本文介绍: 利用两个图像中至少四个特征点能够求解一个单应性矩阵(homography matrix),然后用这个单应性矩阵能够将图像1中的某个坐标变换到图像2中对应的位置。基本的思想是:数据中包含正确的点和噪声点,合理的模型应该能够在描述正确数据点的同时摒弃噪声点。而RANSAC算法则通过随机采样和一致性检验,从包含噪声的数据中估计出正确的模型参数,对于一些存在噪声和异常值的情况,RANSAC能够更稳健地估计模型。你提到的使用SIFT找到特征点,并通过单应性矩阵将图像进行变换,是一种常见的方法。通过SIFT找特征点。
蛮力匹配(ORB匹配)
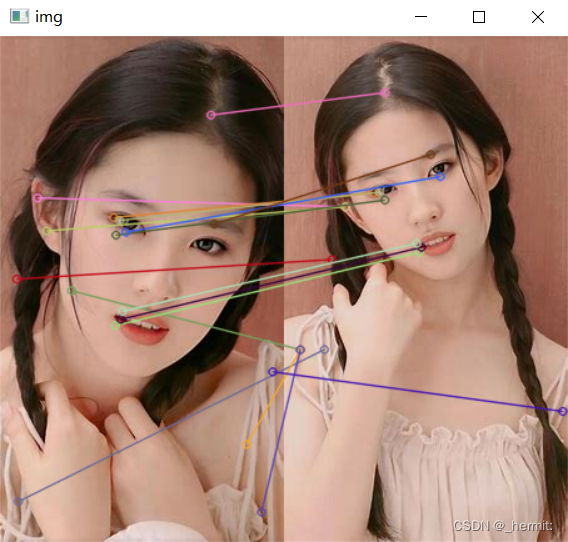
Brute-Force匹配非常简单,首先在第一幅图像中选取一个关键点然后依次与第二幅图像的每个关键点进行(描述符)距离测试,最后返回距离最近的关键点.
对于BF匹配器,首先我们必须使用**cv2.BFMatcher()**创建 BFMatcher 对象。它需要两个可选的参数:
两个重要的方法是BFMatcher.match()和BFMatcher.knnMatch(), 第一个返回最佳匹配, 第二种方法返回k个最佳匹配,其中k由用户指定.
使用cv2.drawMatches()来绘制匹配的点,它会将两幅图像先水平排列,然后在最佳匹配的点之间绘制直线。如果前面使用的BFMatcher.knnMatch(),现在可以使用函数cv2.drawMatchsKnn为每个关键点和它的个最佳匹配点绘制匹配线。如果要选择性绘制就要给函数传入一个掩模.
一对一匹配 BFMatcher.match()

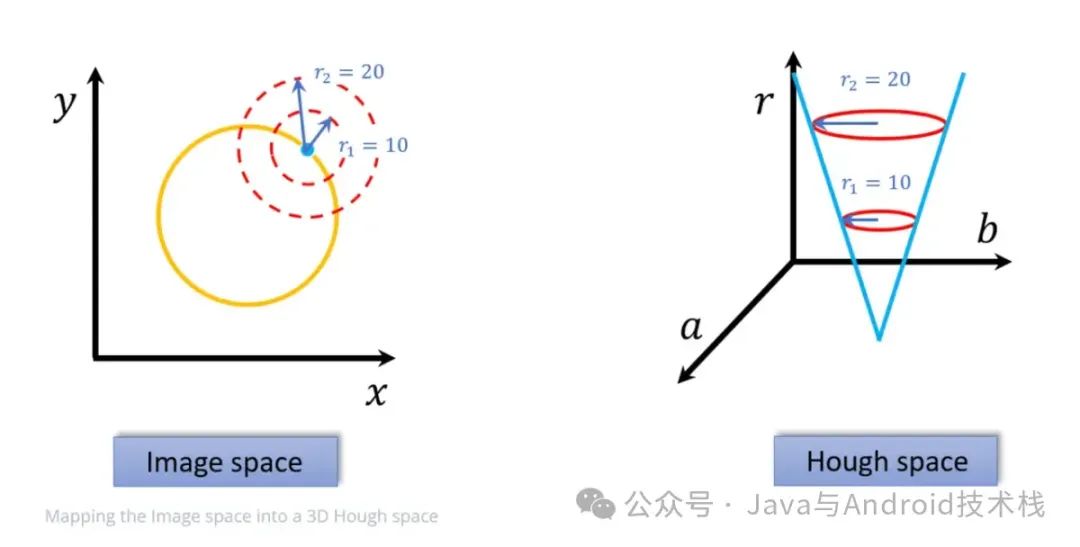
RANSAC算法
全景图像拼接
声明:本站所有文章,如无特殊说明或标注,均为本站原创发布。任何个人或组织,在未征得本站同意时,禁止复制、盗用、采集、发布本站内容到任何网站、书籍等各类媒体平台。如若本站内容侵犯了原著者的合法权益,可联系我们进行处理。