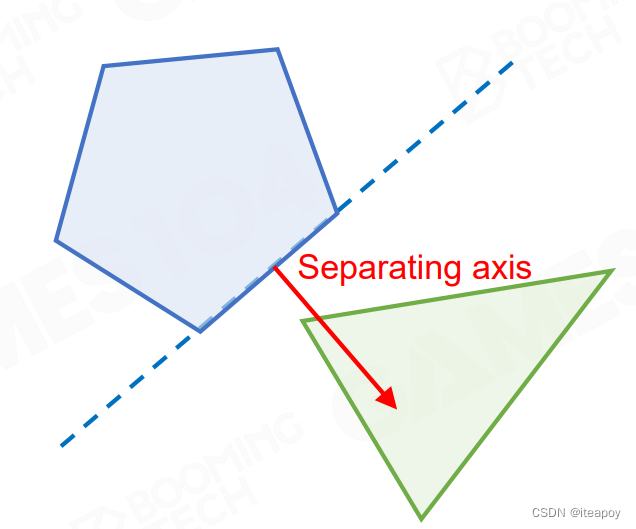
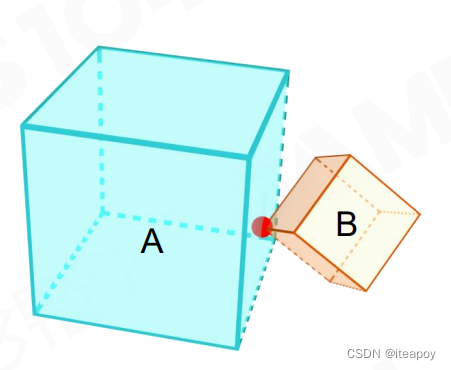
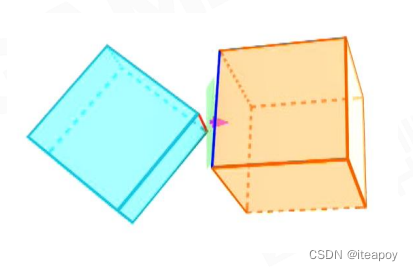
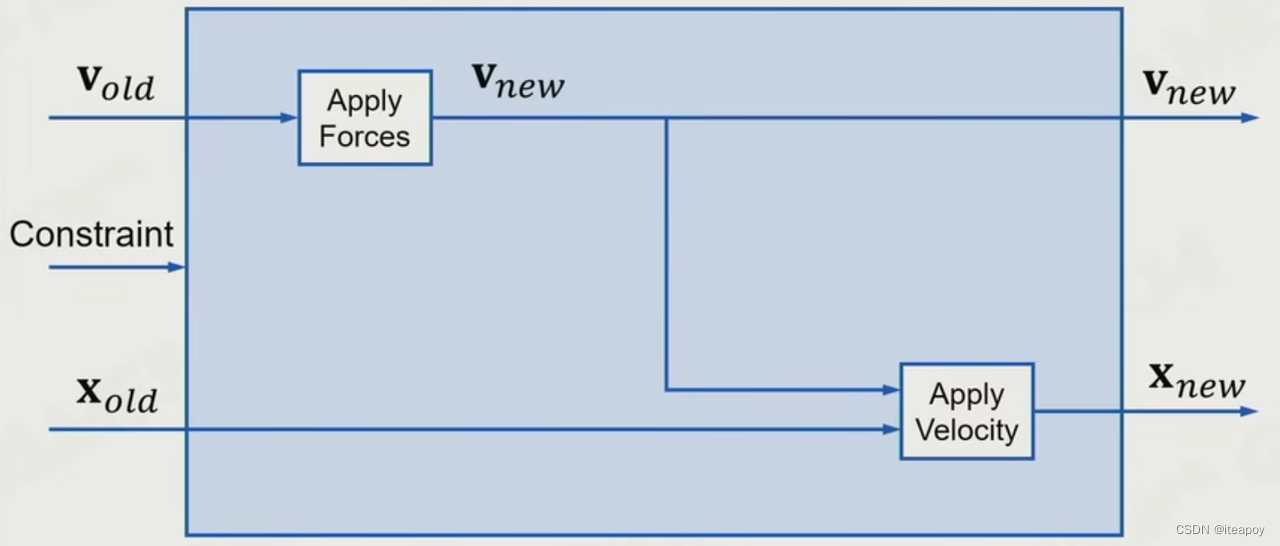
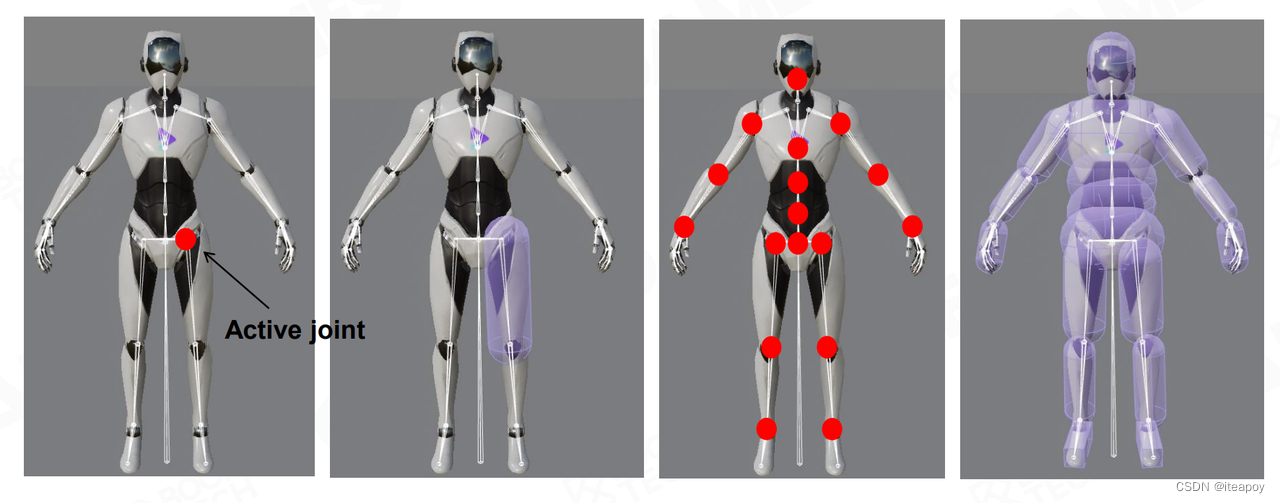
当前位置: 首页互联网正文 本文介绍: – 物理引擎的用途: – 碰撞检测 – 解决碰撞、其它约束限制 – 更新所有物体的世界坐标(world Transform) Collision Detection 碰撞检测:东西是否撞上了 碰撞检测的两个阶段 方法 粗筛 1. 直接用AABB找到相交的刚体 2. 找到潜在的重叠刚体对 1. BVH Tree 2. Sort and Sweep 细筛 1. 进一步检测重叠 2. 得到相交信息 1. 相交点 2. 相交法线 3. 穿透深度 1. Basic Shape Intersection Test 2. MinkowskiDifference-based Methods 3. Separating Axis Theorem Basic Shape Intersection Test 圆与圆碰撞 圆与胶囊体碰撞 胶囊体与胶囊体碰撞 MinkowskiDifference-based Methods 碰撞 未碰撞 Separating Axis Theorem(SAT) 一定能找到一根轴,分离两个凸包 碰撞 不碰撞 2D 情况 3D 情况 连续碰撞检测 Continuous Collision Detection(CCD) Collision Resolution 如何处理碰撞?