本文介绍: ros2学习,记录命令
环境变量
启动前要检查环境变量:ROS_DOMAIN_ID 和 ROS_LOCALHOST_ONLY。如果通信时PIN不同,应该首先考虑是不是环境变量设置错误。 Configuring environment
记得source一下ros2。
turtlesim和rqt
Turtlesim 是一款用于学习 ROS2 的轻量级模拟器。 它说明了 ROS 2 在最基本的层面上做了什么,让您了解以后将如何处理真实机器人或机器人模拟。
ros2 工具是用户管理、内省和与 ROS 系统交互的方式。 它支持针对系统及其操作的不同方面的多个命令。 人们可能会使用它来启动节点、设置参数、收听话题等等。 ros2工具是核心 ROS2 安装的一部分。
rqt 是 ROS2 的图形用户界面 (GUI)工具。 在 rqt 中完成的所有操作都可以在命令行上完成,但 rqt 提供了一种更用户友好的方式来操作 ROS2 元素。
以初始状态打开rqt
rqt每次启动都会以上次关闭时的状态打开,如果rqt界面出现了什么异常卡顿(比如某个页面无法点击,或者无法滑动),可以通过下面命令像第一次打开rqt一样。
node
启动节点
查看节点列表
查看节点更多信息
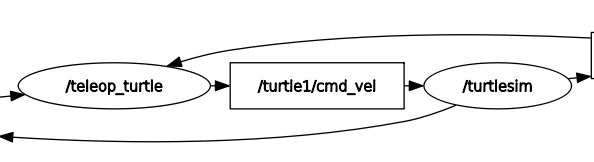
可以看到节点的话题信息(subscribers and publishers),服务信息(services), 动作信息(action servers and action clients)。
命令行参数 –ros-args
topic
话题列表
话题类型
话题列表,附加话题类型
根据类型查找话题名
查看话题发布的数据
查看话题的详细信息
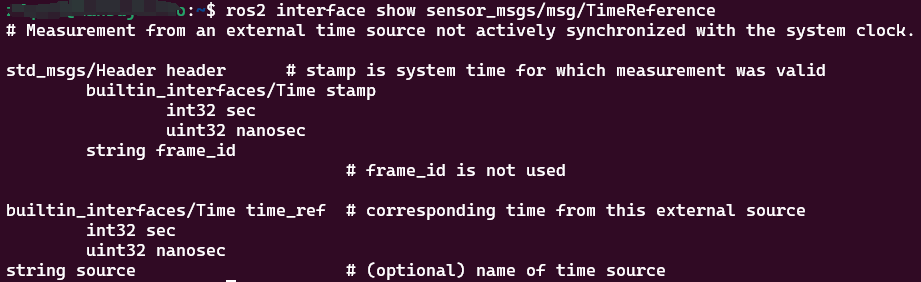
查看类型的详细信息
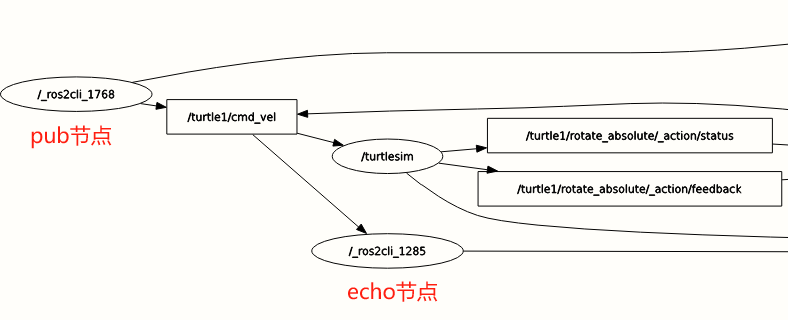
给话题发布消息(在命令行)
带有时间戳的消息
查看话题发布的频率Hz
service
服务列表
服务类型
服务列表,附加服务类型
根据类型查找服务名
服务类型结构
调用服务
parameters
参数列表
获取参数值
设置参数值
获取节点所有参数
为节点加载参数
启动时指定节点参数
action
通信方式
动作列表
动作列表,附加类型
动作更多信息
动作类型结构
发送动作目标
发送动作目标,要求有稳定的反馈
topic,service,action的区别
使用 rqt_console 查看特定日志消息
启动
过滤某些级别的消息
启动节点(Launching nodes)
记录和播放数据
记录单个topic
记录多个topic
查看记录信息
记录回放
声明:本站所有文章,如无特殊说明或标注,均为本站原创发布。任何个人或组织,在未征得本站同意时,禁止复制、盗用、采集、发布本站内容到任何网站、书籍等各类媒体平台。如若本站内容侵犯了原著者的合法权益,可联系我们进行处理。