本文介绍: 让选择的特征点更加准确:把图像首先做一个金字塔,金字塔中每一层做不同的高斯滤波,让每一层图像进行不同程度的模糊,通过差分的方法选出最有价值的点,点的选择方法:DoG空间极值检测——在3X3的三维像素区域内(类似魔方)将中心点与周围26个像素点进行比较,得到候选关键点;然而计算机要有相同的能力却不是那么的容易,在未知的场景中,计算机视觉并不能提供物体的尺度大小,其中的一种方法是把物体不同尺度下的图像都提供给机器,让机器能够对物体在不同的尺度下有一个统一的认知。角点是图像中局部区域的交叉点或者突出的特征点。
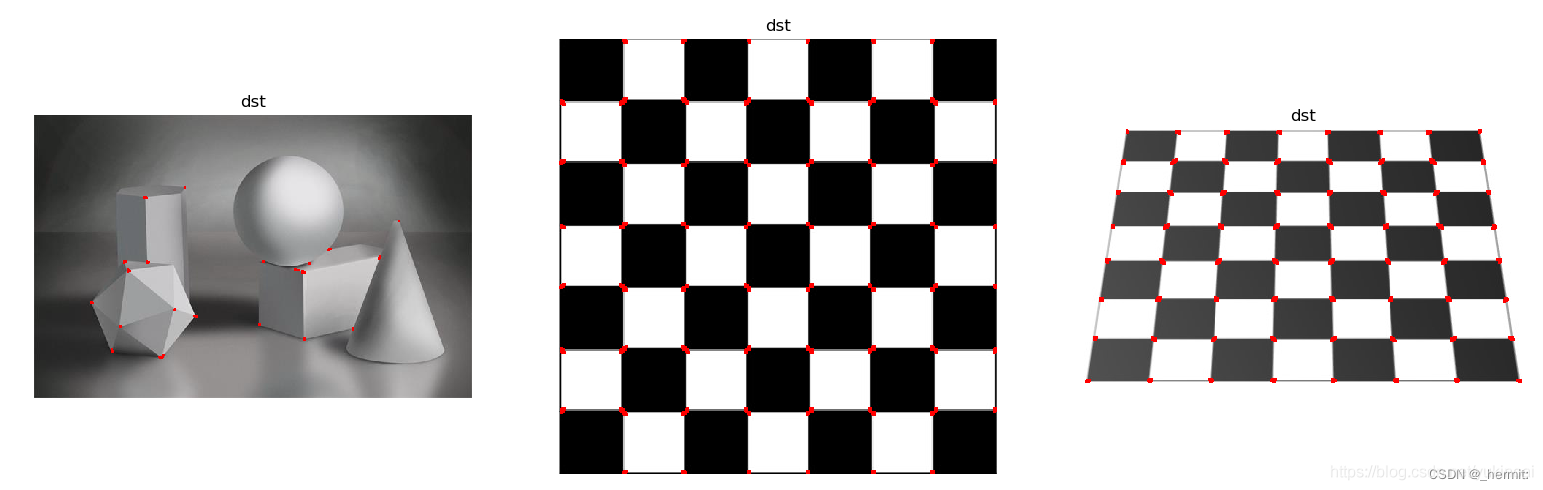
harris角点检测
原理
Harris 角点检测是一种用于在图像中检测角点的算法。角点是图像中局部区域的交叉点或者突出的特征点。Harris 角点检测算法旨在寻找图像中对于平移、旋转和尺度变化具有不变性的角点。
该算法通过计算图像中每个像素点的灰度值的变化,来识别角点。具体来说,Harris 角点检测通过以下步骤实现:
R
=
函数

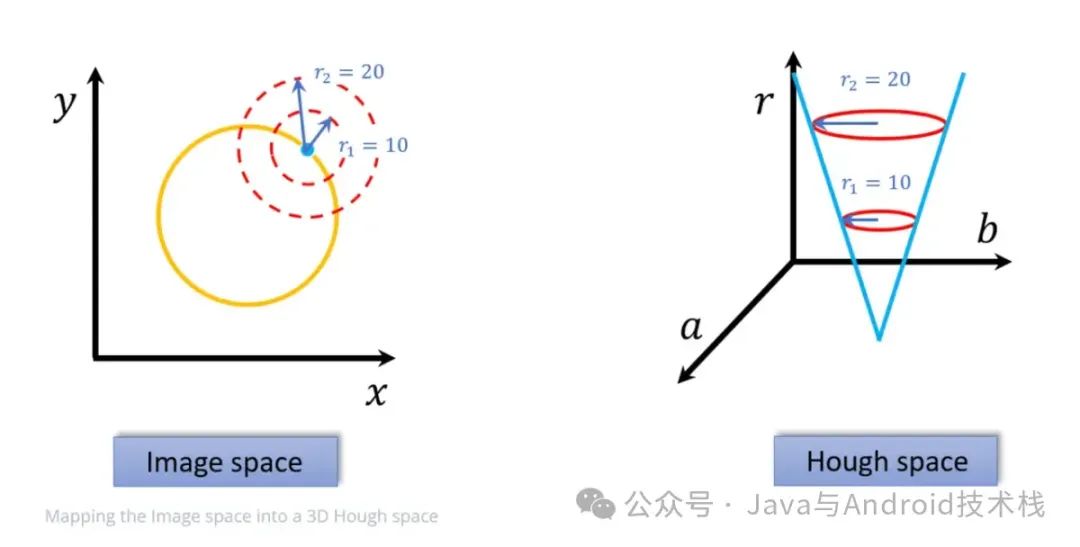
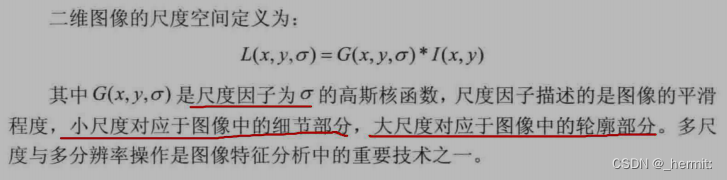
图像尺度空间
概念
局部不变性

局部不变特征
SIFT算法

声明:本站所有文章,如无特殊说明或标注,均为本站原创发布。任何个人或组织,在未征得本站同意时,禁止复制、盗用、采集、发布本站内容到任何网站、书籍等各类媒体平台。如若本站内容侵犯了原著者的合法权益,可联系我们进行处理。