分离 方法 具体方法 加入Penalty Force分离 加一个反向的惩罚力 转为约束问题 解决速度约束 不断尝试给一个冲量 解决位置约束 见 ragdoll – joint constraints 应用与实践 Character controller 反物理的系统:摩擦力无穷大 用 Kinematic Actor 不受物理规则影响 推动别的物体 形状 双层胶囊 Sweep test 与物体碰撞后,往旁边平移 Stepping 爬楼梯 尝试往上提,再往前走 Ragdoll 人体的 joint 约束(joint constraints) Hinge 铰链 Ball-and-socket 球窝 Pivot 枢轴 Saddle 鞍状 Condyloid 髁状突 Gliding 滑行 原文地址:https://blog.csdn.net/iteapoy/article/details/135620516 本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若转载,请注明出处:http://www.7code.cn/show_57334.html 如若内容造成侵权/违法违规/事实不符,请联系代码007邮箱:suwngjj01@126.com进行投诉反馈,一经查实,立即删除! 主题授权提示:请在后台主题设置-主题授权-激活主题的正版授权,授权购买:RiTheme官网显示所有内容声明:本站所有文章,如无特殊说明或标注,均为本站原创发布。任何个人或组织,在未征得本站同意时,禁止复制、盗用、采集、发布本站内容到任何网站、书籍等各类媒体平台。如若本站内容侵犯了原著者的合法权益,可联系我们进行处理。引擎相交碰撞检测 代码007普通 打赏 收藏 海报 链接